
基于小波神经网络的感应电机直接转矩控制
2016-01-25 05:53王旭红
电力科学与工程 2015年12期
王 亮,王旭红
(长沙理工大学电气与信息工程学院,湖南长沙410004)
基于小波神经网络的感应电机直接转矩控制
王亮,王旭红
(长沙理工大学电气与信息工程学院,湖南长沙410004)
摘要:为了改善感应电机传统直接转矩控制(DTC)的性能缺陷,特别是低速状态下定子磁链畸变、定子电流谐波大、电磁转矩脉动大的缺点,提出一种基于小波神经网络(WNN)的新型非线性自回归移动平均模型(NARMA)。该模型根据H. Akaike的最终预测误差(FPE)准则确定WNN模型中所需的最佳小波个数。小波神经网络有很强的自学习能力,经过训练可很好地识别DTC系统,基于WNN的NARMA速度控制器可代替PI控制器控制感应电机的转矩。理论分析和仿真表明,该方法是非常有效的。
关键词:感应电机;直接转矩控制;小波神经网络;NARMA;FPE

0引言
20世纪80年代I.Takahashi和M.Depenbrok针对感应电机首次提出直接转矩控制(DTC)理论。不同于矢量控制,DTC系统控制结构简单,具有优良的动静态控制性能和调速效果[1,2],广泛应用于工业领域。然而传统DTC存在不足之处,电机在低速运行时转矩、磁链脉动大,传统的PI调节器不能提供良好的控制要求[3]。
多年来,国内外学者对此作了大量的研究。文献[4]提出了一种改进的基于空间矢量调制技术的直接转矩控制算法,但没有改变调节器的固有缺陷。文献[5]提出了一种新型抗饱和(anti-windup)PI 控制器,仅针对非线性饱和特性的情况。文献[6]提出了模糊PI控制算法可自动调节PI参数,采用自适应滑模方法设计磁链观测器,但算法和设计比较复杂,有一定效果。文献[7~8]采用了神经网络来处理DTC复杂计算的控制策略,缩短了计算时间,具有一定容错能力。文献[9]提出了一种基于电压和电流模型的新型混合模型定子磁链观测器,可解决电压模型观测器启动困难、电流模型观测器控制精度低的问题,但定子磁链仍有较大畸变,转矩响应时间偏长。文献[10]采用模糊逻辑控制器来减少电磁转矩脉动。文献[11]采用高频信号注入的方法,改善了DTC-SVM在低速状态下的转矩和电流纹波,但对磁链是否存在畸变没有进行分析论证。
基于以上问题,本文提出一种基于WNN的新型非线性自回归移动平均模型(NARMA),以WNN控制器代替传统的PI控制器,直接控制电机转矩,可有效改善电机低速性能。WNN具有很强的学习能力,经过训练可很好地识别DTC系统。基于Matlab/Simulink的仿真结果表明,新方法能明显减小转矩、磁链脉动,稳定转速,且系统响应速度大大加快。
1 DTC控制策略
1.1 电磁转矩和定子磁链的计算
DTC方法的特点是利用空间矢量的分析方式,直接在定子静止坐标系下,通过传感器检测到的定子电流和定子电压,计算该坐标系下的定子磁链和电磁转矩。通过三相静止坐标到两相静止坐标下的变换,可得到α-β两相坐标下感应电机动态数学模型:
(1)

(2)

(3)
式中:Ua,Ub,Uc为三相定子相电压;Isa,Isb为定子相电流;Usα,Usβ;Isα,Isβ;ψsα,ψsβ分别为α-β坐标系下的定子电压、电流和磁链;φ是α轴和β轴上定子磁链之间的夹角;Te是电机转矩;p是电机磁极对数。
1.2 DTC控制策略

其控制器输出原则分别为:

图1 采用小波神经网络的DTC系统图

(4)

