
高超声速飞行器纵向飞行稳定域与迟滞分析
2016-05-23 09:35苏二龙罗建军
飞行力学 2016年2期
苏二龙, 罗建军
(西北工业大学 航天飞行动力学技术国家重点实验室, 陕西 西安 710072)
高超声速飞行器纵向飞行稳定域与迟滞分析
苏二龙, 罗建军
(西北工业大学 航天飞行动力学技术国家重点实验室, 陕西 西安 710072)
摘要:针对滑翔式高超声速飞行器纵向失稳问题,基于连续算法和分岔理论,求解并分析了特征点单参数分岔图、平衡分支的稳定性和突变点,得出在大迎角飞行时存在较为严重的失稳现象;最后分析了多吸引点和迟滞效应现象。研究结果表明,滑翔式高超声速飞行器在大迎角飞行时存在严重失稳、多吸引域和复杂迟滞运动。此结果在实现飞行器稳定飞行和控制器设计方面具有很好的参考价值。
关键词:高超声速飞行器; 纵向飞行; 稳定域与迟滞
0引言
当滑翔式高超声速飞行器进行复杂的高机动任务时,经历复杂的流动环境有可能诱发未知的不可控行为,从而危及飞行安全,降低飞行品质并损害任务行为的准确性[1]。为了增加飞行器的滑翔距离,提高机动能力,由此可能导致飞行器的稳定裕度很低或不稳定。同时,在大迎角下机动飞行时,其空气动力学特性极其复杂,严重影响高超声速飞行器的气动控制特性。背风面气流遮挡和分离会使升降副翼上偏时操纵效率降低,激波诱导分离产生纵向低头力矩等[2]。高超声速飞行器的迎角、马赫数和高度范围非常大,受极强的非线性空气动力学影响,使得飞行器在大迎角下的运动极其复杂,基于小扰动假设的线性化分析方法已经无法全面揭示其运动规律。文献[3]首次将连续算法和分岔理论应用到非线性飞行力学的分析中;文献[4]采用扩展的分岔理论(EBA)分析了在约束下的飞行器的非线性稳定性;文献[5]首次将连续算法和分岔理论应用到飞行器的总体设计中,从而改善了飞行器的飞行性能;文献[6-8]基于小扰动假设的方法研究了高超声速重复使用运载器的稳定性和可控性;文献[9-11]将基于线性化方法的稳定判据应用到了高超声速高机动飞行器的气动控制性能研究中。
本文将连续算法与分岔理论引入到高超声速飞行器纵向非线性动力学模型中,从全新的视角分析了大迎角下的高超声速飞行器非线性失稳问题,基于单参数分岔计算了飞行器的分支平衡图和失稳区域,并对稳定平衡点对应的吸引域以及迟滞效应进行了分析。
1方法和模型
1.1分岔理论和连续算法
