
大功率电动舵机系统仿真技术应用研究
2016-03-16 05:37姜见龙李文伟张金铎李鹏佳王洪生
导航定位与授时 2016年3期
姜见龙,李文伟,张金铎,李鹏佳,王洪生
(湖北三江航天红峰控制有限公司,湖北 孝感 432000)
大功率电动舵机系统仿真技术应用研究
姜见龙,李文伟,张金铎,李鹏佳,王洪生
(湖北三江航天红峰控制有限公司,湖北 孝感 432000)
随着导弹性能的不断提升,电动舵机系统的功率越来越高,研制风险也随之提高,因此对大功率电动舵机系统的精确仿真也日趋重要。基于Matlab及ADAMS仿真工具建立了某大功率电动舵机系统的机电联合仿真模型,并对系统的动态响应进行了仿真。与实测结果相比,该模型能够较为准确地仿真实际舵系统,对提高大功率电动舵机系统仿真结果的可信度具有积极意义。
大功率;电动舵机;仿真
0 引言
目前,随着导弹射程、速度、飞行高度及机动性的不断增加,电动舵机系统正在向输出力矩大、响应速度快、功率体积比高、全数字化方向发展[1]。随着航天产品性能的提升,舵机大功率化是一种必然的趋势。传统的直流有刷电机由于其换向电刷以及功率密度的限制,已无法满足航天大功率电动舵机的需求。随着稀土永磁材料以及数字控制技术的研究发展,无刷电机以其结构简单、转速高转矩大、可靠性好、寿命长、易于维护且功率密度高等优点使得大功率电动舵机飞速发展[2-3]。但大功率电动舵机的研制周期长、性能指标关联因素复杂、对传动系统的非线性环节敏感等特点使得研制风险大为提高。
近年来,仿真技术的发展为缩短系统设计周期、分析系统性能与可靠性提供了一条快捷有效的途径。同时通过仿真可模拟大功率舵机在多种工况下的响应情况[4]。但传统的通过模型简化及传递函数的仿真方式已无法满足大功率电动舵机系统详细仿真的需求。本文利用Matlab及ADAMS仿真工具建立了某大功率电动舵机系统的机电联合仿真模型:利用Matlab建立了无刷电机模型,对控制算法、调制方式、换向逻辑、限流保护等功能模块进行了详细建模;利用Adams实现机械传动部分的建模和创建多体动力学模型,并通过接口文件实现与Matlab /Simulink仿真环境的连接。对仿真数据与测试结果的对比分析结果表明,该仿真模型可有效地仿真控制系统中的各个单元模块,对缩短设计周期、减少系统研制成本是非常有效的。
1 系统模型分析