(5)
式中:εψ,±εT分别为磁链、转矩滞环调节器容差上下限;ψQ,TQ为控制器的输出信号;Δψ,ΔTe分别为磁链、转矩差值。根据空间电压矢量交轴分量的变化规律可将定子磁链角度范围平均分成6个扇区S(K),每个扇区60°,如图2所示。作用于逆变器的电压矢量可以通过查表进行最优选择,如表1所示。

图2 空间电压矢量及扇区分布图

ψQTQ1010-110-1S(1)V2V0V6V3V7V5S(2)V3V7V1V4V0V6S(3)V4V0V2V5V7V1S(4)V5V7V3V6V0V2S(5)V6V0V4V1V7V3S(6)V1V7V5V2V0V4
2小波神经网络(WNN)模型
本文所用的WNN为紧致型WNN,即将神经网络隐节点的Sigmoid函数用小波函数来代替,相应的输入层到隐层的权值及隐层的阀值,分别由小波函数的尺度伸缩因子和时间平移因子所代替,如图3所示。神经元输出层激励函数为 purelin 函数,隐层选择满足允许条件的Morlet小波函数,它是高斯包络下的单频率复正弦函数,可定义为φ(t)=e-t2/2cosΩ0t,其中Ω0为常数,通常取1.75[14]。其微分方程为:
(6)
动态系统函数f(xk)可近似用小波函数和小波系数来表示,其一般表达式:



(7)



(8)
式中:a(尺度因子),b(平移因子)表示的是频率(或尺度)和时间(或空间)相对于输入矢量Xk的位置矢量;R是实数集;L(R)是指在R内的平方可积空间。
由式(7),(8)可以将该动态系统函数进一步近似表示如下:



(9)
式中:d0表示偏置量;Xk为输入矢量;wik表示输入层到隐层的权值;N是输入层节点个数;φ(·)是由小波基函数经过伸缩和平移得到的;Aik和Bi分别表示第i个隐层节点小波函数的尺度因子和平移因子;与ai和bi相对应。式(9)可以在小波神经网络中表示出来,如图3所示。
针对动态系统辨识过程,如何合理地确定隐层神经元个数(即M的大小)是一个关键点。本文在构建WNN模型时,根据文献[15]的FPE准则来选择隐层神经元个数M,在这种方法下可以定义误差函数表达式:

(10)

3基于NARMA-L2的小波神经网络控制器
将小波神经网络和反馈线性化理论结合起来,建立一个控制器。这种反馈线性化控制方法又称为非线性自回归移动平均控制方法,控制方法的第一步是辨识被控制的系统,通过训练一个神经网络来表示该系统的前向动态机制。一个用来代表一般的离散非线性系统的标准模型就是非线性自回归移动平均模型(NARMA)[16],可用下式表示:


(11)
式中:相关度为d(d≥2),即输入变量与输出变量之间有延时;u(k)表示系统的输入;y(k)表示系统的输出。NARMA模型在u(k)附近用泰勒公式展开并进行线性化,忽略高次项,可得NARMA-L2近似模型:




(12)
小波神经网络可以利用电机系统的输入和输出数据来近似表示h()和g(),如图4所示。
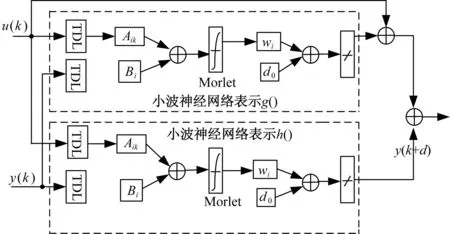
图4 基于NARMA-L2的小波神经网络辨识模型
WNN控制器模型是基于NARMA-L2的近似模型,该辨识模型的输出y(k+d)可由电机系统的参考值yr(k+d)所取代。故式(12)可表示为:

(13)
直接使用等式(13)会引起实现问题,因为基于输出y(k)的同时必须同时得到输入u(k)[17],所以采用下述模型:

