
伺服位置控制参数的RBF神经网络自整定研究*
2016-04-15 05:10卢少武周凤星
组合机床与自动化加工技术 2016年3期
周 佳,卢少武,周凤星
(武汉科技大学 信息科学与工程学院,武汉 430081)
伺服位置控制参数的RBF神经网络自整定研究*
周佳,卢少武,周凤星
(武汉科技大学 信息科学与工程学院,武汉430081)
摘要:为了获得满意的交流伺服系统位置控制性能,需要对伺服系统位置控制参数进行整定。提出一种基于RBF神经网络的伺服系统位置控制参数自整定方法,该方法利用RBF神经网络全局寻优的优点,对伺服系统位置PF控制参数进行整定,从而改善常规PF控制器的控制效果,最后通过仿真实验进行了验证。仿真结果表明:与常规PF控制方法相比,该方法稳定有效,控制精度高,具有更好的控制效果。引入了RBF神经网络的伺服系统,提高了动态性能,增强了系统稳定性。
关键词:伺服系统;永磁同步电机;RBF神经网络;PF参数整定
0引言
永磁同步电机因具有系统响应快,运动平稳,传动效率高等优点,在数控机床、智能机器人等领域得到广泛应用,而永磁同步电机伺服系统的控制性能与其控制参数密切相关。在伺服系统三层控制环节中,位置环为外层控制环,其作用是保证系统静态精度和动态跟踪性能,使伺服系统能稳定、高精度运行,且在很多应用中,位置控制性能是伺服系统控制性能的最终体现,因此对伺服系统位置控制参数自整定方法进行研究显得尤为重要[1-3]。
近年来,随着神经网络理论的发展,众多学者提出将具有自学习能力的神经网络应用到伺服系统控制研究中。文献[4]将神经网络与传统滑模变结构控制(SMC)相结合,以实现SMC控制器参数的最优化自整定,该算法使得控制系统的动静态性能更优,稳定性更好。文献[5]针对液压伺服控制系统的非线性和时变性因素,提出一种基于BP神经网络的PID控制器,该控制器结合PID算法和神经网络的优点,具有鲁棒性强、超调量小和运行平稳等特点。文献[6]设计出一种基于RBF神经网络与传统PID控制相结合的控制器,应用该控制器的伺服系统结构简单,能适应环境变化,干扰被有效抑制。
径向基函数(RBF-Radial Basis Function)神经网络模拟了人脑中局部调整相互覆盖接收域的神经网络结构,具有单隐层的三层前馈网络。它能以任意精度逼近任意连续函数,是一种局部逼近的神经网络[7-8]。本文以永磁同步电机伺服系统位置环为研究对象,运用基于RBF神经网络的位置PF控制器对伺服系统位置PF的两个参数kp、kf进行整定,实现伺服系统位置环参数自动调节,达到提高伺服系统静态精度和动态跟踪性能的目的。最后通过仿真实验验证了该方法的可行性和稳定性。
1基于RBF神经网络位置PF参数整定
1.1基于RBF的位置PF参数整定过程
位置环常采用比例调节器,因为作为连续跟踪控制,位置伺服系统不希望位置出现超调与振荡。同时,为减小运行时的稳态位置跟踪误差,保证控制精度,应尽可能提高位置比例增益。而过度增加位置环控制增益会导致系统的振荡和失稳,因此,一般通过前馈复合控制结构改善伺服系统位置环的动态响应。本文中伺服系统位置环控制结构采用了PF控制器。
图1为伺服系统位置环控制结构,位置环控制参数整定过程的参考对象为框内部分,即位置环被控对象非线性参考模型,以其来寻求稳定准确的控制参数整定策略。
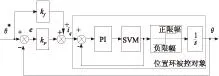
图1 基于SVM的位置环参考对象结构
伺服系统位置控制误差为:
(1)

本文采用增量式PF控制器,可以得到式(2):
(2)
由式(2)进一步推出式(3):
(3)
由式(2)和式(3)可得式(4),即为PF控制算法:
(4)
令PF两项输入为:
(5)
为了充分抑制系统响应过程中的超调,我们对伺服系统位置环控制指标进行了改进:
(6)
上式中,p为惩罚因子,一般大于1,可以根据需要来调节p的大小,当不需要抑制超调时,p=1。
采用RBF神经网络可以得到kp,kf的调整量:
(7)
基于RBF神经网络位置PF控制系统结构如图2所示。

图2 基于RBF神经网络PF控制框图
1.2RBF神经网络模型
RBF网络由输入到输出的映射是非线性的,隐含层空间到输出空间的映射是线性的,可以加快学习速度并避免局部极小问题[9]。
(8)

