大侧向加速度下汽车驾驶员建模研究
2015-12-07 02:54闫晓晓杨建森黄森仁
重庆理工大学学报(自然科学) 2015年4期
闫晓晓,杨建森,黄森仁,李 飞
(中国汽车技术研究中心,天津 300300)
经研究发现,驾驶员的行为特性是影响汽车主动安全性的重要因素。建立能准确反映客观实际情况的驾驶员模型对车辆操纵稳定性以及主动安全性研究有着至关重要的作用。线性驾驶员模型在线性区内能够较好地跟踪路径轨迹,但在大侧向加速度下该模型就无法准确地跟踪路径轨迹[1]。本研究在基于“预瞄-跟随”理论的驾驶员模型的基础上,对大侧向加速度下的驾驶员模型提出了修正,明显改善了大侧向加速度下驾驶员模型的路径轨迹跟踪效果。
1 线性区驾驶员模型
基于“预瞄-跟随”理论的驾驶员模型[1-3],根据预期道路和预期道路上的车速信息,通过引入汽车姿态和速度信息的反馈,计算出驾驶员所需要施加到汽车上的油门开度和方向盘转角。驾驶员模型描述如图1所示。

图1 驾驶员模型描述
1.1 驾驶员预期道路与车速描述
驾驶员模型的输入为“预期车速”和“预期道路”。为了可以统一表示“预期车速”和“预期道路”,可以采用离散的数表方法,而不使用数学公式来描述(图2和表1)。可以用“大地坐标系”中道路中心线上的一系列有序的点来描述驾驶员预期的轨迹。鉴于在道路上还有预期行驶车速的要求,道路中心线上的一系列点除了含有位置特性外,还需要含有驾驶员期望的速度特性。因此,所有点可用(Xi,Yi,Ui)来表达,其中:(Xi,Yi)描述了驾驶员需要跟踪的期望道路中心线坐标;Ui描述了在(Xi,Yi)位置时驾驶员期望到达的车速。i=1为道路的起始点,i=n为道路的终结点。在道路的曲率比较小时,表示道路的点应取得稀疏一些;当道路的曲率变得较大时,也就是在比较急的弯道上,表示道路的点需要取得紧密一些[2]。通过以上输入,本研究所建驾驶员模型可确定合适的油门开度~α和方向盘转角δsw,使车辆的真实输出能跟随驾驶员期望的速度和道路轨道。

图2 预期道路和预期车速的描述

表1 驾驶员模型的预期道路与车速
1.2 基于加速度反馈的方向控制驾驶员模型
该驾驶员模型分为2部分:一部分是决策统一油门的纵向控制驾驶员模型;一部分是决策方向盘转角的方向控制驾驶员模型。方向控制驾驶员模型是基于加速度反馈的,模型的输入包括汽车的状态反馈和驾驶员预瞄前方点的轨迹。这些输入经过加速度反馈环节、反应滞后环节和神经滞后环节后,得到驾驶员模型输出的方向盘转角。基于侧向加速度反馈的方向控制驾驶员模型如图3 所示[3]。

图3 基于侧向加速度反馈的方向控制驾驶员模型
模型中的侧向加速度对方向盘转角的增益可以通过线性二自由度车辆模型在线性区内的关系公式进行辨识,如式(1)所示。

1.3 任意道路下预瞄点搜索算法
在任意道路下建立基于侧向加速度反馈的方向控制驾驶员模型时,需要在车辆行驶的任意位置下得到在车辆坐标系下预瞄点与汽车的侧向偏差 Δfp。
如图4所示,期望的道路轨迹可以用绝对坐标系中道路中心线上的一组坐标点来描述。(X(i),Y(i))代表绝对坐标中道路中心线上第i个点的坐标,(x(i),y(i))代表上述点在车辆坐标系中的坐标。两者可以利用如下的坐标变换进行换算:

其中:ψ表示为在大地坐标系下汽车的航向角;i表示第i点。

图4 任意道路下的预瞄点搜索算法
假设汽车的当前位置在大地坐标系中的坐标为(X0,Y0)。要计算得到当前Δfp的数值应经过2步:第1步,在描述期望路径的表格中找出在车辆当前位置后面最近的点,用来作为下一次搜索的起点;第2步,需要确定2个点,这2个点把预瞄点夹在中间,然后利用线性插值计算预瞄点坐标[4]。
假设s0为上次搜索所设置的当前这次搜索的起始点。本研究假设车速始终是正值(暂时不考虑倒车工况),则x(s0)一定是负值。从s0点开始,在期望路径的数表中寻找到一个能够满足式(3)的点。