(14)
等式(14)可直接用来建立WNN控制器,该控制器的结构如图5所示。

图5 NARMA-L2控制器的小波神经网络表示
4系统仿真及分析
4.1 小波神经网络训练
网络训练过程基于误差逆传播思想,按梯度下降法(即误差函数沿着负梯度方向下降)调整权值wi和小波参数Aik,Bi,并对WNN控制器进行离线训练。根据AFPE准则,隐含层的大小设为9,输入、输出时延设为3,2,经过样本训练使网络达到预定精度。训练完成后小波尺度因子Aik、平移因子Bi也得到确定,如图6,7,8所示。
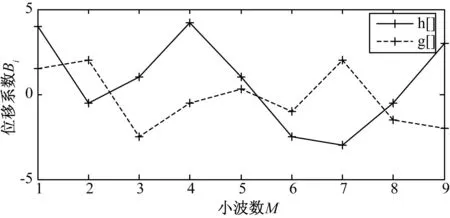
图8 h[],g[]的位移系数

图7 g[]的尺度系数
4.2 仿真分析
对于直接转矩控制低速研究是关键,本文主要研究该方法是否可抑制或改善传统DTC在低速状态下定子磁链畸变、定子电流谐波大、电磁转矩脉动大的缺陷。根据以上分析,由图1可在Matlab/Simulink环境下构建基于WNN的三相鼠笼异步电机直接转矩控制(近似圆形磁链)的仿真系统,仿真模型主要包括460V50Hz交流电源模块、三相交-直-交电压型逆变器模块、感应电机模块、DTC模块、WNN控制器模块、定子磁链控制模块、随机参考模块等,如图9所示。

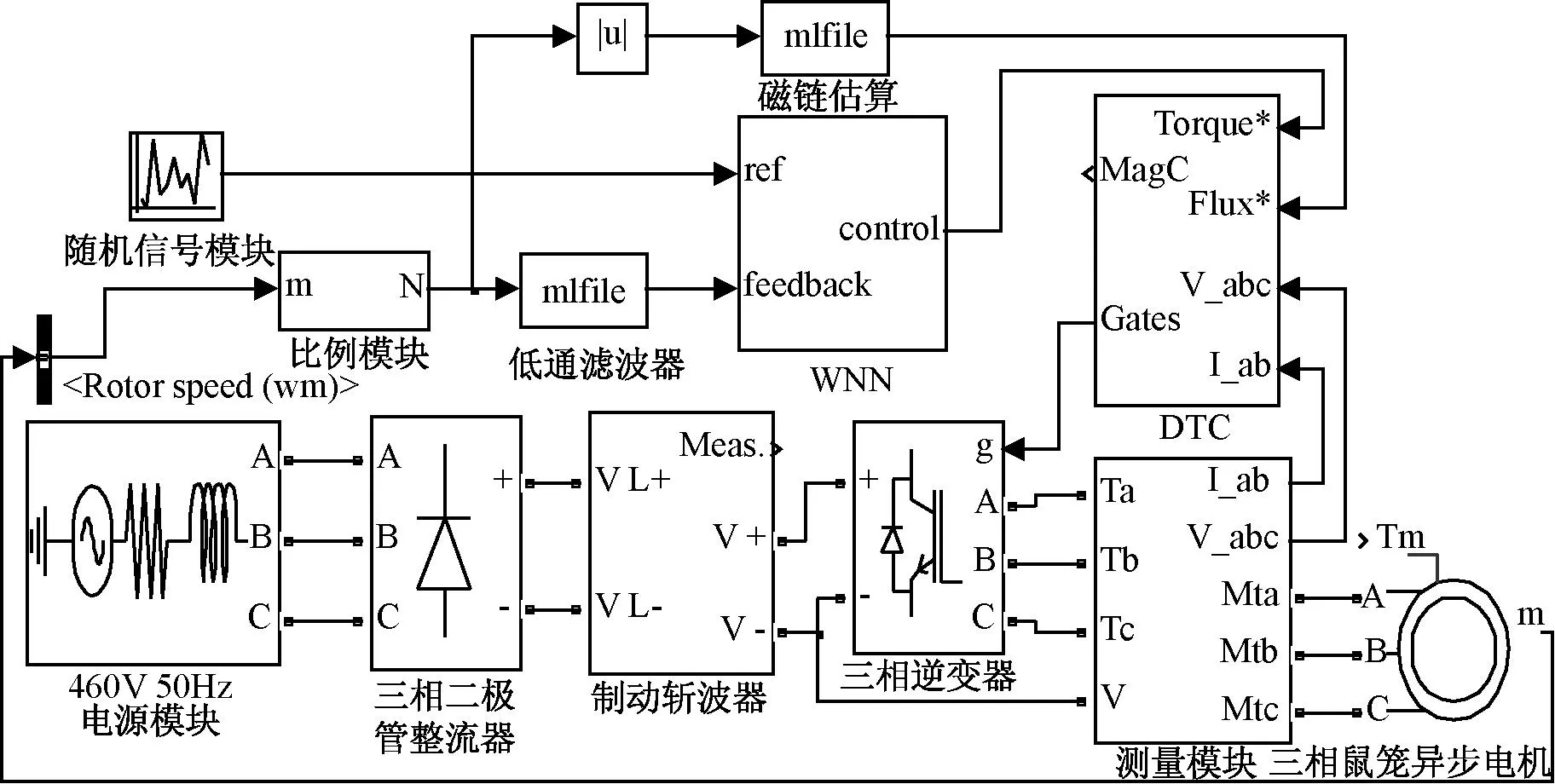
图9 基于WNN的DTC仿真模型
对比分析仿真结果可知:
(1)低速状态下定子磁链沿近似圆形磁链轨迹运动,且幅值恒定为给定幅值0.8 Wb,波动范围小于0.02 Wb,磁链畸变比传统DTC小。
(2)定子起始电流谐波减小,且能迅速稳定呈正弦分布;电磁转矩脉动减小,稳定后波动范围明显小于传统DTC波动范围。这说明在该控制方法下,DTC系统低速性能有明显的改善,稳态时脉动量很小。
(3)该系统的响应速度很快,当转矩达到给定值时,转速也急剧上升达到给定转速,改进的控制方法速度曲线优于传统控制方法,且速度无超调达到给定转速大概在0.08 s。

