等效道路线声源位置优化研究∗
2015-10-27 02:21蒋从双1瑞1洁1
应用声学 2015年3期
蒋从双1,2† 吴 瑞1,2 杨 洁1,2
(1北京市劳动保护科学研究所 北京 100054)
(2国家环境保护城市噪声与振动控制工程技术中心 北京 100054)
⋄研究报告⋄
等效道路线声源位置优化研究∗
蒋从双1,2† 吴 瑞1,2杨 洁1,2
(1北京市劳动保护科学研究所北京100054)
(2国家环境保护城市噪声与振动控制工程技术中心北京100054)
计算道路交通噪声时,一般将每个车道等效为1个线声源。有时,为了简化计算,将道路等效为1个线声源,等效线声源位置为道路中轴;或等效为2个线声源,等效线声源位置为道路两侧中心线或两侧最外车道中心线。本文推导了不同等效方法下观测点噪声的计算公式,并探讨了不同等效方法引起的误差。研究结果表明,将道路等效为2个线声源,等效线声源位置为道路两侧中心线的简化方法引起的误差最小。
道路线声源,等效线声源位置,优化
1 引言
道路交通噪声计算中常将道路看作线声源,再按线声源的特性来计算观测点噪声。一般情况下,道路均为双向多车道,将每条车道看作一个线声源计算观测点噪声无疑是最准确的。然而在实际计算中,将多车道道路看作多条线声源进行计算需要占用较大的计算资源,而且也很难准确获取每条车道上的交通流信息。这时,就需要对道路进行简化处理,将道路等效为1个或2个线声源,且等效线声源处于不同位置。
在各国道路交通噪声预测模型中,英国CRTN模型[1]认为等效道路线声源位置位于路肩内3.5 m处;法国NMPB模型[2]将每条车道看作1个线声源(如图1(a)),可以根据精度需求将道路等效为1个线声源,等效线声源位置为道路中轴(如图1(b))或将道路等效为2个线声源,等效线声源位置分别为道路两侧中心线(如图1(c));日本ASJ模型[3]也将每条车道看作1个线声源,为了简化计算,可以将道路等效为2个线声源,等效线声源位置为道路两侧中心线。德国RLS90模型[4]认为等效道路线声源位置位于道路两侧最外车道中心处(如图1(d));环境影响评价技术导则-声环境(HJ2.4-2009)[5]将每条车道看作1个线声源,并未明确其简化方法。
可以看出,各模型中等效道路线声源位置不尽相同,本文将对不同等效道路线声源位置的计算方法及其引起的误差进行详细地探讨。
2 观测点噪声计算方法
假定有一条双向4车道的道路,1条车道的宽度为2D(2D通常大小为3.25~3.75 m),不考虑道路中间绿化带,则道路宽度为8D,车流量为N(为了简化计算,假定所有车辆为单一车型),车辆均匀地行驶在不同车道上,每条车道上车辆平均行驶速度均为V,观测点距离道路边缘为L。分别计算下面4种情况下观测点的噪声大小:(1)将每条车道看作一个线声源,分别计算4个线声源对观测点噪声的影响,再叠加起来便可以得到整条道路的影响;(2)将道路等效为1个线声源,等效线声源位置为道路中轴,计算该条道路对观测点噪声的影响;(3)将道路等效为2个线声源,等效线声源位置分别为道路两侧中心线,计算该道路对观测点噪声的影响;(4)将道路等效为2个线声源,等效线声源位置分别为道路两侧最外侧车道中心线,计算该道路对观测点噪声的影响。图1给出了不同等效道路线声源位置的示意图。
假设:单车在r0处排放的噪声为Lr0,单车排放的噪声由于空气吸收、地面效应等各项因素引起的衰减量为A。

图1不同等效道路线声源位置示意图Fig.1 Sketch of the different equivalent positions of the road line-sources
(1)第一种方法
第1车道(最近的车道)对观测点的噪声贡献量[5]为

