用于异面轴线间旋转运动传递的连杆机构设计
2015-07-12 17:18刘诗汉王新军
新技术新工艺 2015年4期
刘诗汉,王新军
(空军第一航空学院,河南 信阳 464000)
用于异面轴线间旋转运动传递的连杆机构设计
刘诗汉,王新军
(空军第一航空学院,河南 信阳 464000)
研究了输入输出均为旋转运动且两旋转轴不共面(也不垂直)的情况下连杆机构的结构设计。提出了3种方案:1)直接用1根连杆连接输入输出,形成RSSR结构;2)用1根任意方向的中间轴和2根连杆将输入输出连接起来,形成双RSSR机构;3)与方案2类似,不同的是中间轴与输入输出旋转轴均垂直。通过分析3种结构方案机构运动计算机模拟结果可知,方案3不仅在结构布局上具有一定的灵活性,而且更有利于保持输入输出运动间的线性关系。
空间连杆机构;异面轴线;运动模拟;RSSR;线性关系
连杆机构具有结构简单、可靠性好以及能远距离传递运动等优点,常用于大型装备的操纵系统。其作用是将驾驶杆绕固定轴线的旋转运动转移到空间另一位置,为伺服机构提供输入(伺服机构起放大器作用,产生更大的操纵力和运动距离,以满足执行机构大载荷大行程的要求)。受装备整体功能结构的限制,旋转运动在转移过程中,通常不仅旋转轴线的位置在变,而且方向也在变,最后摇臂的旋转轴与驾驶杆的旋转轴为既不平行又不相交,甚至不垂直的一般空间异面直线。另外,为了使驾驶人员正确感受自己的操纵力度和幅度,保证装备良好的操纵性,驾驶杆转动的角度和角速度等的大小在转移的过程中应基本不变或做线性变化[1]。本文研究了用于异面轴线间旋转运动传递的空间连杆机构的设计,给出了3种典型的结构设计方案,并对3种方案的运动特性进行了计算机模拟,通过对模拟结果进行比较分析,确定了最优方案及其设计原则。
1 设计条件
用连杆机构实现驾驶杆旋转运动在空间的转移相当于设计一个空间连杆机构,该机构的输入和输出均为旋转运动,而输入转轴和输出转轴的相互位置关系为一般空间异面直线,且输出与输入基本相等。输入输出2轴线的相对位置如图1所示,其中,I为输入运动的旋转中心,BI为旋转轴线,O为输出运动的旋转中心,AO为旋转轴线,AB为2轴线的公垂线。