图10 两种方法下的DTC低速工况

仿真结果表明,本文提出的改进方法能够有效改善传统DTC系统的低速性能,进一步证明了该控制方法的正确性和可行性。
当负载转矩恒定,给定转速阶跃值为[40-100-20-80]r/min时,仿真结果如图11所示,电机转速跟随响应很快,表明WNN控制器性能较好,抗扰能力强。

图11 转速跟随情况
5结论
直接转矩控制因转矩动态响应快、鲁棒性好等优点被称为下一代交流电机最具竞争力、最优秀的控制方案。本文针对其低速性能缺陷,提出基于WNN的NARMA-L2控制模型对DTC系统进行辨识和控制。将小波分析与神经网络相结合,一方面充分利用了小波变换的时-频局部化特性,另一方面发挥了神经网络的自学习能力,具有较强的逼近能力与容错能力,因而对于复杂的非线性系统辨识与控制具有独特的优势。仿真结果证明该方法是可行的也是非常有效的,为以后更深入研究DTC在电机控制中的应用提供了新的思路和方法。
参考文献:
[1]Che Changjin,Qu Yongyin. Research on drive technology and control strategy of electric vehicle based on SVPWM-DTC [C]//2011 International Conference on Mechatronic Science,Electric Engineering and Computer. IEEE Conference Publications,2011:44-49.
[2]Sergaki E S,Moustaizis S D. Efficiency optimization of a direct torque controlled induction motor used in hybrid electric vehicles [C]//Electrical Machines and Power Electronics and 2011 Electromotion Joint Conference(ACEMP),2011 International Aegean Conference on IEEE Conference Publications,2011:398-403.
[3]Lai Yenshin,Chen Jianho. A new approach to direct torque control of induction motor drives for constant inverter switching frequency and torque ripple reduction [J]. IEEE Transactions on Energy Convers,2001,16(3):220-227.
[4] 张华强,王新生,魏鹏飞,等.基于空间矢量调制的直接转矩控 制算法研究[J].电机与控制学报,2012,16(6):13-18.
[5]张兴华,姚丹.感应电机直接转矩控制系统的“抗饱 和”控制器设计[J].电工技术学报,2014,29(5): 181-188.
[6]李瀛,胡立坤,卢子广,等.基于模糊PI和自适应滑模的异步电 动机DTC控制[J].微特电机,2015,43(3):73-77.
[7]刘星平,黄峰.基于神经网络的感应电动机直接转矩控制研究[J].电力电子技术,2012,46(8):100-102.
[8]刘伟,张鸿辉.基于神经网络的异步电机控制系统研究[J].制造业自动化,2013,35(9):46-48.
[9]刘洋,史黎明,赵鲁,等.一种基于混合型磁链观测器的异步电机直接转矩控制[J].电工技术学报,2015,30(10):157-163.
[10]Ab Aziz N.H,Ab Rahman A. Simulation on Simulink AC4 Model (200hp DTC Induction Motor Drive) using Fuzzy Logic Controller[C]// 2010 International Conference on Computer Applications and Industrial Electronics (ICCAIE 2010),2010:553-557.
[11]Masmoudi M,El Badsi B,Masmoudi A. DTC of B4-inverter-fed BLDC motor drives with reduced torque ripple during sector-to-sector commutations [J].IEEE Transactions on Power Electronics,2014,29(9):4855-4865.
[12]冯涛,陆华.永磁同步电机直接转矩控制及仿真[J].电机与控制应用,2013,40(6):27-31.
[13]李新宇,马明智,廖颜沛,等.异步电机直接转矩控制系统研究[J].电力科学与工程,2013,29(7):27-32.
[14]房国志,杨超,赵洪.基于 FFT 和小波包变换的电力 系统谐波检测方法[J].电力系统保护与控制,2012,40(5):75-79.
[15]Karimi M. A corrected FPE criterion for autoregressive processes[C]//15th European Signal Processing Conference (EUSIPCO 2007),2007:803-806.
[16]李国勇.智能预测控制及其MATLAB实现[M]. 北京:电子工业出版社,2010:151-159.
[17]张泽旭.神经网络控制与MATLAB仿真[M]. 哈尔滨: 哈尔滨工业大学出版社,2011:184-197.
Direct Torque Control of Induction Motor Based on Wavelet Neural Network
Wang Liang,Wang Xuhong(College of Electrical and Information Engineering,Changsha University ofScience & Technology,Changsha 410004,China)
Abstract:In order to amend the performance deficiencies of the traditional direct torque control (DTC), especially at low speeds, where there are some shortcomings such as stator flux distortion, large stator current harmonics and electromagnetic torque ripple, a novel model denoted as nonlinear autoregressive moving average (NARMA) model based on wavelet neural networks (WNN) is presented. According to the Akaike’s final prediction error (FPE) criterion, the optimum number of wavelets to be used in the WNN model is selected. The WNN has so strong learning ability as to be trained well to identify DTC system. The WNN controller with the structure of NARMA can be utilized as speed controller to control the torque of the induction motor instead of PI controller. Theoretic analysis and simulation show that the novel method is highly effective.
Keywords:induction motor; direct torque control; wavelet neural network; NARMA; FPE
作者简介:王亮(1990-),男,硕士研究生,研究方向为电机运行与智能控制,E-mail:619153616@qq.com。
基金项目:湖南省高校创新平台开放基金项目(14k001);湖南省科技厅科技计划项目(2015GK3018);长沙市科技项目(k1403041-11)。
收稿日期:2015-09-30。
中图分类号:TM343
文献标识码:ADOI:10.3969/j.issn.1672-0792.2015.12.002