3 不同等效道路线声源位置的误差分析
无疑,第一种方法计算的观测点噪声是最准确的,认为其他方法与第一种方法的差值即为该方法的误差。

其实,将车辆划分为不同车型进行计算,计算过程复杂些,但不同方法的误差计算结果仍只取决于参数p。
对于双向4车道的道路,运用不同方法引起的误差如图2所示。

图2双向4车道不同测点处不同计算方法引起的误差Fig.2 Errors induced by different methods of two-way 4 lanes图2 双向4车道不同测点处不同计算方法引起的误差Fig.2 Errors induced by different methods of two-way 4 lanes
3 不同等效道路线声源位置的误差分析
无疑,第一种方法计算的观测点噪声是最准确的,认为其他方法与第一种方法的差值即为该方法的误差。
其实,将车辆划分为不同车型进行计算,计算过程复杂些,但不同方法的误差计算结果仍只取决于参数p。
对于双向4车道的道路,运用不同方法引起的误差如图2所示。
图2双向4车道不同测点处不同计算方法引起的误差Fig.2 Errors induced by different methods of two-way 4 lanes图2 双向4车道不同测点处不同计算方法引起的误差Fig.2 Errors induced by different methods of two-way 4 lanes
可以看出,第二种方法和第三种方法的误差恒为负值,第四种方法的误差恒为正值;第三种方法的误差最小,第二种方法的误差最大;p值越小,不同方法的误差均越大,但实际中,p值不可能无限小,比如HJ2.4-2009中关于观测点噪声的计算公式只适用于r>7.5 m,其中r为观测点到车道中心线的距离。
下面对车道数更多的道路进一步分析,对于双向6车道的道路,仍假设1条车道的宽度为2D,不考虑道路中间绿化带,则道路宽度为12D,此时运用不同方法引起的误差如图3所示。
对于双向8车道的道路,仍假设1条车道的宽度为2D,不考虑道路中间绿化带,则道路宽度为16D,此时运用不同方法引起的误差如图4所示。
可以看出,对于双向6车道和8车道的道路,不同方法的误差规律与双向4车道的道路相似。但对于双向8车道的道路,第四种方法的误差最大,这与双向4车道的道路略有差别。
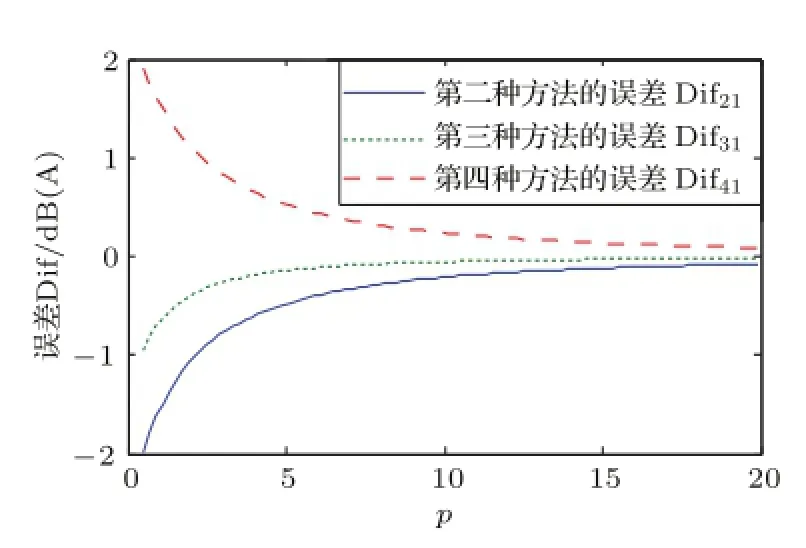
图3 双向6车道不同测点处不同计算方法引起的误差Fig.3 Errors induced by different methods of two-way 6 lanes
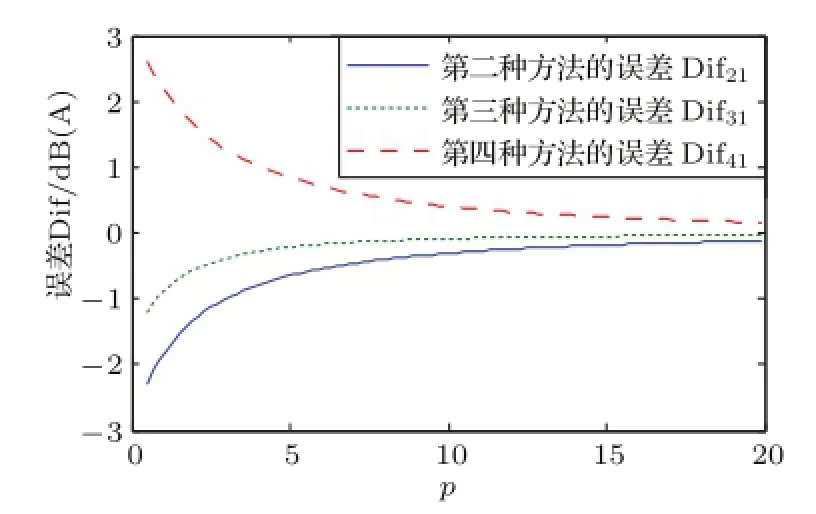
图4 双向8车道不同测点处不同计算方法引起的误差Fig.4 Errors induced by different methods of two-way 8 lanes
4 实际验证
上述理论分析仅适用于理想的道路和流量条件,然而应用于实际情况时,车流量并不是均匀地行驶在各车道上,道路中间往往有绿化带或每条车道宽度不一致等状况。因而,将实测车流量(假设实测的是整条道路的车流量)平均分配到每条车道上便不再准确,不同方法的误差计算便不再只由参数p决定。针对实际情况,上述误差分析结果的适用情况值得考究。
实测北京市一级公路白马路(京沈路与小中河桥之间路段)的各项道路参数、各车道的车流量及平均速度,道路双向4车道,两侧最外侧均有1车道为非机动车道,道路每条机动车道宽度为3.75 m,道路中间有5 m宽的绿化带,近侧车流量偏低,远侧车流量偏高,车流量实测参数如表1所示。两侧大中小车辆平均运行速度分别为63.7 km/h、55.3 km/h、65.6 km/h。运用实际参数(认为各车道车辆平均行驶速度相同)计算不同线声源简化方法在距离路肩1 m、10 m、20 m和30 m共4个观测点的误差,如图5所示。