1.1 舵机系统工作原理
舵机系统一般由控制器和舵机组成,而舵机由伺服电机、减速器及角度反馈装置等组成。某大功率电动舵机系统方案采用 “DSP+CPLD”数字控制方式,舵机由4kW级直流无刷方波电机、齿轮副+滚珠丝杠副减速器以及精密角度传感器组成。舵机系统组成示意图如图1所示。
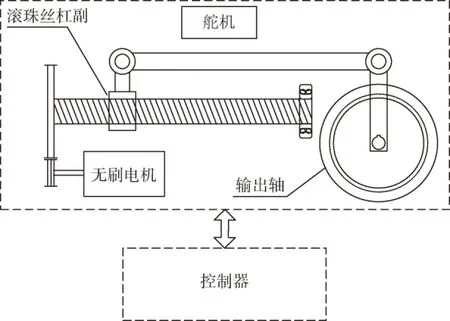
图1 舵机系统组成示意图Fig.1 Schematic diagram of actuator system
系统正常工作时,控制器接收弹载计算机发出的舵控指令信号,控制器接收并比较指令信号和角度传感器的反馈值,按照相应的控制算法计算出控制信号,该控制信号经功率放大驱动无刷电机的正反转带动减速器运动,直至角度误差信号满足系统的精度要求。
1.2 无刷电机与功率驱动器件仿真模型
无刷电机电压方程与转矩方程如式(1)、式(2)所示。
(1)
(2)
式中:Ls为电机定子绕组电感;Rs为定子电阻;ia,b,c为相电流;φa,b,c为反向电动势;vab,vbc为相间电压;λ为转子的磁通量幅值;ωr为转动角速度。
根据无刷电机的电压方程和转矩方程,利用Matlab中电气仿真库中的电机模型,通过参数设置反向电动势为梯形波,即可得到方波控制的直流无刷电机模型,该型号无刷电机的主要参数设置为:定子相绕组电阻0.345Ω,定子相绕组电感550μH,力矩系数0.082(N·m)/A。功率驱动模块选用高功率密度的IGBT模块,仿真时在电气仿真模块中调用,该型号IGBT的主要参数设置为:供电电压270V,管压降0.8V,导通时间0.095μs,关闭时间0.54μs。电机与功率模块的仿真示意图如图2所示。
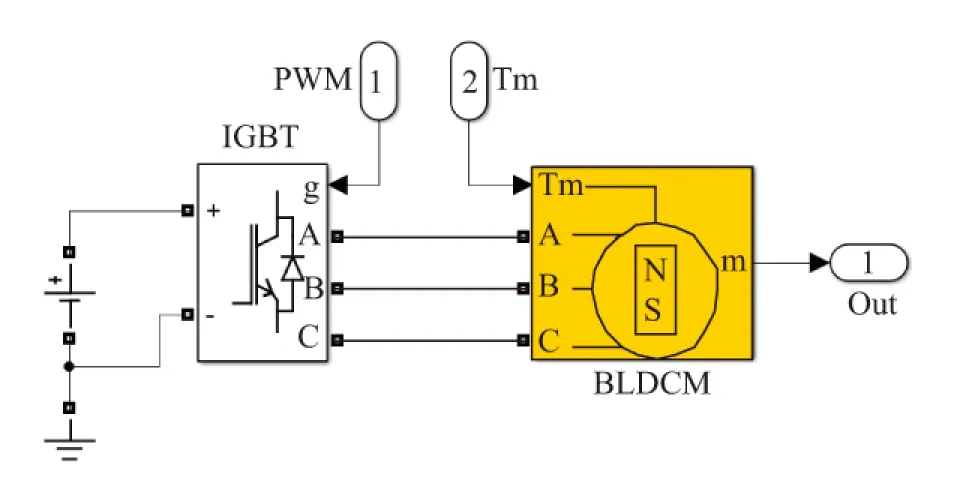
图2 电机与IGBT仿真模型Fig.2 Simulation model of motor and IGBT
图2中,IGBT模块根据输入的六路PWM信号对上下桥臂进行开通与关断处理,电机根据功率模块的电压信号旋转,实现转速与力矩信号输出,霍尔信号也随着电机旋转位置的不同发生相应变化。
某电机要求在负载为1.6N·m时输出转速不低于18000r/min,在负载为3.5N·m时输出转速不低于10000r/min,电机分别在空载1.1N·m、2.2N·m以及4N·m负载条件下进行仿真,仿真结果如图3所示。将仿真结果与测试数据进行对比分析,分析结果如表1所示。
