基于MATLAB GUI的步进电动机升降速参数生成软件设计
2015-07-12 17:17范巧艳
新技术新工艺 2015年4期
范巧艳
(西安职业技术学院 机电工程系,陕西 西安 710032)
基于MATLAB GUI的步进电动机升降速参数生成软件设计
范巧艳
(西安职业技术学院 机电工程系,陕西 西安 710032)
针对步进电动机起动和停止过程中出现的失步和过冲现象,分析了某型步进电动机的矩频特性,总结出了步进电动机升降速控制原则,提出了一种利用曲线拟合的升降速曲线设计步骤及升降速参数的生成方法,利用MATLAB GUI开发出步进电动机升降速参数生成软件,成功生成了升降速参数,对各型步进电动机的控制均具有一定的工程应用价值。
MATLAB GUI;步进电动机;矩频特性;升降速曲线
步进电动机能够以开环控制方式对位置和速度进行控制,由于没有反馈,步进电动机必须精确响应每个控制脉冲,否则在升速或降速阶段会出现过冲或失步;因此,步进电动机控制系统中,升降速过程的控制非常关键。本文编写了基于MATLAB GUI的步进电动机升降速参数生成软件,由该软件生成单位控制周期内的转速参数。控制硬件将转速参数写入存储器中,每次上电将其转存到内存,以便控制步进电动机时调用。
1 步进电动机控制系统
步进电动机控制系统一般由微控制器(如DSP、单片机)、外扩FLASH ROM、步进电动机驱动器和步进电动机等组成,控制系统原理图如图1所示。微控制器将电源信号、方向信号、步进脉冲信号和停止信号送至步进电动机驱动器,经处理后,将步进电动机的方向信号和功率放大后的步进脉冲信号送至步进电动机。

图1 步进电动机控制系统原理图
从步进电动机控制系统出发,控制步进电动机的升降速就是利用软件控制微控制器的步进脉冲信号发送速率。改变单位控制周期内的步进脉冲速率,一般应将参数写入FLASH ROM。本文利用MATLAB GUI友好的人机界面和强大的计算能力,快捷生成升降速参数[1]。
2 步进电动机矩频特性
控制步进电动机关键是要保证步进电动机在起动、停止和升降速过程中,不失步和不过冲,其主要和步进电动机的矩频特性有关。矩频特性曲线是指步进电动机转矩与输入步进脉冲信号频率关系的曲线,对应为步进电动机转速与步进电动机转距的控制关系。某型步进电动机矩频特性曲线如图2所示,由此可以计算得出该步进电动机的矩频特性参数(见表1)。
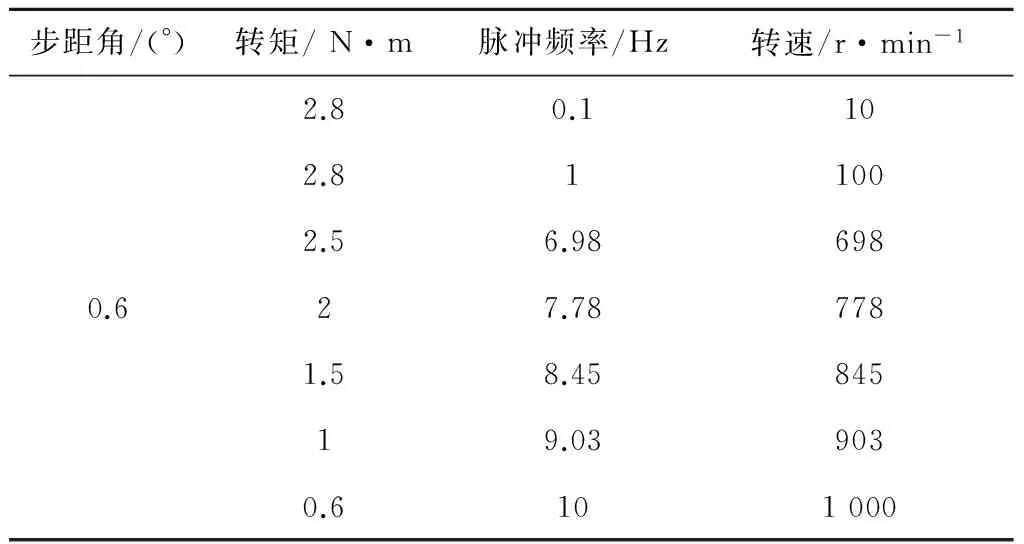
表1 某步进电动机矩频特性参数
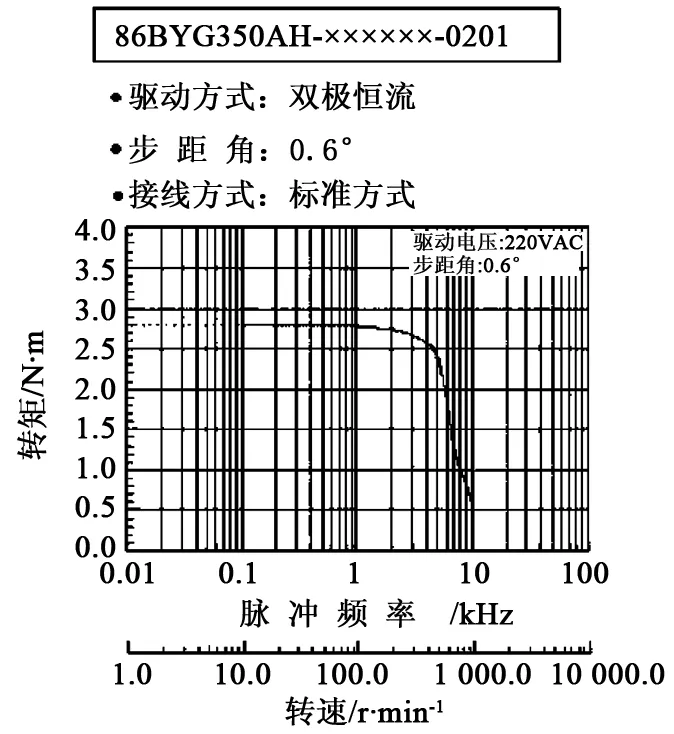
图2 某型步进电动机的矩频特性曲线