其中s是数表中满足上述公式条件的点,则该点即是车辆当前位置后面的最近点,并且将该点储存为下一次搜索的起始点。
下一步查找一个期望轨迹中在预瞄点后面的最近的点,要求其满足式(4)。

式中m是数表中满足上述公式条件的点。那么,预瞄点P的位置认定是在点m和点m+1之间。因此Δfp可以通过点m与点m+1在车辆坐标系中线性插值的方法计算得出,见式(5)。

以上所述为一次搜索的全过程。当车辆运动至另一个新的位置时,需要更新搜索起始点和车辆的位置,继续完成新一次的搜索,从而更新Δfp。
1.4 任意车速和道路跟随驾驶员模型
在建立纵向控制驾驶员模型时,通过导入纵向加速度的反馈因素,并通过PID控制策略决策理想油门开度,公式表达为:

其中Kp,Kd和Ki为PID控制策略中的重要参数。这3个参数需在计算时作调整,但PID控制一般会具备很强的鲁棒性,在取值范围较大时也能够使控制模型获得良好的收敛效果。
把任意的道路跟随控制和速度跟随控制进行综合,形成如图5所示的任意速度和道路跟随控制的驾驶员模型。需要特别注意的是,速度控制和方向控制的主要耦合作用是来自车速对侧向车辆动力学特性的影响。除此之外两者的耦合作用是非常小的,基本可以理解为是解耦的[5]。
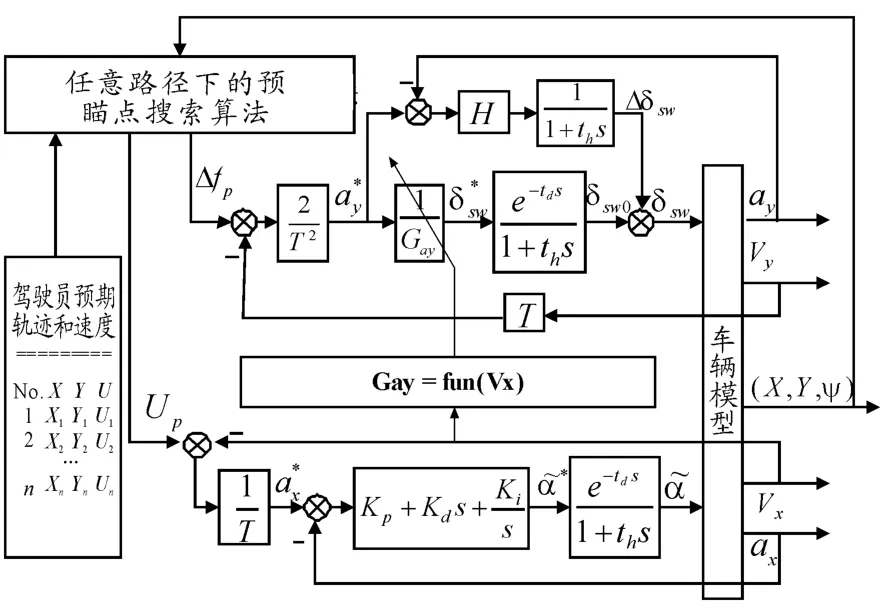
图5 任意速度和道路跟随控制的驾驶员模型
图6为紧急双移线试验道路[6],其中:S1=S5=18.288 m;S2=S3=S4=12.192 m;变道距离D=4.572 m;标杆宽度B=3 m。该试验道路可由有经验的驾驶员以较高车速通过,以此模拟车辆临界侧滑和侧翻等极限工况,从而更加全面地实现汽车操纵稳定性的实车试验。该试验工况对驾驶员的要求较高,因此该极限工况道路试验测试驾驶员模型可以更加全面地考察驾驶员模型在复杂行驶工况下的轨道跟随能力。图7是在车速为80 km/h工况线性区内的驾驶员模型仿真结果。从图中可以看出,车辆的运行轨迹会碰到标杆。