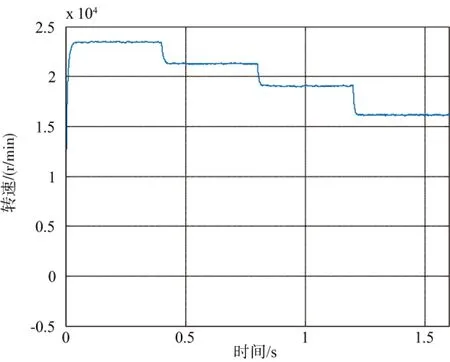
图3 不同负载下电机转速变化图Fig.3 Variation of motor speed under different load
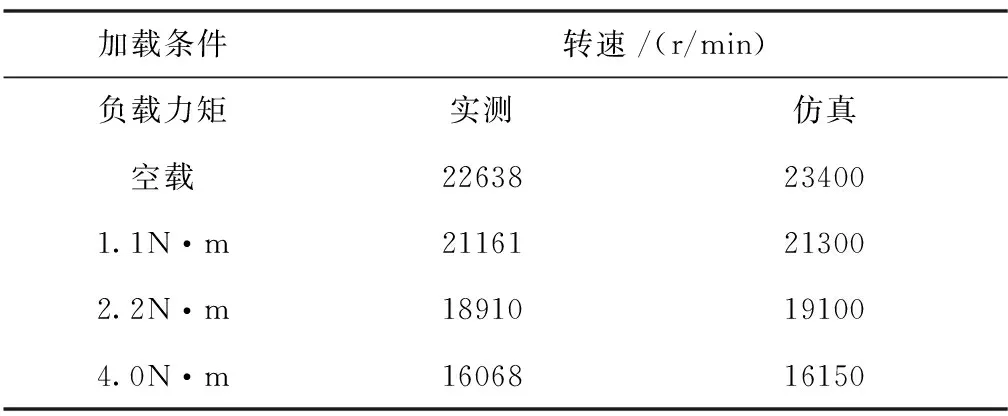
加载条件转速/(r/min)负载力矩实测仿真空载22638234001.1N·m21161213002.2N·m18910191004.0N·m1606816150
通过表1中的数据对比可知,无刷电机模型仿真得到的速度力矩值与电机实测值比较接近。
1.3 PWM调制模块
目前,直流无刷电机主流的调制方式有5种:PWM_ON型、ON_PWM型、HPWM_LON型、HON_LPWM型、HPWM_LPWM型。研究表明,采用PWM_ON调制方式(功率管在120°导通期间,前60°为PWM调制方式,后60°保持恒通)不仅可以减少对功率管的损耗,并且该调制方式在上下桥换向过程中相电流波动幅度相等且很小,对换相转矩脉动影响最小[5]。通过建立PWM调制模块模型,并使用M语言编程实现调制方式的仿真,如图4所示。具体的实现过程为电子换向模块根据输入的方向信号、霍尔信号以及PWM方波信号进行逻辑判断,三相霍尔信号的状态决定了电机某一相相角的前60°与后60°。在前60°范围内,开通相跟随PWM方波信号进行开通和关断;后60°范围,该相持续导通,不随PWM信号进行开通与关断。PWM_ON调制方式的实现波形如图5所示,给出了固定占空比信号下IGBT某一桥臂的控制信号,起始阶段,电机转速慢,单相工作持续时间较长;恒速阶段,工作时间恒定。
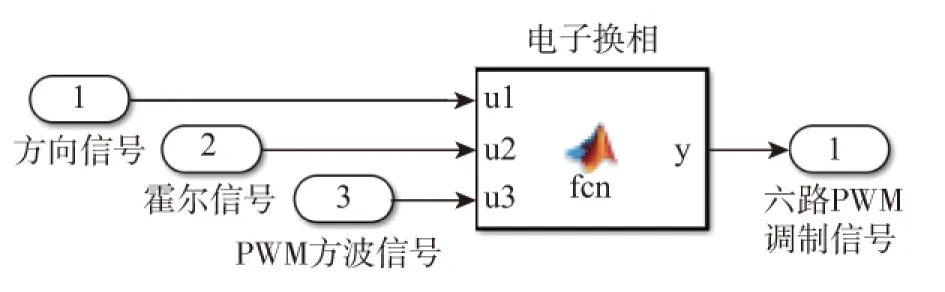
图4 PWM实现框图Fig.4 Function diagram of PWM
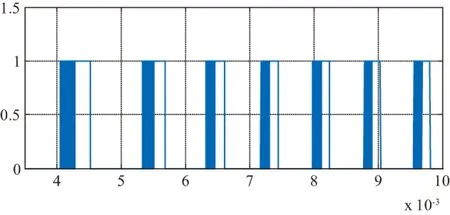
图5 PWM_ON波形图Fig.5 Waveform of PWM_ON
1.4 减速器模型