从图2和表1可以看出,步进电动机的转矩随着转速提高而下降,由此带来如下问题:1)若外部负载太大,则造成阻力太大,步进电动机无法起动,应重新选用电动机;2)若起动转速太大,则步进电动机无法起动,需要通过多次试验得出起动转速;3)若速度上升过快,力矩下降过快,容易造成失步,若速度下降过快,力矩上升过快,容易造成过冲,需要设计合适的升降速曲线,进而控制步进脉冲频率,使上升速度和下降速度平缓一些[2]。
总之,步进电动机升降速曲线保持在矩频特性曲线下方,即可保证步进电动机在起动、停止和升降速过程中不失步和不过冲,这是步进电动机升降速控制的原则。
3 升降速参数生成软件算法
通过对步进电动机矩频特性的分析可以看出,步进电动机的控制应设置正确的起停转速,并且以最快的速度转到设定位置,整个过程要求不失步、不过冲。步进电动机的起动频率一般比最高运行频率低很多,逐渐提高步进脉冲频率可以使步进电动机以最快的速度转到位。
起动频率主要靠试验确定,升降速曲线的设计就是要寻求一种与步进电动机矩频特性相适应的速度控制方案。常见的升降速方案有直线型、S型和指数型等。根据步进电动机的矩频特性,起动阶段负载转动惯量较大,升速曲线应缓和一些;高速阶段,步进电动机转矩下降较快,转速也应缓和上升。降速曲线与升速曲线对称,可以得出,S型曲线是最适合的升降速方案。下述介绍升速曲线的设计步骤以及升速参数的生成方法,同理可得降速曲线和降速参数[3-6]。
1)根据表1的数据,以转速为自变量,转矩为因变量,进行曲线拟合。给实际工程应用留下一定余量,纵坐标取为原来的0.8,保证转速满足步进电动机的矩频特性。曲线拟合公式为:
f′(x)=0.8f(x)
(1)
f′(x)=ax^n+bx^(n-1)+…+cx+1
(2)
拟合出的曲线应当在步进电动机矩频特性曲线的下方。
2)步距角与转速成反比关系。设步距角为θ,对应转速为v,0.6°步距角对应转速为v1,则:
v=θv1/0.6
(3)
这样,根据步距角θ得到相应的转速v,以v为自变量,转矩为因变量,利用式1和式2进行曲线拟合。
3)通过试验获得起动频率,由起动频率获得初始转速v0,由设计要求获得最高转速vt,则式2自变量x的取值范围为:v0~vt。
4)设微控制器控制周期为t,步进电动机转动总时间要求为T,则取值个数r为:
r=T/t
(4)
5)以小增量转速(如0.1 r/min)对式1拟合的多项式进行插值。插值所得到的曲线应该在步进电动机矩频特性曲线的下方。
6)以转矩为自变量,转速为因变量,对第5步中插值所得的数据进行反拟合,得到转矩-转速拟合曲线,拟合阶数为n1。
7)均匀分配转矩升高速率,根据式4计算所得参数个数,对第6步拟合的曲线进行插值,从而生成升速曲线参数。降速是升速的逆过程,逆序排列升速参数即可得到降速参数。
经过上述7步,可得到满足步进电动机矩频特性的升降速转速参数,为编写软件做好了算法准备。