分岔和连续分析方法是一种基于非线性动力学系统的理论[12],其本质是在一定的参数变化范围内,采用预测-校正方法连续求得系统稳态解,得到的分岔拓扑图可以给出定量的动力学响应变化。对于自治动力学系统的一般形式:
(1)

1.2高超声速飞行器纵向非线性动力学模型
本文采用的纵向动力模型为二阶非线性动力学模型:
(2)

2特征点平衡分支分析
选择两个特征点进行分析:远距离稳定滑翔段对应状态(Ma=15,45 km)和快速下压段末端状态(Ma=5,27 km),与末端制导精度密切相关,同时这两个特征点具有一定的动力学代表性。采用连续算法,选择舵偏角为连续参数,求解其平衡分支。图1为(Ma=5,27 km)状态下,三维平衡分支曲线在(δz,α)和(δz,q)平面投影的平衡分岔图。图2为(Ma=15,45 km) 状态下,三维平衡分支曲线在(δz,α)和(δz,q)平面投影的平衡分岔图。图中,实线为稳定的平衡点轨迹,虚线为不稳定的平衡点轨迹,点LP代表极限点,其对应着平衡分支稳定性的突变。
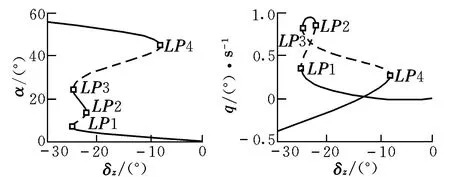
图1 (Ma=5,27 km)状态的平衡分岔图Fig.1 Equilibrium branch at (Ma=5,27 km)
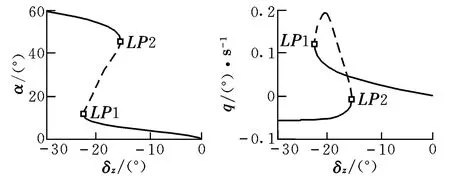
图2 (Ma=15,45 km)状态的平衡分岔图Fig.2 Equilibrium branch at (Ma=15,45 km)
图1中存在4个极限点和两段不稳定的平衡分支,第一段不稳定分支区间对应的迎角范围为[7.0°,-13.8°](小迎角不稳定区域),第二段不稳定分支区间在[24.5°,-44.9°]之间(大迎角不稳定区域)。由此得出:当舵偏角从0°逐渐增大时,平衡分支对应迎角随舵偏角的增大缓慢增大;当舵偏角为-25.3°时,出现第一个极限分岔点LP1,运动失去稳定性;当舵偏角沿着平衡分支减小到-22.5°时,出现第二个极限分岔点LP2,飞行器重新获得稳定性;当舵偏沿平衡分支增大到-25.0°时,第三个极限分岔点LP3出现,再次进入失稳分支;当舵偏角减小到-8.1°时,飞行器重新获得稳定。俯仰角速度的分岔图存在4个突变点,且稳定性在突变点变化。
图2中存在一段不稳定的平衡分支,其不稳定分支迎角区间为[11.7°,-45.6°],相对于图1情况,中间的一段稳定平衡分支消失,且出现不稳定突变的迎角略有增大。其对应的俯仰角速度分岔图存在两个突变点。
3滞后运动分析