图6 紧急双移线试验道路

图7 线性驾驶员模型紧急双移线仿真结果
2 大侧向加速度下驾驶员模型的修正
针对大侧向加速度线性区驾驶员模型无法很好地跟踪道路轨迹的问题,本研究对该方向控制驾驶员模型提出两点修正:侧向加速度对方向盘转角稳态增益Gay的修正和驾驶员预期轨道的修正[7]。
2.1 侧向加速度对方向盘转角稳态增益Gay修正
Gay是利用线性二自由度车辆模型推算的,因此在大侧向加速度下的非线性区内就不成立了。
本研究采用前后轴侧偏角作为反馈进行修正,修正的方向控制驾驶员模型如图8所示[8-10]。将前轴侧偏角α1和后轴侧偏角α2正切值之差的绝对值乘以修正系数K后与1相加作为驾驶员输入方向盘转角的修正系数。可通过仿真对修正系数K进行优化,选出最优值。
2.2 驾驶员预期轨道修正
由图7可以看出,在大侧向加速度下的非线性区内驾驶员预期轨道选取标杆的中心线作为预期轨道,驾驶员转动方向盘稍晚,车辆反应滞后碰到标杆。在真实情况下,驾驶员在多次经过同一轨道时会进行学习,通过调整自己的预期轨道,从而较好地通过该路线[11-12]。方向控制驾驶员模型也应该具备自适应调整预期轨道的功能,通过调整预期轨道,使该方向控制驾驶员模型具有较好的跟随精度和通过性。

图8 Gay修正后的方向控制驾驶员模型
3 仿真结果
针对上面对大侧向加速度线性区驾驶员模型的两种修正方法分别进行车速为80 km/h的紧急双移线仿真,仿真结果如图9所示。
从仿真结果中可以看出:侧向加速度对方向盘转角稳态增益Gay的修正对在该紧急双移线工况下的车辆通过性稍有改善,但改善程度非常有限;而驾驶员预期轨道修正对在该紧急双移线工况下的车辆通过性改善非常明显,车辆可以顺利通过。

图9 修正后驾驶员模型紧急双移线仿真结果
4 结论
1)侧向加速度对方向盘转角稳态增益Gay的修正对在紧急双移线工况下的车辆通过性有一定的改善,但不明显。
2)驾驶员预期轨道修正能够较好地改善车辆在紧急双移线工况下的通过性。
3)如何让驾驶员模型自动辨识和修正驾驶员预期轨道是下一步研究的重点。
[1]Charles C M.Understanding and Modeling the Human Driver[J].Vehicle System Dynamics,2003,40(1/2/3):101-134.
[2]Ding H,Guo K,Wan F,et al.An Analytical Driver Model for Arbitrary Path Following at Varying Vehicle Speed[J].Int J Vehicle Autonomous System,2007,5(3/4):204-218.
[3]管欣,张立存,高振海.驾驶员确定汽车预期轨迹的网格式优化模型[J].中国机械工程,2006,17(15):1641-1644.
[4]李飞.轿车转向节耐久性寿命预测研究[D].长春:吉林大学,2010.
[5]丁海涛,郭孔辉,李飞,等.基于加速度反馈的任意道路和车速跟随控制驾驶员模型[J].机械工程学报,2010,46(10):116-120.
[6]ISO 3888- 2:2002.Road vehicles-Test procedure for a severe lane-change manoeuvre Part 2:Obstacle avoidance[S].
[7]郭孔辉.汽车操纵动力学[M].长春:吉林科学技术出版社,1991:526-531.
[8]段立飞,高振海,王德平.驾驶员对汽车方向的自适应控制行为建模[J].机械工程学报,2011,47(8):121-125.
[9]王玉海,宋健,李兴坤.驾驶员意图与行驶环境的统一识别及实时算法[J].机械工程学报,2006,42(4):206-212.
[10]管欣,崔文锋,贾鑫.车辆纵向速度分相控制[J].吉林大学学报:工学版,2013,43(2):273-277.
[11]管欣,张立增,贾鑫.驾驶员方向控制模型圆弧式预瞄算法的研究[J].汽车工程,2012,34(12):1062-1064.
[12]Guan Hsin,Gao Zhenhai,Guo Konghui,et al.A Driver Direction Control Model and Its Application in the Simulation of Driver-vehicle-road Closed-loop System[C]//SAE Paper 2000-01-2184.
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
北京航空航天大学学报(2021年4期)2021-11-24
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
摄影之友(影像视觉)(2017年1期)2017-07-18
通信电源技术(2016年1期)2016-04-16
制导与引信(2016年3期)2016-03-20
汽车文摘(2015年11期)2015-12-02