图1 空间连杆机构的坐标系
为便于用方向余弦矩阵建立输入输出运动方程,建立了如图1所示的坐标系,以B为原点建立不动坐标系(Bx0y0z0),以I为原点建立动坐标系(Ix1y1z1),其中x1沿输入杆并跟随其运动;以O为原点建立另一动坐标系(Ox3y3z3),其中x3沿输出杆并跟随其运动。输入角θ1和输出角θ0按如下方式定义:对着z1轴看去,x0逆时针转至与x1重合所转过的角度为θ1;对着z3轴看去,x3逆时针转至与x0重合所转过的角度为θ0。为便于计算且不失一般性,设所有摇臂与其旋转轴都垂直。
2 方案设计
实现上述要求的连杆机构有很多,总体可以归纳为直接连接和间接连接2类。直接连接就是用1根连杆将操纵杆的一端与输出摇臂的一端相连[2]。间接连接是通过1根中间轴的过渡来传递,根据中间轴与输入输出轴的相对位置关系可分为2种情况:一种是中间轴与输入输出轴均为一般异面直线;另一种是中间轴为输入输出轴公垂线的平行线。下述分别说明这3种情况的连接方式。
1)方案1(直接连接)。按方案1构建的机构示意图如图2所示。杆IC为输入摇臂(驾驶杆),OD为输出摇臂,两者通过连杆CD直接相连。连杆与输入输出摇臂的连接应采用球面副,形成RSSR机构(也可采用RSS′R机构,输出摇臂的运动与RSSR机构完全相同,故不重复讨论)。
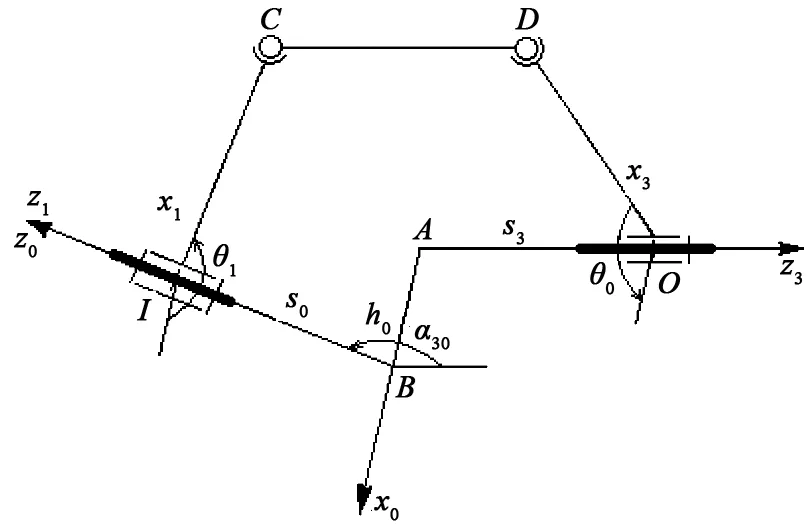
图2 按方案1构建的机构示意图
2)方案2(一般中间轴的间接连接)。按方案2构建的机构示意图如图3所示,PQ为中间轴,它与输入轴和输出轴不共面也不垂直。PF和QE是2根中间摇臂,固连在PQ轴上,分别与输入摇臂和输出摇臂相连,形成两级串联RSSR机构,第1级为ICFP四杆机构,第2级为QEDO四杆机构,第1级的输出即为第2级的输入。
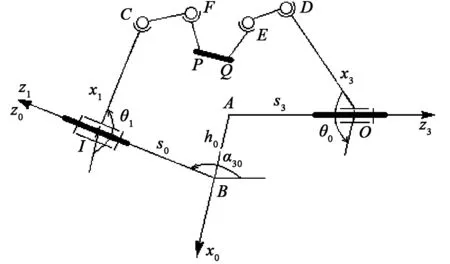
图3 按方案2和方案3构建的机构示意图
3)方案3(公垂线中间轴的间接连接)。按方案3构建的机构示意图如图3所示。方案3与方案2相似,不同的是中间轴PQ与输入轴和输出轴公垂线的方向——即与直线AB平行。
3 运动模拟

表1 机构1的几何参数

表2 机构2的几何参数
注:中间轴经过点(10,60,-15)及点(15.7,70.5,1),其中,前者为2摇臂的回转中心。

表3 机构3的几何参数
注:中间轴经过点(15,60,0)且与x0轴平行。
用大型工程设计软件CATIA的机构运动模块对上述机构进行运动模拟[3-5],输入摇臂的转角限定在[-30°,+30°],结果如图4所示。从图4可以看出,采用中间轴进行运动的传递,机构输入输出转角之间的线性度明显好于不用中间轴直接用连杆连接的方式,以方案3构建的连杆机构的线性度最好[6]。

图4 输入轴转角与输出轴转角间的关系
4 结果分析
运用方向余弦矩阵方法,建立以输入输出角表示的RSSR机构的运动方程:
Asinθ0+Bcosθ0+C=0
(1)
式中,A=cosα30sinθ1-s0sinα30/h1;B=-(h0/h1+cosθ1);C=(D-2s0s3cosα30)/2h1h3+(h0cosθ1-s3sinα30sinθ1)/h3;D=h12-h22+h32+h02+s02+s32。
当输入输出轴线为空间异面正交直线时,RSSR机构各构件的空间关系如图5所示,且有α30=90°,s3=h1,h0=h2,s0=h3,则:

(2)

(3)

(4)

图5 输入输出轴垂直的连杆机构示意图
从图5可以看出,初始条件为θ1=90°时,θ0=90°。设输入转角θ1有微小增量δ1,输出转角θ0也有微小增量δ0。由于δ1和δ0很小,近似有:
sinθ1=sin(90°+δ1)≈cosδ1≈1
cosθ1=cos(90°+δ1)≈-sinδ1≈-δ1
sinθ0=sin(90°+δ0)≈cosδ0≈1
cosθ0=cos(90°+δ0)≈-sinδ0≈-δ0
将上述关系式和式2~式4代入式1,忽略高阶无穷小量δ1δ0,化简得:

