
电流和速度双闭环PI控制在机械手模型上的应用
2015-05-30 14:41王海龙
科技创新与应用 2015年25期
王海龙
摘 要:文章利用matlab对机械手控制进行仿真,依据位置和电流的反馈信息,形成比位置反馈更稳定的双闭环控制,仿真结果表明双闭环控制达到了预期目的,并通过德州仪器的TMS320F2812型DSP芯片构建机械手控制系统,通过编程实现机械手的稳定精确控制。
关键词:机械手;仿真;电流;速度
引言
机械手运动的精确控制对伺服系统精度和稳定性要求较高,一般采用闭环PID控制,传统的数字PID控制是一种技术成熟、应用最为广泛的控制算法,其结构简单,调节方便,且不依赖于具体被控对象的数学模型,具有动、静态性能良好,稳态精度高的特点。但是传统的PID控制对于动特性复杂的控制对象,其一次整定出的PID参数往往不能达到最优。现代控制理论的发展与应用,一定程度上弥补了经典控制理论对时变非线性随机系统无能为力的缺点,但一般对被控对象具有一定的依赖性,不能从根本上解决复杂和不确定系统的控制问题。因此,考虑采用电流和速度双闭环PI控制应用到机械手伺服系统中来。
1 机械手模型
机械手本体动力学建模包括机械手运动学正逆解和机械手刚体动力学建模,是进行机械手控制和基于动力学模型控制算法设计的基础。
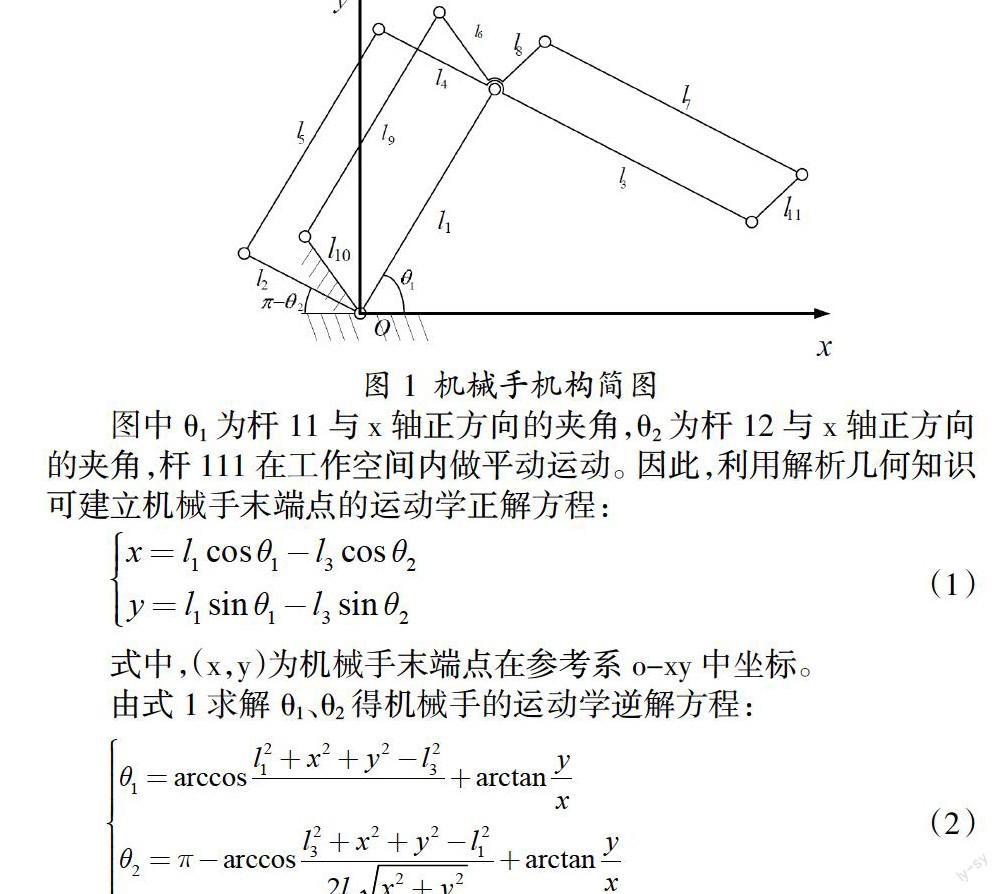
机械手采用的是典型两自由度平行四边形结构,机构简图如图1所示。图中,共有三组平行四边形,其中杆11、12、14、15为一组,杆11、16、19、110为一组,杆13、17、18、111为一组。以机械手的力矩输入轴为坐标原点,水平方向为x轴,垂直方向为y轴,建立固定参考系o-xy。
图中θ1为杆11与x轴正方向的夹角,θ2为杆12与x轴正方向的夹角,杆111在工作空间内做平动运动。因此,利用解析几何知识可建立机械手末端点的运动学正解方程:
2 PI调节的实现
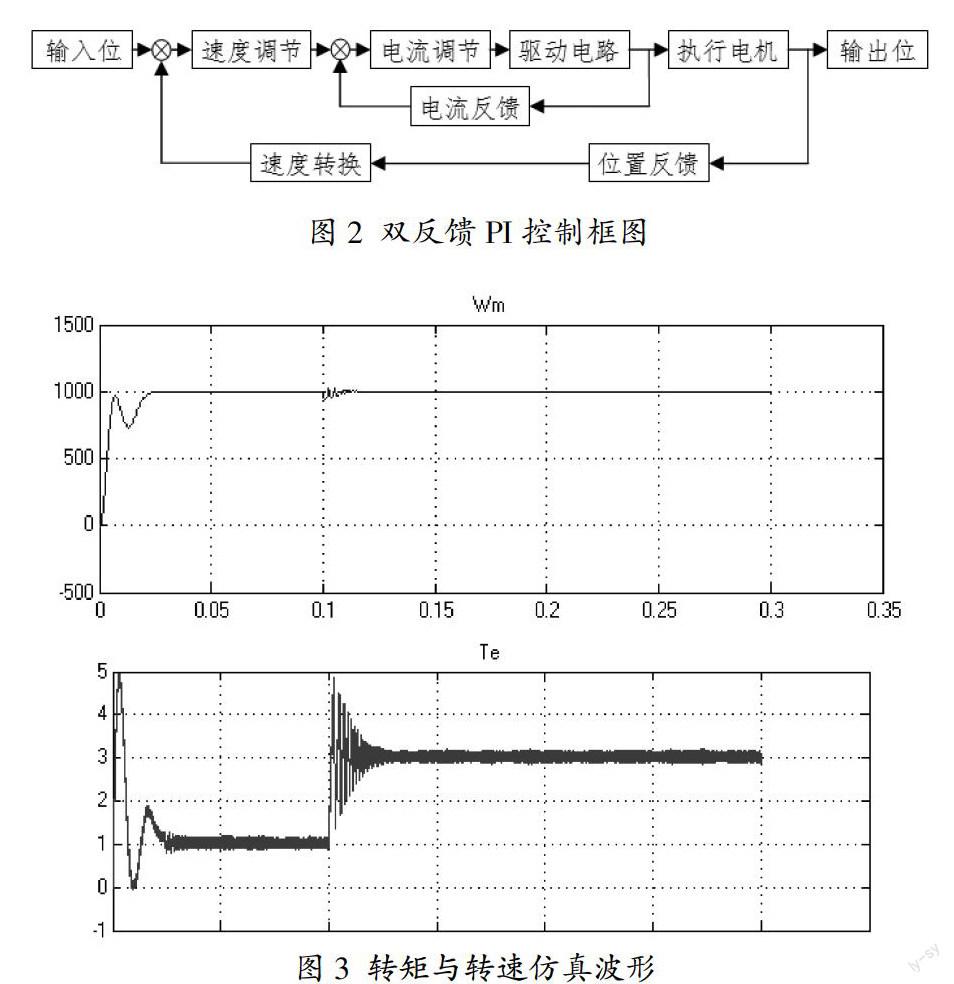
一般在应用中,采用位置反馈实现闭环PI控制,其调节性能并不理想,经常造成后期的速度响应特性差和力矩剧烈振动,出现波形发散等情况。为克服以上问题文章采用电流反馈和位置反馈的双闭环系统PI控制模型,即在速度给定下,通过反馈回来的电流和位置进行电流差和速度差的PI调节:(1)采集电流,经过与对应参数比较后送入到PI调节器调节。(2)采集光电编码机械角,转换为电角度后与给定速度值比较后送入PI调节器。(如图2所示)
3 仿真与分析