结构上,为了适应大功率电动舵机输出力矩的要求,选用滚珠丝杠副作为减速器。采用滚珠丝杠副减速装置,根据传动机构负载要求及经验,选取公称直径和导程,为了将滚珠丝杠副的直线运动转化为舵机轴的旋转输出,需增加曲柄、摇臂等结构部分[6],具体如图6所示。
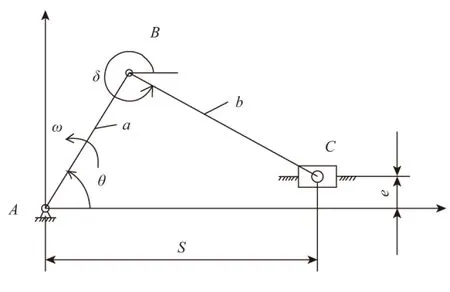
图6 传动机构示意图Fig.6 Schematic diagram of transmission mechanism
图6中θ为曲柄偏角,偏角范围为57°~123°,偏角为90°时为舵机零位;δ为连杆位置角,不考虑传动机构的间隙等非线性因素,得到δ与θ的关系如式(3)所示。
(3)
因此通过滚珠丝杠副的减速比i1即可得到系统的总减速比,如式(4)所示,取i1=500,则系统减速比i与舵轴输出角的关系曲线如图7所示。
(4)
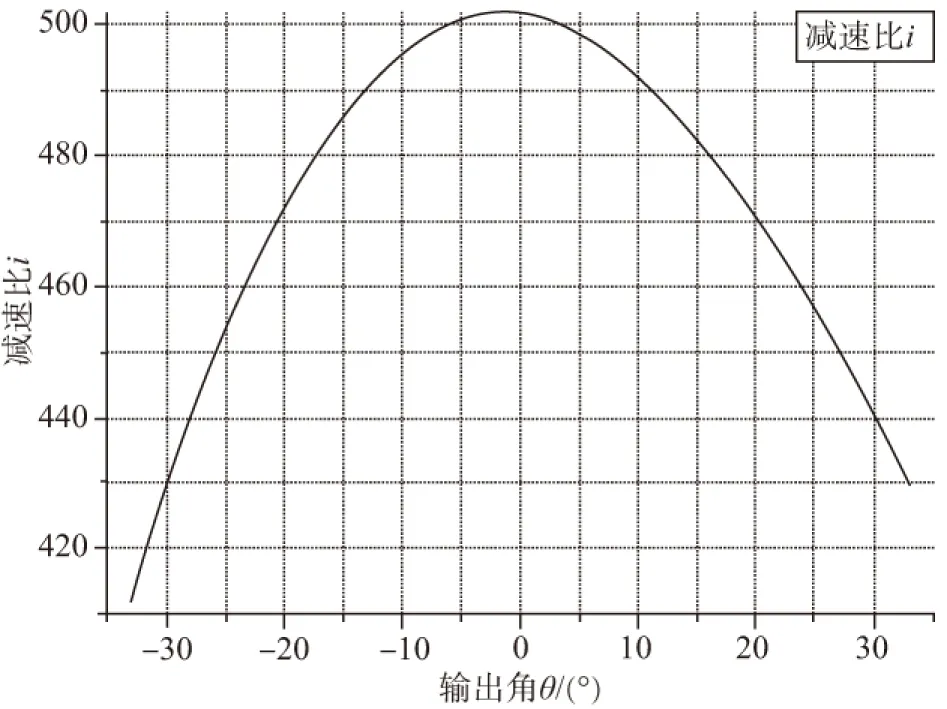
图7 输出角与减速比关系图Fig.7 Relation of output angle with reduction ratio
1.5 控制模块
PID控制器是一种调节简单、技术成熟可靠、在控制领域使用最为广泛的控制技术。它包含了系统现在(P)、过去(I)以及将来(D)等动态信息。通过合理的配置各环节的参数,可实现系统的最优控制,且具有较好的鲁棒性[7]。
理论上,增大系统的比例环节可消除系统静差,提高系统的快速响应。但过大的比例环节会导致系统相对稳定性变差。积分环节可改善系统的动态特性,有利于消除系统的静态误差,如果对系统所有误差信号都进行累加积分,将会造成控制量饱和,从而导致系统具有较大的超调,这在航天伺服机构中是不允许的。
基于传统PID控制存在的问题,文中控制系统采用积分分离PID控制方式,控制规律如式(5)所示。
(5)
1.6 限流保护模块
高压大功率电动舵机带载高速动作时,由于电机的启动、突然定位以及频繁换向,会有大的电流尖峰以及较长时间的大电流产生,尖峰电流持续时间为毫秒级,峰值电流幅值高达数百安培,而电流尖峰和长时间的大电流会造成功率元件(IGBT)失效甚至烧毁,进而导致整个系统失效。
