
基于PPF-DVFB算法的压电柔性机械臂振动主动控制研究*
2015-11-03 07:17马天兵
组合机床与自动化加工技术 2015年1期
马天兵,熊 能,杜 菲
(安徽理工大学机械工程学院,安徽淮南 232001)
基于PPF-DVFB算法的压电柔性机械臂振动主动控制研究*
马天兵,熊 能,杜 菲
(安徽理工大学机械工程学院,安徽淮南 232001)
柔性机械臂的振动已经严重影响其定位精度和工作效率,为此,以单关节柔性机械臂为研究对象,基于LabVIEW平台和压电技术运用PPF-DVFB的算法来进行柔性机械臂的振动控制。首先介绍了PPF-DVFB算法原理,然后详细地论述了实验过程。实验结果表明,PPF-DVFB算法能有效的控制柔性机械臂的前两阶模态振动,控制效果接近14dB,相对于PPF方法,改善近4.5dB。
柔性机械臂;振动控制;正位移反馈;速度负反馈;压电
0 引言
LQG、LQR、滑模变结构控制、独立模态空间控制(IMSC)、PPF和速度负反馈(DVFB)等方法被广泛采用于压电柔性结构的振动主动控制中。但由于LQG、LQR依赖于精确的数学模型而导致其应用变得复杂[1];变结构控制通常会在滑动平面原点附近产生高频颤动,影响其实际应用[2];IMSC虽具有物理概念清晰、易于实现的优点,但在多模态控制时,需要多个压电作动器[3];PPF算法具有简单易行、对溢出不敏感等优点[4],但是其补偿阻尼比存在两面性,鲁棒性与低阶模态的控制效果具有矛盾性[5];直接速度反馈方法具有无条件稳定性,但是容易出现控制溢出问题[6]。为了克服传统PPF算法的缺点,本文采用PPF和速度负反馈结合的方法,进一步提高系统阻尼,在对压电柔性机械臂的振动主动实验中发现,该方法具有较好的稳定性和控制效果。
1 PPF-DVFB算法原理
正位反馈控制(PPF)[7]的基本思想是采用位置测量、对位控制,将受控结构的位置坐标正反馈至控制器,同时将控制器的位置坐标正反馈给受控结构,达到抑制结构振动的目的[3]。根据文献[7]报道,含有低通滤波器的PPF-DVFB算法原理如图1所示。
其中:q和η分别是结构位移和补偿器的坐标,ζ和ζc分别是结构和补偿器的阻尼比,ω和ωc分别是结构和补偿器的固有频率,g为PPF算法反馈增益,u为激励信号,uPPF为PPF控制器输入到作动器的电压,uDVFB为DVFB控制器输入到作动器的电压,K为DVFB算法反馈增益,s为拉氏变换因子,τ为一正值。
2 结构参数确定
考虑到系统的振动能量主要集中在前几阶模态,本文选择机械臂的前两阶模态作为主要控制目标,当步进电机在驱动器的作用下以某恒定速度转动时,会激起机械臂振动。采集压电片的响应信号,进行傅里叶变换后得到幅频特性曲线,可观察出其一阶和二阶模态分别为15Hz、81Hz。然后采取文献[8]中的频率响应法,计算出系统前两阶模态阻尼比分别为0.09、0.04。最后根据文献[9]的方法,将前两阶模态正位反馈补偿阻尼比分别设为0.4、0.2。
3 柔性机械臂振动主动控制实验
3.1 实验系统搭建