机械手的驱动伺服电机均采用永磁同步电机,并给定速度ω=1000rad/s;转矩负载给定为1N·m,当系统运行0.1s后,突加转矩负载到3 N·m,仿真波形如图3所示。
从双闭环的转矩和转速仿真图可知,在电机运行到0.1s时突加负载,电机的电磁转矩和转速有明显的波动,但很快便恢复平稳。这是因为当突加负载时,电机出力突然要加大,导致电流也要增加,同时还要保证原来的转速,此时速度、电流PI调节器产生了作用。PI调节器能快速的调节反馈和给定的误差,达到输出跟踪给定的效果。但是为了提高电机转速加大给定值,起始时PI输入的误差会很大,很容易造成系统超调。为了保证转速的准确跟踪,给定的速度就要受到限制。从图3中可以看出,PI速度调节器控制速度没有产生超调,系统虽然在启动和突加负载转矩时速度和转矩均有短暂的抖动,但系统能快速的恢复稳定,实现了伺服系统速度模式下的快速跟踪。
芯片和电路板采用TMS320F2812型DSP芯片作为机械手的控制单元,它可以同时控制2个电机,可应用于多轴动态控制,机械手关节编码器采用摩川TS5668N021型号绝对编码器,解码电路采用国产解码电路板,采用100:1的减速器连接伺服电机输出轴与机械手臂。机械手的运动空间为2平方米横截面,可实现截面内任意点的自由精确控制。
4 结束语
根据MATLAB仿真结果,通过电流采集和坐标转换、电机转子角度的反馈计算,实现闭环系统的精确PI控制,达到电机转速准确跟踪给定指令的要求,仿真结果符合电机实际运行特性,验证了电流和速度双闭环控制的伺服控制系统在控制精度和稳定性上均符合预期要求。
参考文献
[1]吴鹏.两自由度并联机械手动力学建模及其模糊变结构控制[D].哈尔滨工业大学,2007.
[2]赵永杰.高速轻型并联机械手动态设计理论与方法[D].天津大学,2006.
[3]I to K,Iwasaki M,Matsui N.GA-based practical compensator design for a motion control system. IEEE/ASME. Transiction on Mechatronics,2001,6(2):143-148.
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
小猕猴智力画刊(2022年4期)2022-05-25
中学生百科·大语文(2021年4期)2021-05-12
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
发明与创新(2016年5期)2016-08-21
通信电源技术(2016年1期)2016-04-16
机电信息(2015年3期)2015-02-27