限流模块的作用和机理为:通过电流传感器将系统母线的电流转换为电压信号,电压比较器则实时监测母线电流并以电压逻辑0、1的形式输出给CPLD。当电流值超过系统设定的安全阈值时触发保护程序[8],将功率器件关断,切断功率回路,持续一段时间(设定值)后重新开启,从而抑制系统功率器件中通过的大电流起到保护的作用。在程序设定中,电流保护的优先级最高。该工作过程类似于一个触发延时继电器,仿真框图如图8所示。当比较器有上升沿产生时,触发延时继电器,继电器导通延时一段时间后关断,功率器件恢复正常工作。
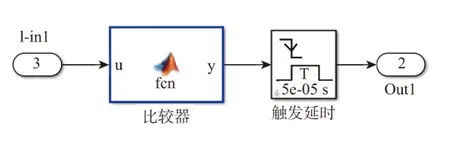
图8 限流模块仿真模型Fig.8 Simulation model of current limiting
1.7 结构模型的创建
将电动舵机的传动机构导入到Adams模型中,各零部件默认为刚体,并将静力学分析中有变形的零件转化为柔性体。在机构运动过程中引入刚体运动与变形等非线性因素[9],两种运动相互耦合,共同影响系统的动力学特性。柔性化的零部件主要包括壳体、连接部件、滚珠丝杠副等。在ProE软件中,将舵机与舵面进行三维装配,构建系统的CAD模型,对零部件进行适当简化后导入至Adams软件,对具有实体特征的零部件输入材料属性。
影响传动机构的非线性环节主要包括零件的公差、齿轮副的齿隙以及在传动过程中零部件的变形等,主要采用以下三种方式来模拟:创建CAD模型时,采用中差建模方式,模拟减速器各传动零件之间的实际间隙;创建齿轮模型,输入实际的齿轮几何参数,在传动过程中即可引入齿隙;将减速器中的壳体、连接部件、滚珠丝杠副等零部件转化为柔性体,引入零件的变形运动。
2 模型仿真与实测对比
根据上述模型分析,并将ADAMS建立的多体动力学模型导出生成MATLAB接口文件,导入MAT-LAB/Simulink仿真环境,建立完整舵机系统的联合仿真模型,如图9所示。
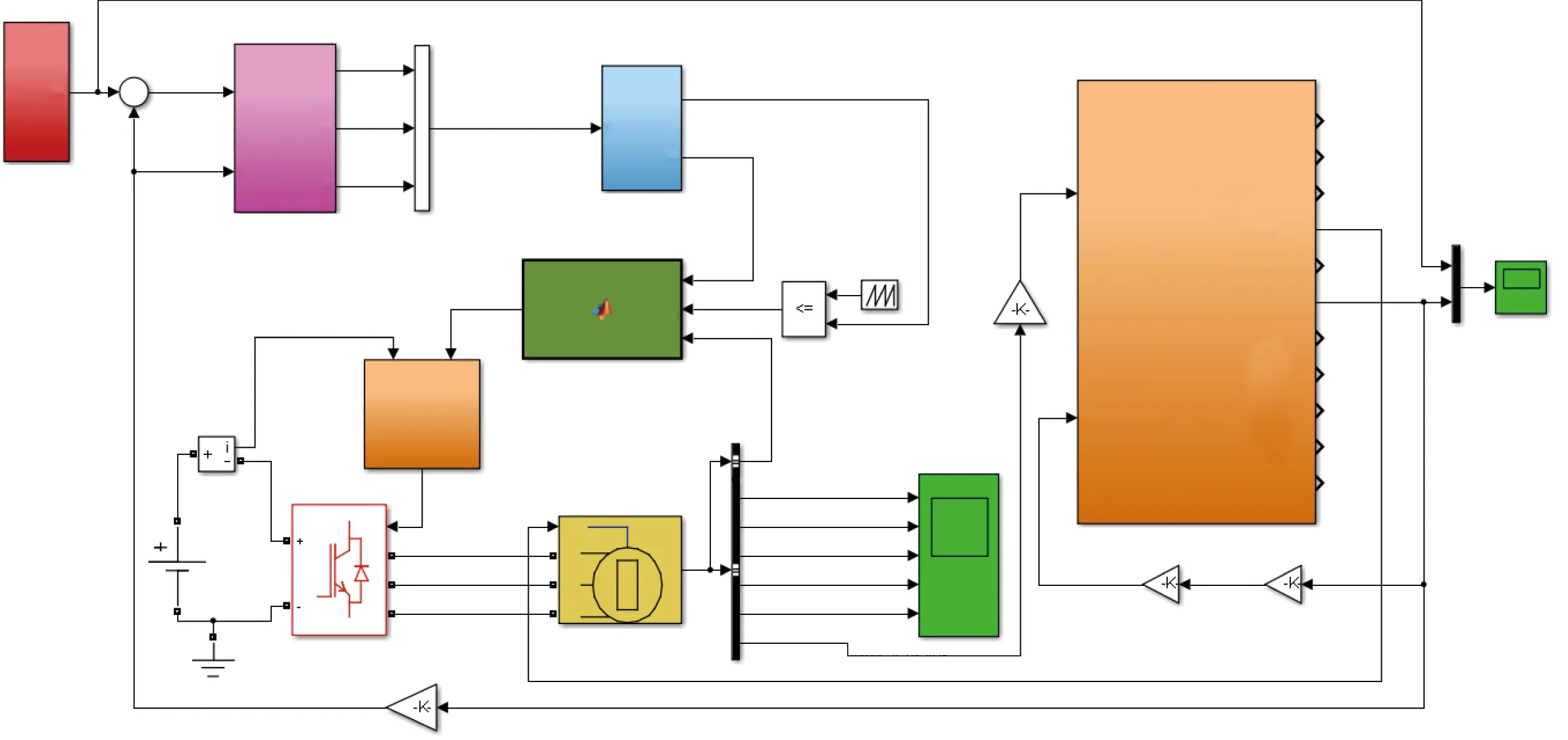
图9 系统仿真模型Fig.9 Simulation model of system
给仿真模型施加与舵机实际测试时相同的阶跃信号和带偏置的正弦波跟踪信号,将得到的仿真曲线与实测曲线进行对比,对比图如图10和图11所示。
从图10中可以看出,仿真模型和实际的舵机系统的阶跃响应吻合较好,由于系统传动机构的非线性环节及外部负载惯量等造成的系统超调得到仿真体现。

图10 阶跃曲线对比图Fig.10 Comparison of step response