(9)
1.3RBF神经网络学习算法
输出权、节点中心及节点基宽参数的迭代算法可根据梯度下降法得到:
(10)
(11)
(12)
(13)
(14)
(15)
式中,η为学习速率,α为动量因子。
Jacobian阵算法为:
(16)
由式(16)可将式(7)进一步化为:
(17)
2仿真实例
为了验证本文提出的基于RBF神经网络的伺服系统位置自整定方法相比常规PF控制方法具有辨识精度高、控制效果更好的优点,将基于RBF神经网络的位置PF控制方法和未整定的位置PF控制方法进行仿真对比。伺服电机的相关参数如表1所示,通过对伺服系统位置环的数据离线采样,并对其进行递推最小二次辨识可得被控对象近似模型为:


(18)



图4 位置跟踪误差

图5 控制参数自适应整定
由图4a可知常规位置PF控制方法位置跟踪误差约在0.02s达到最大,然后减小,在约0.05s后达到稳定值,稳态位置跟踪误差较大,位置跟踪过程中存在超调;由图4b仿真结果可以看出,基于RBF神经网络的位置PF控制方法位置跟踪误差约在0.02s达到最大,然后一直减小,在约0.98s后达到稳定值,稳态位置跟踪误差较小。与常规位置PF控制方法相比,基于RBF神经网络的位置PF控制参数自整定方法能明显减小位置跟踪误差,提高控制精度。
3结束语
本文以永磁同步电机伺服系统位置环为研究对象,结合RBF神经网络的优点,采用基于RBF神经网络的位置PF控制器对伺服系统位置环的控制参数进行整定,实现伺服系统位置环参数自动调节,通过仿真实验说明基于RBF神经网络的伺服系统位置PF控制参数自整定方法稳定有效,容易实现,可以明显改善常规PF控制效果。
[参考文献]
[1] 郑世祺, 唐小琦, 卢少武, 等. PMSM伺服系统参数自整定研究[J]. 电气传动, 2013 , 43(3): 10-13.
[2] 陈鹏展, 唐小琦, 金宏星. 伺服系统速度环控制参数自整定方法研究[J]. 仪表技术与传感器, 2010(2): 78-81.
[3] 李兵强, 吴春, 林辉. 基于参考输入学习的永磁同步电机高精度位置伺服系统[J]. 中国电机过程学报, 2012 , 32(3): 96-102.
[4] 王辉, 万里瑞, 王才东. 基于智能滑模控制的永磁直线同步电机调速系统[J]. 电机与控制应用, 2014, 41(2): 6-10.
[5] 丁曙光, 吴卫平, 桂贵生. 基于神经网络PID的液压位置伺服系统控制的研究[J]. 组合机床与自动化加工技术,2009(3): 49-51.
[6] 顾用地, 陆俊. 永磁同步电机伺服系统的RBF神经网络PID控制[J]. 电气自动化, 2013, 35(4): 34-36.
[7] 徐庆宏, 戴先中. 基于在线学习RBF神经网络的汽门开度自适应补偿控制方法[J]. 电机与控制学报, 2010, 14(2): 13-19.
[8] 强勇, 凌有铸, 贾冕茜. 基于RBF神经网络的永磁同步电机速度控制[J]. 微电机, 2013, 46(4): 53-56.
[9] 刘金坤. 先进PID控制MATLAB仿真[M]. 3版.北京: 电子工业出版社, 2013.
[10] S Kissling, Ph Blanc, P Myszkorowski,et al. Application of iterative feedback tuning (IFT) to speed and position control of a servo drive [J]. Control Engineering Practice,2009, 17(7): 834-840.
(编辑李秀敏)
Study on Position Control Parameters Auto-tuning of Servo System Based on RBF Neural Network
ZHOU Jia, LU Shao-wu, ZHOU Feng-xing
(College of Information Science and Engineering, Wuhan University of Science and Technology, Wuhan 430081,China)
Abstract:To obtain the satisfactory the position control performance of AC servo system, the position control parameters of servo system should be tuned. This paper presents a position control parameters auto-tuning algorithm of servo system based on RBF neural network, the aim of which is to improve the control effect of traditional PF controller. It is verified through simulation finally. The simulation results show that, compared with traditional PF control algorithm, the proposed algorithm is stable and effective, and has high precision and better control effect. Based on the RBF neural network, the dynamic performance and the stability of the servo system is improved obviously.
Key words:servo system; PMSM; RBF neural network; PF parameter tuning
中图分类号:TH161;TG659
文献标识码:A
作者简介:周佳(1990—),男,湖北黄冈人,武汉科技大学硕士生,研究方向为伺服控制器和嵌入式,(E-mail)598308367@qq.com。
*基金项目:国家自然科学基金项目(51405349);武汉科技大学科技创新基金项目(14ZRA139)
收稿日期:2015-05-04
文章编号:1001-2265(2016)03-0075-03
DOI:10.13462/j.cnki.mmtamt.2016.03.021
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
制造技术与机床(2017年3期)2017-06-23
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
科教导刊·电子版(2016年26期)2016-11-21
电脑知识与技术(2016年25期)2016-11-16
科技视界(2016年18期)2016-11-03
科技视界(2016年12期)2016-05-25
企业导报(2016年6期)2016-04-21
北京航空航天大学学报(2016年4期)2016-02-27
