
3-PCR并联机构精度分析
2015-11-03 07:17柴保明陈景礼王肖肖许海皎
组合机床与自动化加工技术 2015年1期
柴保明,陈景礼,王肖肖,许海皎
(河北工程大学机电工程学院,河北邯郸 056038)
3-PCR并联机构精度分析
柴保明,陈景礼,王肖肖,许海皎
(河北工程大学机电工程学院,河北邯郸 056038)
首先,对3-PCR并联机器人机构进行建模,基于微分原理,通过求解3-PCR并联机构的位置微分方程,得到了机构的精度分析模型。然后,使用MATLAB仿真来分析各主要误差源对该机构动平台精度的影响(主要误差源有主动副转动误差、结构参数误差和位姿变化引起的误差)。最后,通过以上分析对3-PCR并联机器人机构的实际误差补偿与控制奠定了理论基础。
3-PCR并联机器人;位置反解;精度分析;仿真
0 引言
并联机构越来越成为人们研究的热点,因为它们以其结构简单、承载能力强、自重负荷小、精度高等优点,不断扩大应用领域[1]。它们比串联机构在很大程度上降低了传动误差的积累,可是由于装配和机械加工水平有限,必然会产生误差。其中,并联机构的精度,对机器人的工作性能有很大影响[2-5]。本文将对具有相似平台的3-PCR并联机器人机构的精度进行分析,根据精度分析的数学模型,使用MATLAB仿真分析了各主要误差源对该机器人机构精度的影响(主要误差源有驱动杆杆长误差、结构参数误差和位姿变化引起的误差)。
1 机构建模和位置反解分析
3-PCR并联机构由两个相似平行的三角形平台和3条相同支链(i=1,2,3)组成,上平台为定平台,下平台为动平台,和分别为两平台的形心。每条支链均有一个定长连杆、移动副(P)、圆柱副(C)和转动副(R)。上平台与各支链中上端固定连接,其夹角均为每条支链转动副的中心线和下平台在一个共同平面内。下平台对应边和每条链中所有圆柱副、转动副的轴线相互平行,建立好的机构模型如图1。

图1 3-PCR并联机器人的示意图
取上平台形心及各顶点为坐标原点,建立了(图1)固连坐标系O-xyz与Oi-xiyizi(i=1,2,3)。yi方向总是指向上平台的形心,O-xyz与Oi-xiyizi各轴线方向相同。基于下平台建立坐标系P-x4y4z4,坐标轴各方向与O-xyz坐标轴各方向相同[6]。其中,每条链均施加两个相互垂直的约束力偶在动平台上,约束它的转动,移动副在杆长的约束范围内作轴向伸缩运动,动平台在各约束下实现三维平动[7]。
如图2所示,上下平台边长分别为a、b,定长连杆BiCi的长度为hi,驱动杆OiBi的长度为li,上平台与OiBi的夹角为α,定长杆与水平方向的夹角为θi,di为各个圆柱副中心在Oi-xiyizi坐标系中沿xi方向的位移。a,b,hi,α为常量,li、θi、di为变量。

图2 3-PCR单支链位置参数示意图
由图1和图2得动平台形心坐标如下:

并且三根支链相对于z轴均匀分布,因此,将第一根支链旋转120°和240°,则得到另外两支链的位置方程为:

整理有逆解方程有:

2 机构精度分析数学模型
根据该机构的逆解方程

将其微分变形后有:

式中:

为3-PCR机器人的逆雅克比矩阵J-1,与机器人的位姿、结构参数有关。当机器人处于奇异位姿时,有J-1=0,即OiBi⊥BiCi。所以在设计这类机器人时应避免上述条件。
3 实例分析
基于上述精度分析的数学模型,来分析对该机构动平台精度影响的各主要因素,设3-PCR机器人机构的各个参数如下[8-9]:

3.1 主动副转动误差对机器人精度的影响
设机构的结构参数误差均为0.05 mm,xp=yp= 80mm,zp=100mm,dθ1,dθ2,dθ3(主动副转动误差),分别由-0.1°变化到0.1°时,在计算机上仿真结果如图3。