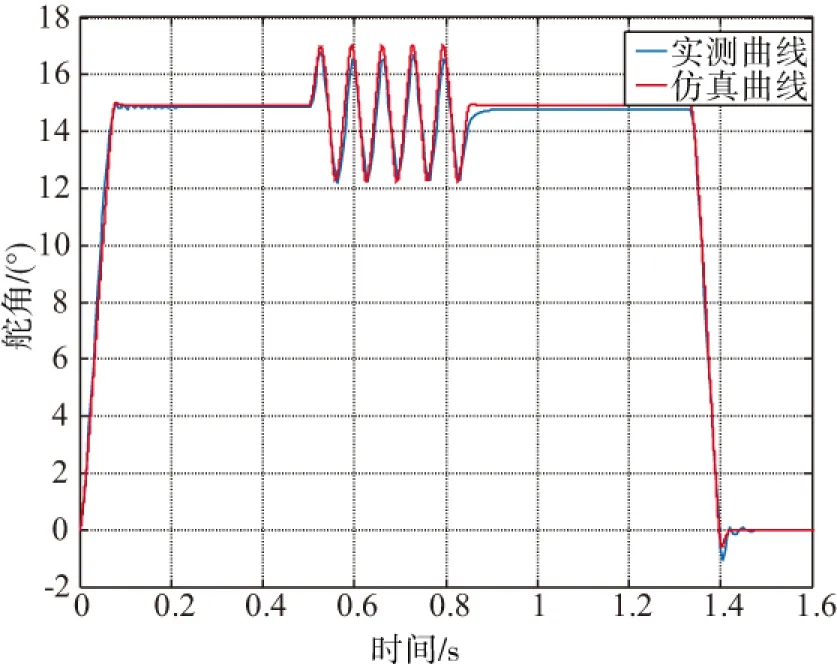
图11 正弦跟踪曲线对比图Fig.11 Comparison of sine tracking
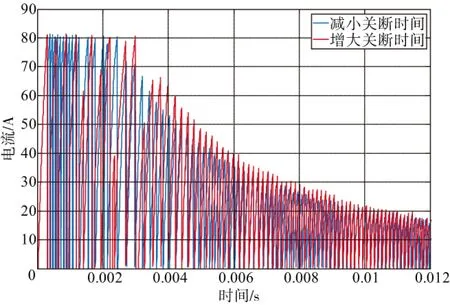
图12 电流阈值80A改变关断时间电流仿真曲线Fig.12 Curves of current with different off time when current threshold is 80A
从图11中可以看出,对于同一信号,仿真模型的输出无论是幅值裕度还是相角裕度都要优于实际系统,但二者的差别不大。造成这种现象的原因是在实际系统中存在数字采样、机械间隙以及摩擦等环节,这些环节都会造成信号衰减和滞后等现象。
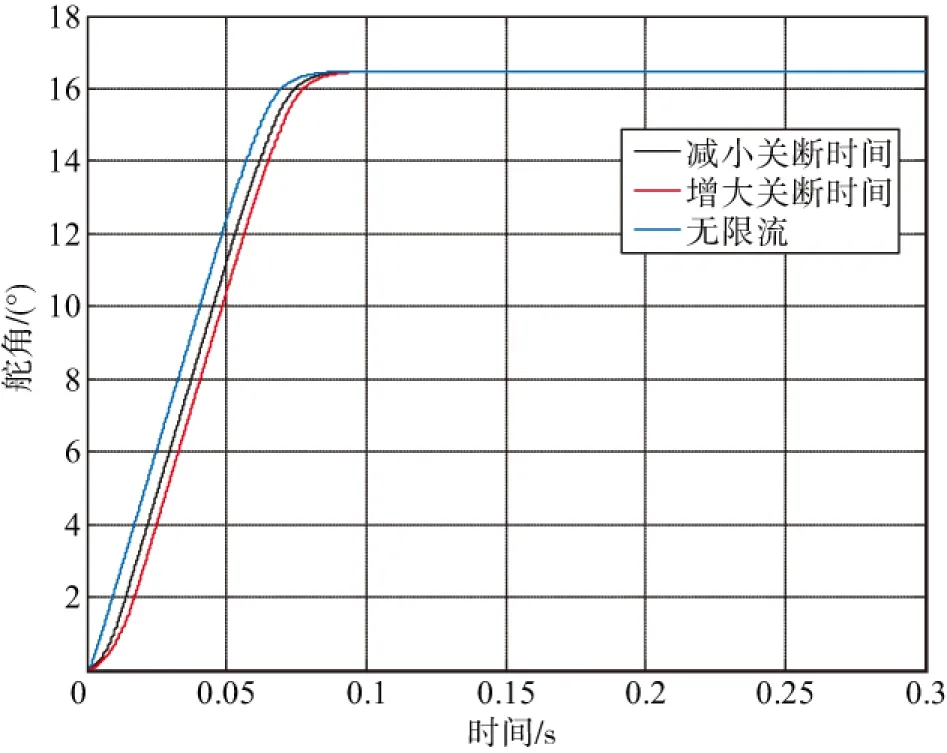
图13 电流阈值80A关断时间对阶跃响应的影响Fig.13 Influence of different off time to step response when current threshold is 80A
图12为设置电流阈值为80A时,在不同关断时间情况下系统电流的仿真曲线,从图中曲线可以看出当电流达到设定阈值(80A)时,功率器件关断,电流迅速衰减为零;满足关断时间后,电流恢复,系统正常工作。
图13为无限流(不关断功率管)和设置电流阈值为80A时,增大、减少功率管关断时间系统的阶跃响应仿真结果。从图13中可以看出,限流模块能够影响系统的动态,功率管关断时间越长,系统响应越慢。造成该现象发生的原因和机理为:电压一定的情况下,无刷电机的输入电流决定了输入功率,负载一定的情况下,电流越大系统的加速度越大,系统的响应速度越快。关断时间增加,电机电流的平均值降低,从而直接影响系统的快速性。从能量的角度分析,舵机系统在固定负载条件下转动一定角度的输出功率是恒定的,即输入功率是恒定的(不考虑损耗),电流平均值降低的情况下,系统输出某一恒定功率所需的时间必然增加,即系统的快速性受到影响。因此,增加限流模块的关断时间能够影响系统的动态特性,延长系统的上升时间,在实际调试过程中,可根据系统的性能指标对关断时间进行调整,从而在满足指标要求的情况下,对系统功率器件进行保护。
3 结论
