
低分辨雷达的目标分类识别研究∗
2016-01-15 09:03宋新景
雷达科学与技术 2016年3期
宋新景
(1.中国电子科技集团公司第三十八研究所,安徽合肥230088;2.孔径阵列与空间探测安徽省重点实验室,安徽合肥230088;3.智能情报处理重点实验室,安徽合肥230088)
0 引言
分类识别技术是雷达当今和未来发展的重要需求,同时也是四代雷达关键技术之一。直升机、螺旋桨和喷气式飞机在现代战争中各自承担着重要的作战任务,因此,研究对这三类飞机目标的分类,对防空预警具有重要的意义。
本文从模式识别角度给出雷达目标识别流程框图,以及目标识别对雷达设计需求。详细介绍杂波抑制的处理方法,利用幅度调制特征和频域熵特征实现喷气式飞机、螺旋桨飞机和直升机目标分类的方法。
1 目标分类识别过程
从模式识别角度理解雷达目标分类识别问题,分为训练过程和测试过程。训练过程:对接收到的回波复包络信息进行预处理,有效抑制地物杂波对目标的检测;进而提取时域或频域的特征,得到特征向量,然后训练分类器模型。测试过程:执行同样的操作,利用训练好的分类模型进行预测分类结果。图1给出了雷达目标分类识别的流程框图。下文就每个模块展开论述。

图1 目标分类识别的流程图
2 雷达设计需求
2.1 所需的最小脉冲重复频率
脉冲重复频率(PRF)决定了采样速率,所需的最小取样速率必须满足奈奎斯特速率以避免频率混叠。对于实际的直升机,它们的叶尖速度范围为200~230 m/s。对于米波波段,230 m/s的叶尖速度可以产生{fd}max=460 Hz的多普勒频移。因此,对于一个悬停的直升机,所需的最小采样速率为2×{fd}max=920 Hz。如果直升机有径向速度100 m/s的平移运动,则直升机的最大多普勒频移为660 Hz,所需的最小采样速率为1 320 Hz[1]。
在雷达设计时,须满足

式中,V1为叶尖速度,V2为平动径向速度。
2.2 所需的最小积累脉冲数
常规雷达频率分辨率为

式中,N为驻留脉冲数。
区分两类不同的飞机目标:


工程实践中,考虑一定的余量,可得

3 杂波抑制
地杂波形成的目标检测盲区会导致杂波被当作目标来检测,形成大量的虚假目标。对这一问题,在特征提取前先进行杂波抑制,避免将地杂波统计。在距离多普勒(Range Doppler,RD)谱上获取地杂波抑制的频率范围;应用Clean算法,先对通道时域数据进行地杂波抑制,然后进行各项特征提取。
3.1 Clean算法
Clean算法[2]是一种基于FFT的快速谱估计算法。该算法的要求是:组成信号时域序列的各分量信号的持续时间长度都与进行傅里叶变换处理的长度相同。这一点杂波信号模型无疑是能够满足的。针对复正弦信号分量组成的杂波模型,提取杂波信号能量的计算方法[3]为:
对信号的时域序列S(n)作FFT,得到S(ω),求取S(ω)落在杂波频率范围内的最大极大值点,该极值点所对应的幅度、相位和频率分别为第1个分量信号的参数估计,即