(5)
式5表明,在输入转角很小的情况下,输入输出转角与其杆长成反比,与中间连杆的长度无关。适当选取输入输出摇臂的长度,使得h1=h3,可得到δ0=δ1,即输出转角与输入转角相等。
若一空间连杆机构由N级输入输出轴线为空间异面正交直线的RSSR机构串联而成,每一级输入输出转角都存在如式5的关系,即:δ0(i)/δ1(i)=h1(i)/h3(i) (i=1~N)。因δ1(i)=δ0(i+1) (i=1~N-1),则有:

(6)
式6表明,N级串联机构总的输入输出转角间的关系仍然是线性的。这一结论虽然是在输入转角很小的条件下推导得出的,但在转角较大时也适用,这可以从图4得到证实。当每一级的输入摇臂与输出摇臂相等时,可得到整个机构的输出转角与输入转角相等,这样即实现了运动(角位移)的等量传递。
5 结语
用空间连杆机构来实现旋转运动在空间位置上的转移时,输入和输出之间的连接方式有3种:1)用连杆直接连接,形成单RSSR机构;2)添加任意中间轴进行连接,形成两级一般RSSR机构;3)添加1根与输入轴和输出轴均垂直的中间轴,即共垂线中间轴,形成两级输入输出轴垂直的正交RSSR机构。运动模拟表明,采取共垂线中间轴的方式连接能保证输入转角与输出转角之间良好的线性关系。特定条件下,可使输出转角与输入转角相等,实现运动的等量传递,这一结论可以推广到多级串联正交RSSR机构。
[1] 杨一栋. 直升机飞行控制[M]. 北京:国防工业出版社,2011.
[2] 韩建友.高等机构学[M]. 北京:机械工业出版社,2004.
[3] 单岩,谢龙汉. CATIA V5机械设计应用实例[M]. 北京:清华大学出版社,2004.
[4] 张长. 基于CATIA软件平台的自顶向下参数化装配设计[J]. 青海大学学报:自然科学版,2007(1): 83-85.
[5] 盛选禹,盛选军. CATIA V5运动和力学分析实例教程[M]. 北京:化学工业出版社,2008.
[6] 张玉茹.空间连杆机构的传动指标[J]. 机械设计,1992(2):32-34.
责任编辑郑练
DesignofLinkageMechanismforTransmissionofRotationaroundTwoUn-coplanarAxis
LIU Shihan,WANG Xinjun
(The First Aeronautic Institute of the Air Force, Xinyang 464000, China)
Design of a linkage mechanism was studied, whose input and output are all rotation but around two un-coplanar axis respectively. Three plans of construction were made out and discussed. The one is a kind of RSSR mechanism which was formed by connecting the input and the output directly with a linkage. The other was a kind of dual-RSSR mechanism formed by connecting the input and the output with some middle parts. The third was also a kind of dual-RSSR mechanism but the axis of a middle part in it is perpendicular simultaneously to the input rotary axis and the output one. Computer kinematic simulation conducted to these three mechanisms leads to the following conclusions: the third plan is flexible enough to layout and can obtain linear relationship between its input and output more easily than other two plans do.
spatial linkage mechanism, un-coplanar axis, kinematic simulation, RSSR, linearity
TH 112
:A
刘诗汉(1965-),男,博士,副教授,主要从事CAD/CAM和虚拟维修等方面的研究。
2014-09-18
猜你喜欢
语数外学习·高中版上旬(2020年8期)2020-09-10
装备制造技术(2019年12期)2019-12-25
船海工程(2019年3期)2019-07-03
铁道通信信号(2019年3期)2019-04-25
汽车实用技术(2018年20期)2018-10-26
中学生数理化(高中版.高二数学)(2018年2期)2018-04-04
校园英语·中旬(2017年10期)2017-11-20
北京汽车(2017年4期)2017-10-13
吉林省教育学院学报(2017年3期)2017-05-31
高中生学习·高二版(2016年9期)2016-05-14