实验装置由计算机、NI CRIO-9024系统、南京佛能公司的HVP-300B型功放、DT-2A型低通滤波器、300mm×52mm×1.5mm铝材机械臂、50mm×30mm× 0.2mm压电片、常州万泰公司的57BYG型步进电机及其控制系统组成,如图2所示。机械臂由步进电机驱动,由于步进电机扭转刚度远大于臂的刚度,边界条件近似为悬臂梁[3],则机械臂振动时其前两阶模态应变最大的位置在根部,于是将压电陶瓷(PZT)片同位粘贴在此位置。考虑到步进电机转动的连续性,尽量减小步进过程的波动性,实验用步进电机驱动器设为128分频(最大分频),步距角为1.8°,控制器驱动频率设为2500Hz。
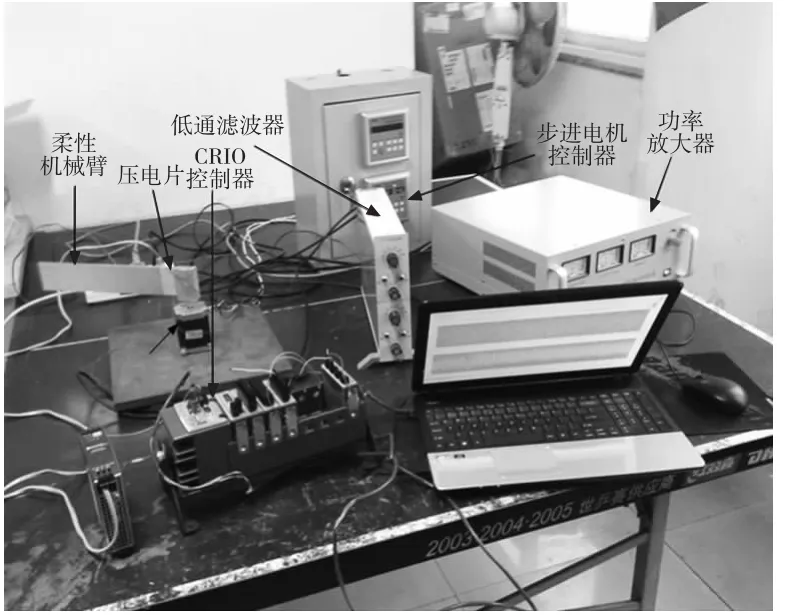
图2 机械臂振动控制实验照片
实验中对位粘贴一对压电片,其中一片作为传感器,另一片作为作动器,通过NI9229 AI卡采集压电传感片信号,然后送到CRIO系统,经过LabVIEW软件算法处理后,输出控制信号给NI 9263 AO卡,再经过低通滤波器(频率设为100Hz)后送到功率放大器的输入端,最后由功放驱动压电作动片来实现机械臂同位振动抑制。
3.2 软件程序编写
基于NICRIO平台,采用LabVIEW软件编写算法程序,使用扫描接口模式运行,控制循环时钟设为与扫描引擎同步,采样率设为2K。经多次实验确定,速度负反馈系数K设为0.05,正位反馈系数g取0.9,其它的模态参数设置参照第2节所述。考虑到输入输出会有时滞的影响,在软件程序里增加了延时模块,根据参考文献[10]中的方法计算补偿时间为0.0005s。由于AO卡的输出电压限为±10V,所以程序里增加了限幅信号。
3.3 实验结果与分析
图3显示了柔性机械臂在匀速驱动下2种不同控制方法的振动抑制效果,当控制电压幅值加到50V左右时,对于第一阶模态,PPF-DVFB的控制效果达到14dB,而PPF为9.5dB;第二阶模态,PPF-DVFB的控制效果达到13.7dB,而PPF为9.3dB。可见,采用PPF-DVFB算法的控制效果要明显优于PPF算法,尤其是在其它非模态频率处。这是因为PPF控制器的每个补偿器都是针对特定模态设置的,即只对特定频率有效果,而DVFB对每一个频率成分都有衰减作用,控制效果必然更好[7]。图3b显示出,除被控模态频率外,还存在其它的模态谐波频率,这主要是由于电机的步进作用一定程度上引起了机械臂的谐波振动现象,PPF算法在这些频率点的控制效果较差,但PPF-DVFB方法仍能对谐波起到了较好的抑制作用。

图3 机械臂振动的时域、频域响应
4 结束语
本文针对压电柔性机械臂前两阶振动模态,分别采用PPF算法和PPF-DVFB算法来进行振动控制。实验结果表明,PPF-DVFB算法无论是在模态频率还是在其它谐波频率处,相对于传统的PPF算法具有更好的控制效果,从而可进一步提高柔性机械臂的工作稳定性。
[1]王宗利,林启荣,刘正兴.压电智能梁的状态相关LQR振动控制[J].上海交通大学学报,2001,35(4):503-508.