论文中对基于直流无刷电机的大功率电动舵机系统进行了详细建模,模型中可方便地实现参数调整、PWM调制方法、控制算法以及电流保护的验证工作。文中将仿真曲线与实际测试曲线进行对比,对不同限流参数(功率器件关断时间)下系统的动态响应进行了仿真,并分析了不同限流参数对系统动态特性影响的原因与机理。对仿真结果的分析表明,该模型能够较为准确地仿真实际舵系统,对提高系统联合仿真结果的可信度具有积极意义。
[1] 张翔,马瑞卿,胡克石.航天大功率无刷电动舵机控制器研究[J].微特电机,2012,40(2):44-47.
[2] 沈引中.大功率电动舵机设计研究[D].南京航空航天大学,2012.
[3] 李强,张秦南,李俊,王立文.变结构控制技术在鱼雷舵机中的应用[J].鱼雷技术,2015,23(1):40-43.
[4] 殷云华,郑宾,郑浩鑫.一种基于Matlab的无刷直流电机控制系统建模仿真方法[J].系统仿真学报,2008,20(2):293-298.
[5] 张相军,陈伯时.无刷直流电机控制系统中PWM调制方式对换相转矩脉动的影响[J].电机与控制学报,2003,7(2):87-91.
[6] 曾漫,熊小丽,丁文革,范亚龙.一种典型数字无刷电动舵机的设计[J].中北大学学报(自然科学版),2011,32(6):751-757.
[7] 胡科峰,周云飞,李作清,等.基于积分分离的PID位置控制器的设计[J].液压与机床,2004(5):19-21.
[8] 张爱军,庞丽娟.数字舵机功率保护系统的设计[J].航空兵器,2008,6(3):45-46.
[9] 张明月.滚珠丝杠式电动舵机非线性分析及控制策略研究[D].中国科学院大学,2014.
Application Research on the Simulation Technology of High-Power Electromechanical Actuator System
JIANG Jian-long, LI Wen-wei, ZHANG Jin-duo, LI Peng-jia, WANG Hong-sheng
(Hubei Sanjiang Space Hongfeng Control Co., Ltd., Xiaogan, Hubei 432000,China)
With the upgrade of missile’s performance, the power of motor driven actuator becomes more and more high, the risks of research and development also becomes rising.So the precise simulation for the high-power electromechanical actuator system becomes an important work.In this paper, a united simulation model for a electromechanical actuator system is created based on Matlab and ADAMS.Compared with experimental results, simulated results testify the simulation model’s validity, which can increase the credibility of the simulation results.
High-power; Electromechanical Actuator; Simulation
10.19306/j.cnki.2095-8110.2016.03.005
2016-02-16;
2016-03-17。
姜见龙(1988-),男,硕士,工程师,主要从事伺服机构设计工作。E-mail:still_1109@163.com
TP215
A
2095-8110(2016)03-0025-07
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
机电信息(2022年9期)2022-05-07
商品与质量(2021年43期)2022-01-18
计算机仿真(2021年11期)2021-12-10
电子制作(2019年16期)2019-09-27
电子制作(2019年10期)2019-06-17
电子制作(2019年7期)2019-04-25
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
北京航空航天大学学报(2017年3期)2017-11-23