第1个被提取的杂波分量可以写为

将该分量从原时域序列中减去,提取该分量信号能量,即

对剩余信号Sr(n)重复上述过程,直到满足收敛条件。进行杂波抑制的目的是使杂波区域内的能量不被当作目标检测出来,因而只要杂波区域内的最大极大值点的功率小于平均噪声功率,即可认为杂波抑制完成。事先求取平均噪声功率,通过计算杂波区域内最大极值点的功率设定收敛条件。
3.2 杂波抑制处理结果
对于杂波频率范围内的极大值点,利用复正弦信号作为模型,利用Clean算法对模型参数进行估计,之后在信号的时域序列中将该信号模型的估值减去,从而抑制掉频带内所有极大值点对应的频率分量,即提取该分量的信号能量。剩余能量的信号即为杂波抑制后的时域序列。
给出Clean算法得到的杂波抑制结果,图2~4给出了杂波抑制前后3类飞机的频谱图。从图(b)上可以看出杂波能量明显被抑制掉,甚至远低于背景噪声功率,因而不会被当作目标检测出来。
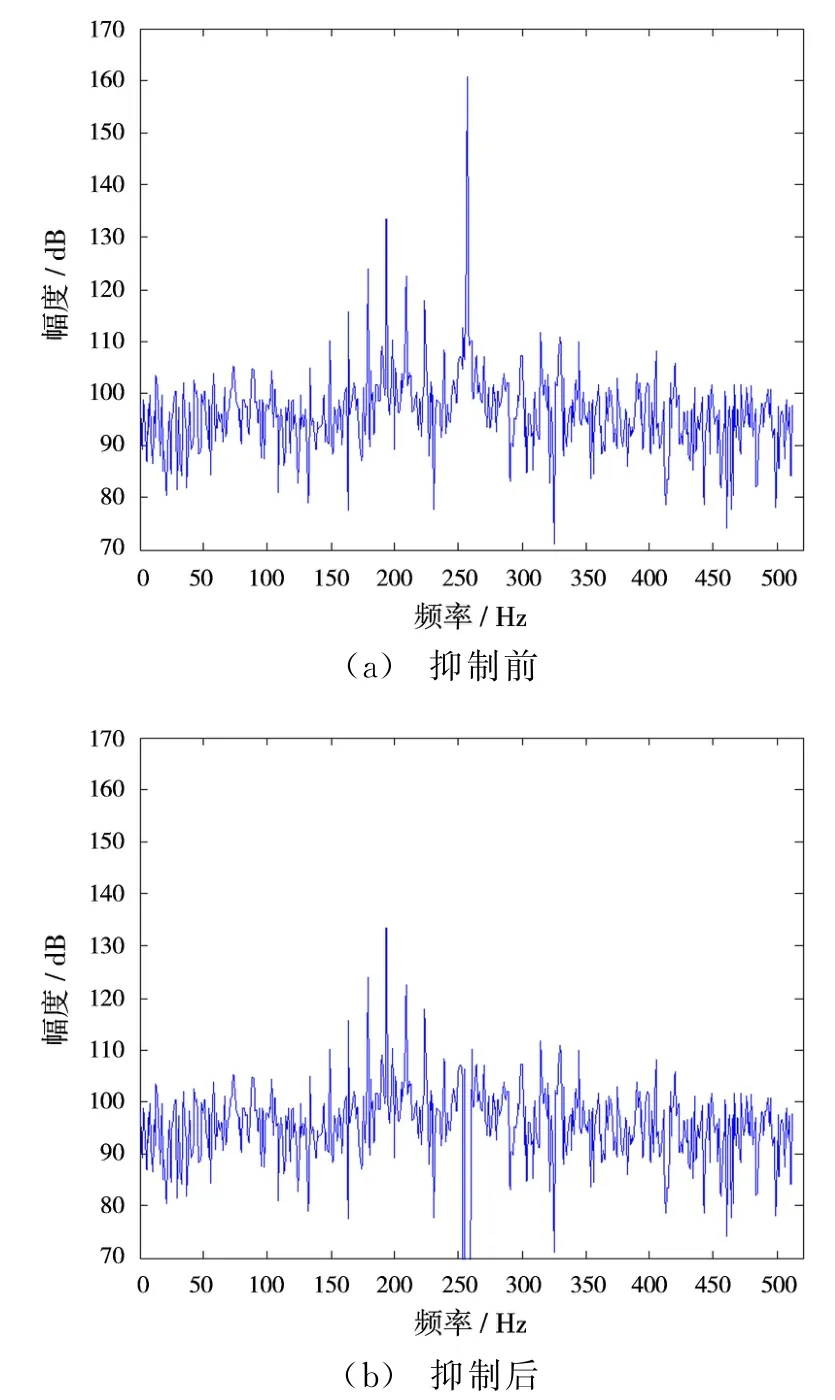
图2 直升机杂波抑制前后频谱图

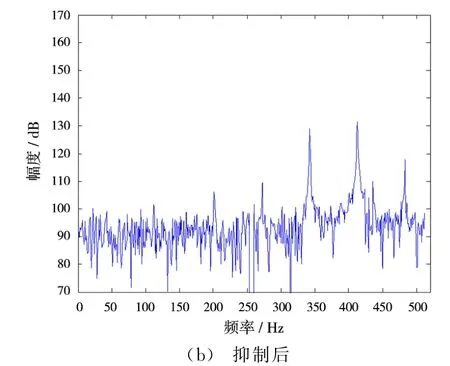
图3 螺旋桨杂波抑制前后频谱图

图4 喷气式杂波抑制前后频谱图
4 特征提取与分析
4.1 幅度偏差系数
幅度偏差系数定义为

式中,¯a为幅度均值,σa为方差。其值越大,表明回波幅度波动越大,旋转部件在飞机目标的机构中是显著的,反之表明回波以平稳的机身分量为主。
4.2 频域熵
频域熵特征定义如下:

式中,p(n)为s(n)模一归一化信号波形:

