
一种数控机床伺服系统参数辨识方法的研究
2015-05-30 08:52黎浩炜张礼兵姚亦成杨柳余宽平
科技创新与应用 2015年28期
黎浩炜 张礼兵 姚亦成 杨柳 余宽平
摘 要:针对数控机床伺服系统在模型辨识中存在的问题,为了减小系统模型建模误差,提高伺服系统的控制性能,提出一种在线实时的递推式最小二乘参数辨识方法。首先推导和构建了递推式最小二乘参数辨识数学模型,然后对三轴数控雕铣机床伺服系统模型参数进行在线辨识实验。实验结果表明所提出的方法能够有效地提高伺服系统的模型辨识精度,从而有效提高伺服系统的控制性能。
关键词:参数辨识;伺服系统;最小二乘法
引言
随着先进制造技术的发展,现代制造业对复杂曲线曲面零件加工提出更高的加工精度要求,数控机床对伺服系统性能提出更高要求。为了提高加工精度需要得到被控对象的精确的数学模型。通常,构建数控机床伺服系统数学模型的方法主要有三种:机理分析法、系统辨识法和混合建模法[1]。由于被控对象受到具体环境等因素的影响,不同时刻辨识得到的数学模型参数值有可能不相同。为了提高系统模型的辨识精度,叶军[2]在机器人运动学模型辨识过程中应用神经网络方法。李耀明等[3]研究了一种基于BP神经网络的数控机床测头测量误差参数辨识方法。李曦等[4]利用模糊聚类方法对数控加工过程中非线性关系模型进行辨识。这些方法在一定程度上提高模型的辨识精度,但是它们也具有较大的缺陷,如神经网络理论存在网络结构选择困难、容易限于局部最优解和出现过学习等问题。曹克强等[5]和王文栋等[6]利用支持向量机进行控制系统模型辨识与建模,实验结果表明SVM具有较高的建模精度和较强的泛化能力。但是支持向量机辨识方法的算法比较复杂,难以实现在线实时辨识。为了提高数控加工精度,实现伺服系统在线实时辨识,采用最小二乘参数估计法对数控机床伺服系统进行在线参数辨识。
1 系统参数辨识方法
2 实验验证
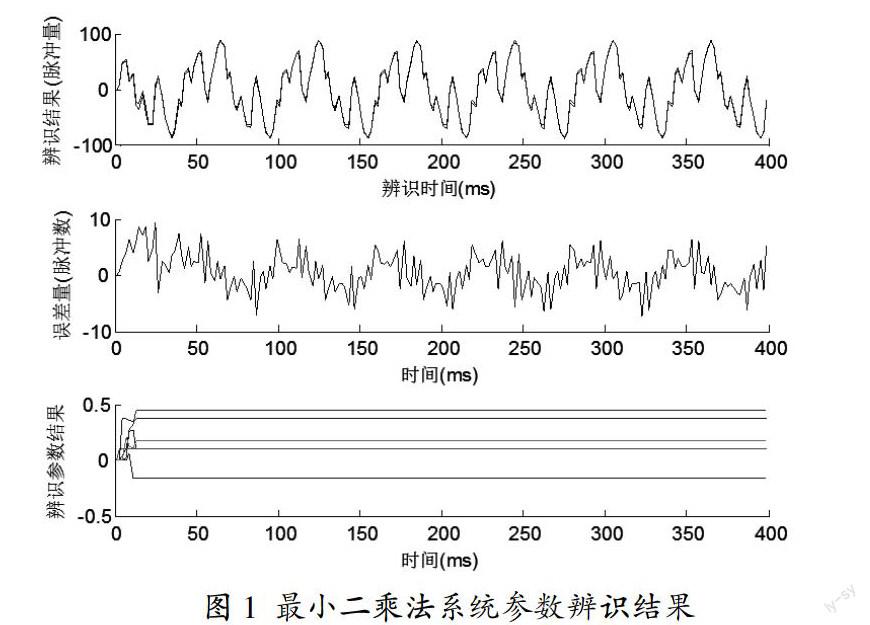
为了验证所提出的在线实时的系统参数辨识方法的可行性和有效性,采用自主研发的数控系统对某公司的三轴数控雕铣机床的伺服系统进行辨识与建模,实验条件包括:(1)硬件环境:PC机1台、DSP运动控制卡和模拟量卡各1块、数控雕铣机床1台。(2)软件环境:上位机数控界面系统和DSP运动控制系统软件各1套,用于发送输入信号和采集输出数据;数据处理软件平台为MATLAB R2009a。
白噪声作为系统输入信号能够获得较好的辨识精度,但是白噪声在实际工程中不容易实现,线性移位寄存器序列具有白噪声相似的性质,因此采用线性移位寄存器序列作为系统辨识的输入信号。由于线性移位寄存器序列含有直流成分,对系统造成净扰动,为了克服这种缺点,以逆线性移位寄存器序列作为系统辨识输入信号。
3 结束语
针对采用传统方法对数控机床伺服系统的模型参数建模存在较大的误差等问题,提出一种在线实时的递推式最小二乘参数估计方法,构建了递推式最小二乘法的数学模型,并对该方法进行设计和实现,然后针对某公司的数控机床伺服系统的模型参数进行实验验证。实验结果表明所提出的方法能够有效地提高该伺服系统的模型辨识精度,从而有效提高伺服系统的控制性能。
参考文献
[1]刘党辉,蔡远文,苏永芝,等.系统辨识方法及应用[M].北京:国防工业出版社,2010.
[2]叶军.基于快速学习型神经网络的机器人运动学模型辨识及运动控制[J].计算机仿真,2002,19(5):62-64.
[3]李耀明,沈兴全,孟庆義,等.基于BP神经网络的数控机床误差辨识方法研究[J].中北大学学报(自然科学版),2009,30(6):574-578.
[4]李曦,李斌,周云飞.数控加工中一种模型的模糊辨识算法的研究[J].中国制造业信息化,2003,32(6):111-114.
[5]曹克强,胡良谋,张春山,等.支持向量机在电液伺服系统辨识建模中的应用[J].空军工程大学学报(自然科学版),2007,8(3):43-45.
[6]王文栋,郭伟.基于的控制系统辨识建模研究[J].燃气涡轮试验与研究,2009,22(3):33-36.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年3期)2017-06-23
合作经济与科技(2017年1期)2017-01-03
电脑知识与技术(2016年27期)2016-12-15
科技视界(2016年22期)2016-10-18
考试周刊(2016年27期)2016-05-26
科技视界(2016年12期)2016-05-25
科技视界(2016年8期)2016-04-05
北京航空航天大学学报(2016年4期)2016-02-27