4 基于MATLAB GUI的升降速参数生成软件
MATLAB GUI人机界面优良,且拥有MATLAB软件强大的计算能力,本文选择MATLAB GUI作为开发工具。软件输入变量包括:步距角θ、起动转速v0、终止转速vt、微控制器控制周期t、步进电动机转动总时间T、矩频特性曲线拟合阶数n、转矩-转速曲线拟合阶数n1。输出量为升降速转速参数。软件设计中主要用到了MATLAB曲线拟合函数polyfit()和曲线插值函数polyval(),避免了使用复杂的数学公式,使得本文所设计的步进电动机升降速参数生成软件十分简洁实用。软件运行效果如图3所示。
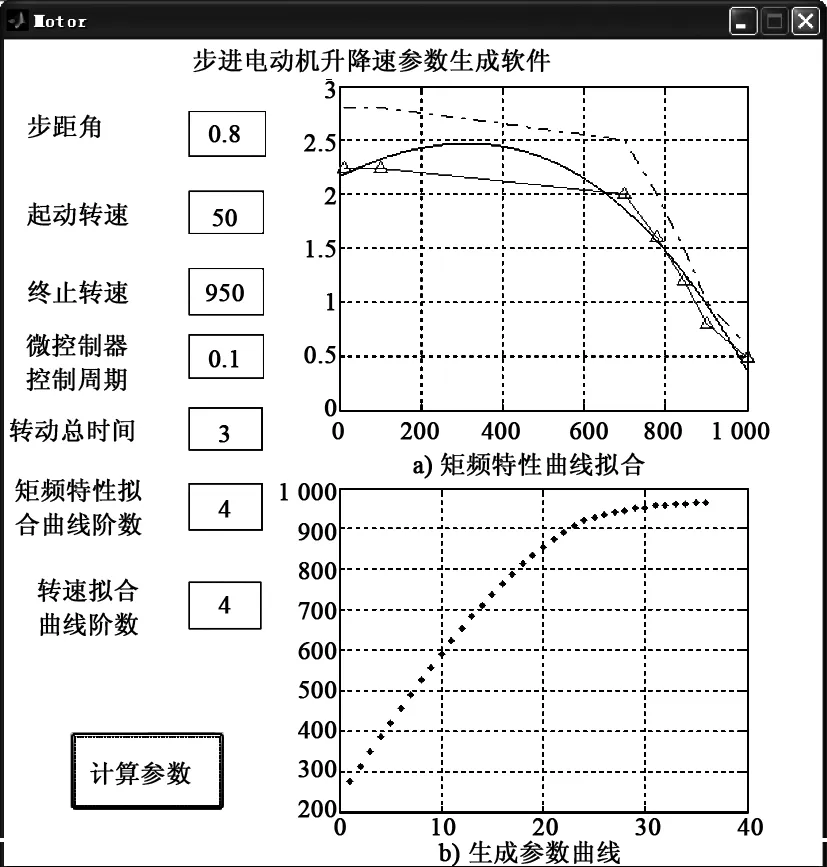
图3 某型步进电动机升降速参数生成软件运行界面
图3a所示为矩频特性曲线拟合示意图,点划线为某型步进电动机矩频特性曲线,三角和点化线为留有余量的矩频特性曲线,实线为根据式1进行插值所得到的曲线,该曲线在步进电动机矩频特性曲线的下方,满足设计要求。图3b所示为拟合后的生成参数曲线,其中,横坐标为参数个数,纵坐标为生成参数,曲线大致符合S型升速曲线,满足步进电动机的升速需求。降速是升速的逆过程,逆序排列升速参数即可得到降速曲线。
设转动总时间为3 s,微控制器控制周期为0.1 s,步距角为0.6°,起动速度为100 r/min,对软件生成的参数进行简单修改,得到最终生成的升速参数,见表2。
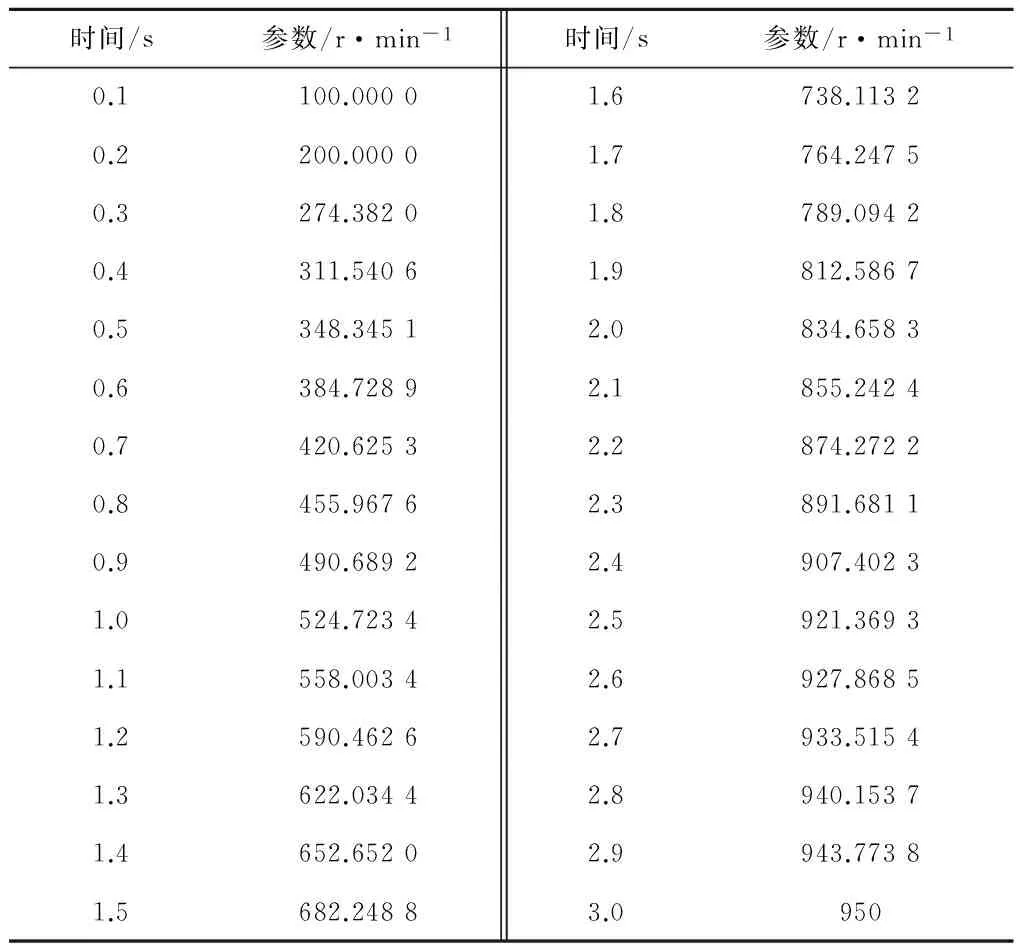
表2 步进电动机升速参数表
将该参数写入FLASH ROM中,微控制器在控制步进电动机升降速时通过查表方式调用。
5 结语
针对步进电动机的失步和过冲问题,介绍了步进电动机控制系统硬件,分析了步进电动机的矩频特性,总结出了步进电动机升降速控制原则,提出了一种利用曲线拟合的升降速曲线设计步骤及升降速参数生成方法,并利用MATLAB GUI工具开发了升降速参数生成软件。软件的成功开发对各型步进电动机的控制均具有一定的工程应用价值。
[1] 高亮.8051单片机对步进电机的控制及步进电机升降速曲线的设计[J].测控技术, 2002,21(11):1-2,67-68.
[2] 黄法恒,刘利.基于单片机的步进电机升降速及精度控制研究[J].微电机,2010,43(3):95-97.
[3] 池海宁.步进电机失步原因及解决方法[J].机电设备(技术篇),2006(4):15.
[4] 李海波.单片机对步进电机三相六拍指数规律升降速的并行控制[D].北京: 北京化工大学,2003.
[5] 坂本正文. 步进电机应用技术[M]. 王自强 ,译. 北京:科学出版社,2010.
[6] 陈曙光,张洪伟,刘晓,等. 关于风力发电机齿轮啮合传动的有限元分析[J].新技术新工艺,2014(10):56-58.