回波归一化的目的是为了消除回波散射强度对特征的影响[4]。
频域熵特征反映回波能量的集散程度,其值越大,说明回波能量分布越离散;其值越小,说明回波能量分布越集中。对于飞机目标,旋转部件的调制作用越强,调制频谱能量分布越分散。3类飞机中,直升机旋翼调制作用最明显,机身较小,调制分量引起的能量离散最大;喷气式飞机目标的旋转部件最小,机身相对较大,调制分量引起的能量离散最小;螺旋桨飞机介于两者之间。
4.3 多普勒域曲线积分
基于喷气式飞机、螺旋桨飞机、直升机的多普勒域图形的差异,采用多普勒域曲线积分可以获得曲线与坐标轴的面积,该值大致反映目标反射回波的总能量的大小,其定义如下:

式中,d I为多普勒域曲线积分值,xi为多普勒域幅度值。
在相似的回波采集情况下,由于飞机外形的差异性,喷气式飞机的多普勒积分值应为最大,螺旋桨次之,直升机最小。
4.4 特征提取结果
训练集样本特征分布如图5所示。
5 分类器训练
特征提取后进行分类识别,本文采用SVM分类器。SVM分类器的优点是泛化能力较强,收敛速度较快,且对小样本训练效果也较好[5]。核函数采用高斯核函数。

图5 训练集样本特征分布图
确定支持向量机最佳参数用以训练得到最优分类器,使之对未知样本同样具有良好的分类效果。本文采用交叉验证的方法训练分类参数,可以有效地确定最优参数,分类准确率有所提高。
5.1 交叉验证
交叉验证的思想是在给定的训练集中,用大部分样本进行建模,小部分样本用刚建立的模型进行预测,并求这个小部分样本的预测误差。重复这个过程,直到所有的样本都被预测了一次而且仅被预测了一次。
常用的交叉验证形式为K折交叉验证。初始训练集分割成K个子样本,一个单独的子样本作为验证模型的数据,其他K-1个样本用来训练。交叉验证重复K次,每个字样本验证一次,平均K次的结果,最终得到单一的估测。
5.2 参数选择
SVM高斯核函数两个重要的参数C和kerneloption,每个参数有对应的选择范围。这里选择训练集样本直升机、螺旋桨、喷气式,采用5折交叉验证。
经过多次遍历,选出最优参数,用所有样本得到分类模型,并用训练集进行验证,训练集准确率为96.73%。
6 分类结果分析
本文采用的是对直升机、螺旋桨和喷气式三类飞机的实测数据。实验中,数据集进行归一化后,构成训练和测试样本集,支持向量机部分采用高斯核函数,其参数C和kerneloption由交叉验证决定,选取最佳目标识别率对应的参数。预测结果如表1所示。

表1 3类飞机分类结果
从表1可以看出,螺旋桨和直升机的分类效果较差。训练集中直升机、螺旋桨只有一个姿态下的数据,测试集和训练集姿态不同,样本差别较大,同时样本数量也较少,所以直升机和螺旋桨飞机识别效率低下。
7 结束语
本文从模式识别角度划分雷达目标识别问题,在特征提取前进行预处理,抑制杂波影响,提取频谱幅度的相关特征。分类器模型训练过程采用交叉验证和参数选择相结合,针对训练样本获得最优分类面。窄带信号由于分辨率较低,适用对目标进行较粗的分类。
[1]CHEN V C.雷达中的微多普勒效应[M].吴顺君,杜兰,刘宏伟,译.北京:电子工业出版社,2013:92-109.
[2]邹虹.多分量线性调频信号的时频分析[D].西安:西安电子科技大学,2000.
[3]仇永斌,张宁,张树春.双基地高频地波雷达海杂波抑制[J].哈尔滨工业大学学报,2012,44(1):71-77.
CHOU Yongbin,ZHANG Ning,ZHANG Shuchun.Ocean Clutter Suppression for a Bistatic HF Ground Wave Radar[J].Journal of Harbin Institute of Technology,2012,44(1):71-77.(in Chinese)
[4]陈凤.基于HRRP和JEM信号的雷达目标识别技术研究[D].2009:123.
[5]易晓柯.支持向量机的全局局部特征融合目标识别[J].雷达科学与技术,2011,9(2):180-187.
YI Xiaoke.Target Recognition Based on Support Vector Machine(SVM)Features Fusion[J].Radar Science and Technology,2011,9(2):180-187.(in Chinese)
猜你喜欢
环球时报(2022-09-15)2022-09-15
军事文摘(2022年15期)2022-08-17
科学与信息化(2021年30期)2021-12-24
雷达与对抗(2020年2期)2020-12-25
舰船科学技术(2020年6期)2020-11-27
火控雷达技术(2020年2期)2020-10-16
航空发动机(2020年3期)2020-07-24
雷达与对抗(2020年1期)2020-06-05
中学科技(2017年10期)2017-11-04
海峡姐妹(2015年3期)2015-02-27