图3 主动副转动误差对3-PCR并联机器人动平台精度的影响线图
3.2 结构参数误差对机器人精度的影响
机构转动误差dθ1=dθ2=dθ3=0.1,当结构参数误差d l3,d d2分别由-0.05 mm变化到0.05 mm时,其他误差为0.05 mm,计算机仿真结果如图4。
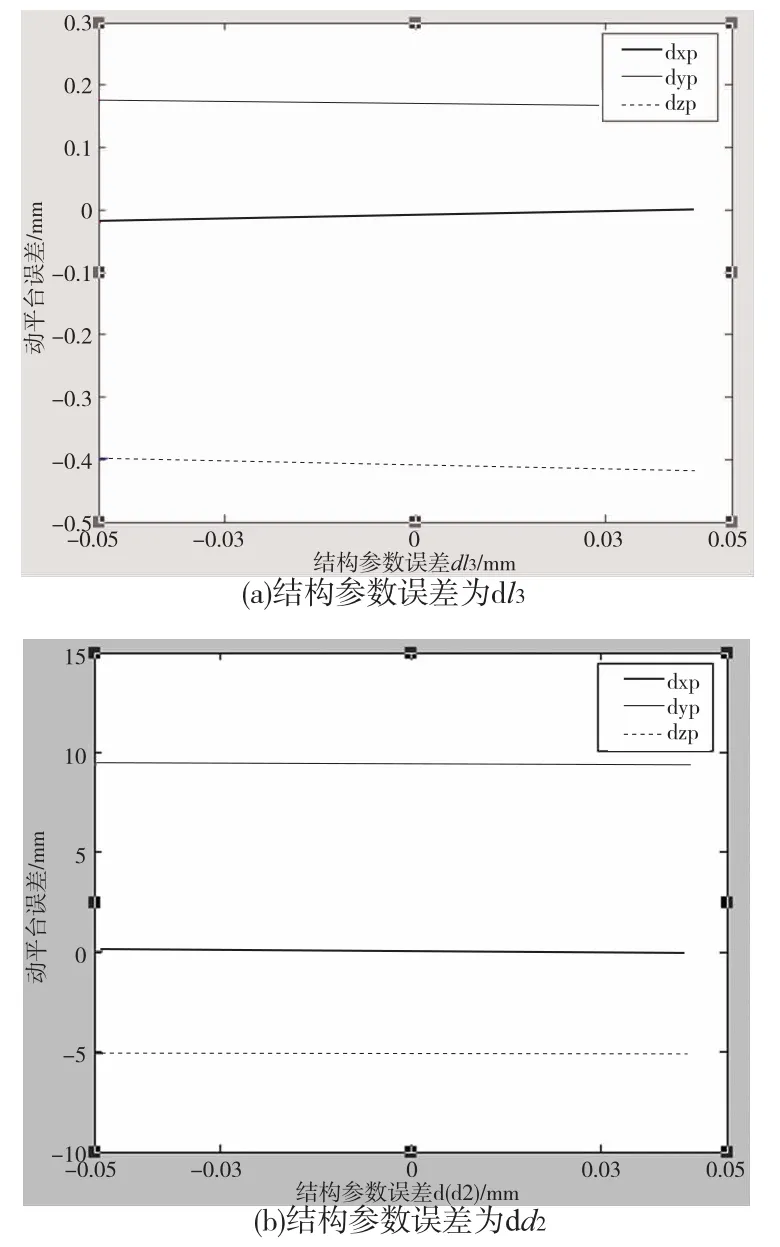
图4 结构参数误差对3-PCR并联机器人精度的影响线图
3.3 机器人精度随位姿的变化
设机构的结构参数误差均为0.05mm,转动副的转动误差为dθ1=dθ2=dθ3=0.1,当机器人的位置改变时,计算机仿真结果如图5。
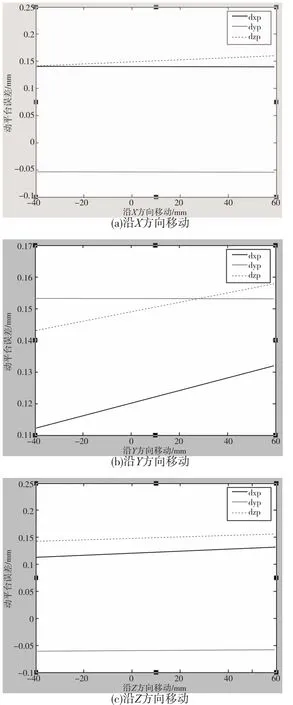
图5 机器人精度随位置的变化线图
4 结果分析
根据MATLAB仿真结果,影响机器人精度的因素很多,不同因素对机器人动平台的精度影响不同,主要体现为[10]:
(1)主动副的转动误差对机器人动平台X轴方向误差没有影响,对Y轴方向误差和Z轴方向误差影响较大;而转动副的转动误差和转动副的转动误差对X、Y、Z轴方向误差影响较大,但对X轴方向误差和Y轴方向误差相对比较平缓。
(2)结构参数误差对Y、Z轴方向误差、影响较大,而对X轴方向误差几乎没有影响。
(3)机器人的位置变化也引起机器人动平台精度的变化。当动平台沿X、Y、Z轴方向移动时,X、Y、Z轴方向误差变化明显,而Y轴方向误差因此,机器人精度对主动副的转动误差较敏感,应严格加以控制,结构参数误差对机器人动平台Y、Z轴方向误差影响较大,以及位置变化也对动平台精度有不同程度的影响,应加以限制。通过以上分析,为该机器人机构实际误差补偿与控制奠定了理论基础。
变化较小(但正方向误差大)。
[1]杨斌九,蔡光起,罗继曼,等.少自由度并联机器人的研究现状[J].机床与液压,2006,34(5):202-205.
[2]FengG,WeiM L,Xian C Z.New kinematic structures for2-,3-,4-,and 5-DOF parallel manipulator designs[J].Mechanism and Machine Theory,2002,37:1395-1411.
[3]Tsai LW.Kinematics of a three-DOF platform with three extensible limbs[C].5th International Symposium on Recent Advances in Robot Kinematics,Bernardin-Portoroz,Slovenia,1996.
[4]GOSSELIN CM.Determination of the Workspace of 6-DOF Parallel Manipulators[J].Journal of Mechanical Design,1990,112(3):331-336.
[5]CompanyO,PierrotF.Modelling and design issues of a 3-axis par-allel machine-tool[J].Mechanism and Machine Theory,2002,37:1325-1345.
[6]葛玉华,韩军,冯虎田.刀库及机械手多态可靠性建模与分析[J].组合机床与自动化加工技术,2013(9):21-24.
[7]李波,陈安军.3-PCR并联机器人机构的运动学分析[J].机械设计与究,2009(5):31-34.
[8]褚金钱,徐方.基于Solidworks与Matlab的码垛机器人动力学仿真[J].组合机床与自动化加工技术,2013(9):28-31.