责任编辑李思文
ParameterGenerationSoftwareofRaisingandReducingSpeedsofStepMotorbasedonMATLABGUI.
FAN Qiaoyan
(Department of Mechanical and Electrical Engineering, Xi′an Vocational Technical College,Xi′an 710032, China)
Desynchronizing and overshooting often occurs on step motor′s starting and stopping. Torque characteristics of a step motor were analyzed and principles of raising and reducing speeds were summarized in the paper to solve the problem. The step of designing speed-up and speed-down curve based on curve fitting and the way of generating parameters of raising and reducing speeds of step motor were proposed, parameter generation software was developed based on MATLAB GUI, this brined certain value in engineering of types of step motor’s controlling.
MATLAB GUI, step motor, torque characteristics, speed-up and speed-down curve

TM 383.6
:A
范巧艳(1986-),女,助教,硕士研究生,主要从事信号与信息处理等方面的研究。
2015-01-11
猜你喜欢
火炸药学报(2021年5期)2021-12-06
气象学报(2021年2期)2021-05-13
上海人大月刊(2020年12期)2020-12-30
现代计算机(2020年31期)2020-12-28
中国信息化周报(2020年15期)2020-05-11
数学大世界(2020年2期)2020-03-07
中国新闻周刊(2019年9期)2019-04-29
价值工程(2017年31期)2018-01-17
电子制作(2017年14期)2017-12-18
汽车文摘(2017年6期)2017-12-06