表1各车道车流量Table 1 Traffic volume of each lane

图5 实际道路不同测点处不同计算方法引起的误差Fig.5 Errors induced by different methods of actual roads
可以看出,尽管实测道路与理论分析假定条件并不完全一致,但不同方法引起的误差随p值的变化规律与理论分析结果基本趋势一致。
分析表明,不同方法计算出的观测点噪声大小为L2<L3<L1<L4;第三种方法计算的误差最小,对于双向4车道以下的道路,第二种方法计算的误差最大,对于双向6车道以上的道路,第四种方法计算的误差为最大;观测点与道路越近,误差越大;道路越宽,误差越大。
当观测点p值较大时,采用第三种方法或第二种方法计算观测点噪声引起的误差较小。假设允许的计算误差为0.5 dB,对于双向4车道的道路,p值大于4(也就是观测到路肩距离大于7 m,假定车道宽度为3.5 m)的观测点采用上述两种方法均满足误差要求;对于双向6车道的道路,p值大于6的观测点均满足误差要求;对于双向8车道的道路,p值大于8的观测点均满足误差要求。
5 结论
德国RLS90模型将等效道路线声源位置位于道路两侧最外车道中心处的方法引起的误差较大;法国NMPB模型和日本ASJ模型将每条车道看作1个线声源,也可以根据精度需求将道路等效为2个线声源,等效线声源位置分别位于道路两侧中心线,这种处理方法引起的误差较小。
一般地,在观测点与路肩距离较大时,将道路简化为2条线声源,线声源位于道路两侧中心线,甚至将道路简化为1条线声源,线声源位于道路中轴的处理方法引起的误差较小。
致谢感谢环保公益性行业专项《基于噪声地图的环境噪声评价技术》和北京市科学技术研究院萌芽计划《纵坡道路噪声分布规律研究》对本文研究的大力支持。
[1]Department of Transport Welsh Office.Calculation of road traffic noise[M].London:HER Majesty's Stationery Office,1988.
[2]BESNARD F,HAMET J F,LELONG J,et al.Road noise prediction 1-Calculating sound emission from road traffic,Sétra[M].France:Sétra,2011.
[3]Kohei Yamamoto.Road traffic noise prediction model “ASJ RTN-Model 2008”:Report of the Research Committee on Road Traffic Noise[J].Acoust.Sci.&Tech.,2010,31(1):2-55.
[4]Richtlinie für den lärmschutz an straßen(RLS-90)-Guidelines for noise protection on streets[M].Berlin:Springer,1990.
[5]HJ2.4-2009.环境影响评价技术导则-声环境[S].
Optimization of the equivalent position of road line-source
JIANG Congshuang1,2WU Rui1,2YANG Jie1,2
(1 Beijing Municipal Institute of Labor Protection,Beijing 100054,China)(2 State Environmental Protection Engineering Center for City Noise&Vibration Control,Beijing 100054,China)
Generally,each lane is treated as a line-source when calculating road traffic noise.However,in order to simplify calculation,the entire road may be equivalent to as one line-source located at centerline of the road,or equivalent to two line-sources located at centerline or centerline of outside lanes of each road side respectively.Different calculation formulae of sound pressure level at receiver points of those methods are deduced.Then,derived errors of those formulae are discussed.The results demonstrate that the simplification,which the entire road is treated as two line-sources located at centerline of each road side,has the smallest error than the other two methods.
Road line-source,Equivalent position of the road line-source,Optimization
TB533+.4
A
1000-310X(2015)03-0255-05
10.11684/j.issn.1000-310X.2015.03.011
2014-11-03收稿;2015-01-30定稿
∗环保公益性行业专项和北京市科学研究技术研究院萌芽计划
蒋从双(1989-),男,安徽人,硕士,研究方向:交通噪声。†
E-mail:jcs_bmilp@126.com
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
水电站机电技术(2022年4期)2022-04-18
现代农村科技(2021年2期)2021-03-15
绿色科技(2019年12期)2019-07-15
电子制作(2019年23期)2019-02-23
科技视界(2016年19期)2017-05-18
电子制作(2016年19期)2016-08-24
中外医疗(2015年5期)2016-01-04
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
舰船科学技术(2015年8期)2015-02-27