[2]邱志成.柔性机械臂的变结构振动控制研究[J].动力学与控制学报,2007,5(1):62-67.
[3]邱志成,谢存禧,张洪华,等.压电柔性机械臂的主动振动控制研究[J].机器人,2004,26(1):45-48.
[4]Nima Mahmoodi S,Mehdi Ahmadian.Active vibration control with modified positive position feedback[J].Journal of Dynamic Systems,Measurement,and Control,2009,131(4):1-8.
[5]Song G,Schmidt SP,Agrawal B N.Active vibration suppression of a flexible structure using smart materialand a modular control patch[J].Proceedings of the Institution of Mechanical Engineers,Part G,2000,214(4):217-229.
[6]王波.点式压电智能结构振动控制方法改进的研究[D].重庆:重庆大学,2004.
[7]马天兵,裘进浩,季宏丽,等.振动控制中的局部应变补偿和改进PPF算法[J].华南理工大学学报,2012,40(5):41-45.
[8]熊诗波,黄长艺.机械工程测试技术基础[M].北京:机械工业出版社,2009.
[9]Rew Keun-Ho,Han JAE-Hung,Lee In.Multi-modal vibration control using adaptive positive position feedback[J].Journal of Intelligent Material Systems and Structures,2002,13(1):13-22.
[10]任昊轶.压电智能悬臂梁的主动控制方法研究[D].大连:大连理工大学,2012.
(编辑 李秀敏)
Study on Active Vibration Control of Piezoelectric Flexible Manipulator Based on PPF-DVFB Algorithm
MA Tian-bing,XIONG Neng,DU Fei
(School of Mechanical Engineering,Anhui University of Science&Technology,Huainan Anhui232001,China)
The positioning accuracy and work efficiency of flexible manipulator is seriously affected by its vibration.Therefore,vibration control of single joint flexible manipulator is studied by using PPF-DVFB algorithm based on LabVIEW and piezoelectric technology.Firstly,the PPF-DVFB algorithm principle is introduced.Then,the experiment process is discussed in detail.Experimental result shows that PPF-DVFB algorithm can effectively control the first two modal vibration of flexible manipulator.The control effect is close to 14 dB and improved nearly 4.5 dB compared with PPF algorithm.
flexible manipulator;vibration control;positive position feedback;direct velocity negative feedback;piezoelectric
TH166;TG506
A
1001-2265(2015)01-0091-02 DOI:10.13462/j.cnki.mmtamt.2015.01.025
2014-04-12
国家自然基金资助项目(51305003);安徽省高校优秀青年人才基金重点资助项目(2012SQRL045ZD);安徽理工大学大学生科研项目(ZZ1303)
马天兵(1981—),男,安徽庐江人,安徽理工大学副教授,南京航空航天大学博士,研究方向为振动控制,(E-mail)dfmtb@163.com。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
机械工业标准化与质量(2022年9期)2022-09-30
昆明医科大学学报(2022年3期)2022-04-19
石油沥青(2021年5期)2021-12-02
陶瓷学报(2021年4期)2021-10-14
陶瓷学报(2021年3期)2021-07-22
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
陶瓷学报(2020年6期)2021-01-26
文化创新比较研究(2020年7期)2021-01-13
铜仁学院学报(2018年6期)2018-07-05