[9]赵文辉,赵萍,段振云,等.微米级机器视觉系统中随机误差与系统误差的研究[J].组合机床与自动化加工技术,2013(9):108-110,114.
[10]郭宗和,牛国栋,孙术华,等.三平移并联机器人机构的精度分析[J].农业机械学报,2006(1):145-148.
Accuracy Analysis of 3-PCR Parallel Mechanism
CHAI Bao-ming,CHEN Jing-li,WANG Xiao-xiao,XU Hai-jiao
(Hebei University of Engineering College of Mechanical and Electrical Engineering,Handan Hebei056038,China)
First,build modeling for the 3-PCR parallel robot mechanism,according to the differential theory,through solve the 3-PCR parallel robot mechanism position differential equation,this article establish the analysis model of accuracy.Then,using MATLAB simulation to analyze impact of the main error sources to the institution moving platforms accuracy(main error sources are active pair rotation error,the structural parameters error and the error caused by body position changes).Finally,we provide a theoretical basis to 3-PCR parallel robot mechanism's actual error compensation and control.
3-PCRParallel robot;inverse position;analysis of accuracy;simulation
TH1166;TG659
A
1001-2265(2015)01-0060-03 DOI:10.13462/j.cnki.mmtamt.2015.01.017
2014-05-09
柴保明(1964—),男,河北邯郸人,河北工程大学教授,博士,研究方向为机械设备故障诊断方法研究、并联机器人机构学理论研究、机电系统设,(E-mail)jdchaibaoming@163.com。通讯作者:陈景礼(1988—),男,满族,河北承德人,河北工程大学硕士研究生,研究方向为3-PCR并联机构精度分析,(E-mail)shanying112@126.com。
猜你喜欢
一重技术(2021年5期)2022-01-18
中学生数理化·中考版(2021年10期)2021-11-22
农业机械学报(2021年10期)2021-11-09
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2019年23期)2019-02-23
电子制作(2018年11期)2018-08-04
消费导刊(2018年8期)2018-05-25
燕山大学学报(2015年4期)2015-12-25
北京航空航天大学学报(2014年1期)2014-12-19