在不同稳定性的平衡分支之间存在复杂的滞后运动,对其分析可以有效地预测和控制运动的突变。图3为(Ma=5,27 km)状态选取的5个平衡点及滞后运动轨迹。图中,当舵偏角为-23°时,A点、C点和E点位于稳定的平衡分支上,是稳定的平衡点(吸引点);B点和D点位于不稳定的平衡分支上,为不稳定的平衡点(排斥点)。当高超声速飞行器处于LP1右侧的小迎角稳定分支上时,增大舵偏角至接近分岔点LP1,飞行器在强扰动下会脱离平衡分支,沿着轨迹g(滞后运动的跳变轨迹)跳到大迎角稳定分支(LP4左边稳定分支)。随着舵偏角的减小,当接近LP4点时,在扰动作用下,迎角突变沿轨迹m会回到小迎角稳定分支,整个过程呈现滞后现象。如果当舵偏角距离LP1有一定距离,此时受到一个较大扰动,则其运动可能沿着轨迹h跳变到平衡分支LP2-LP3,随着舵偏减小,会沿着轨迹f回到低迎角稳定分支。
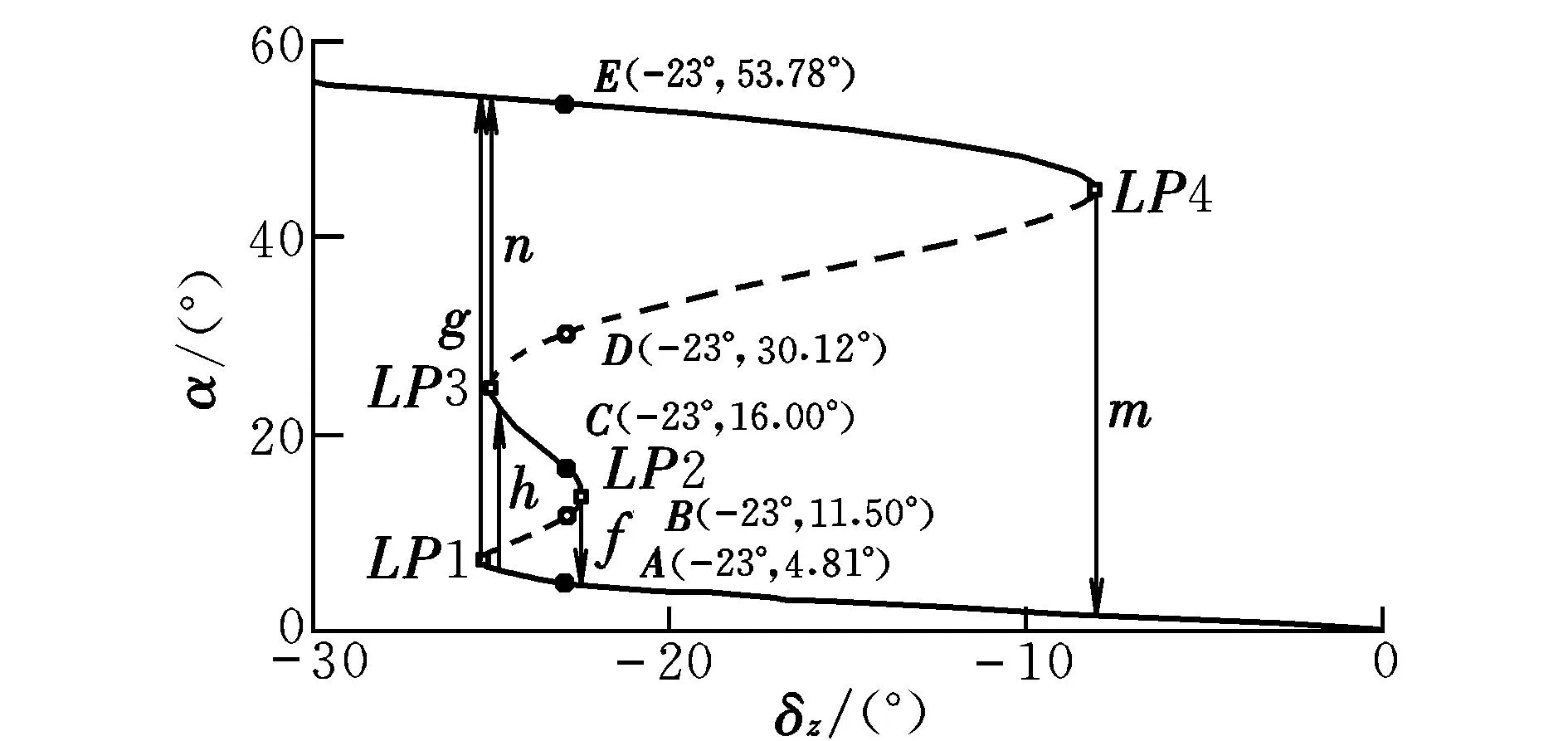
图3 5个平衡点及滞后运动轨迹Fig.3 Five equilibrium points and hysteresis trajectory
图4为(Ma=15,45 km)状态选取的3个平衡点及滞后运动轨迹。
图中,当舵偏为-19°时,A点和C点是稳定的平衡点(吸引点),B点为不稳定的平衡点(排斥点)。当舵偏逐渐增大到LP1附近时,一个较小的扰动飞行器状态可能直接越过不稳定的平衡分支,沿着轨迹h被大迎角的稳定分支吸引,迎角突然增

图4 3个平衡点及滞后运动轨迹Fig.4 Three equilibrium points and hysteresis trajectory
大,进入失速吸引域;当舵偏在大迎角稳定平衡分支且逐渐减小舵偏,则在舵偏接近LP2时,如果飞行器受到一定的扰动,就会沿着轨迹f被小迎角稳定平衡分支吸引,从而从失速稳定区改出。
4稳定域分析
不同的平衡点对应着不同的稳定域或吸引域(稳定分支平衡点)和排斥域(不稳定分支平衡点)。当参数一定时(马赫数固定,舵偏恒定),稳定分支平衡点的吸引域是固定的。如果能给出飞行器对应的稳定点以及稳定点对应的吸引域大小,则可以预测飞行器未来的运动,将其反馈给控制系统,从而有效地实现稳定控制和机动飞行,提升高超声速飞行器的飞行性能。图5为(Ma=5,27 km)状态采用反步积分法求得的3个稳定平衡点对应的吸引域。图6为(Ma=15,45 km)状态的两个稳定平衡点对应的吸引域。
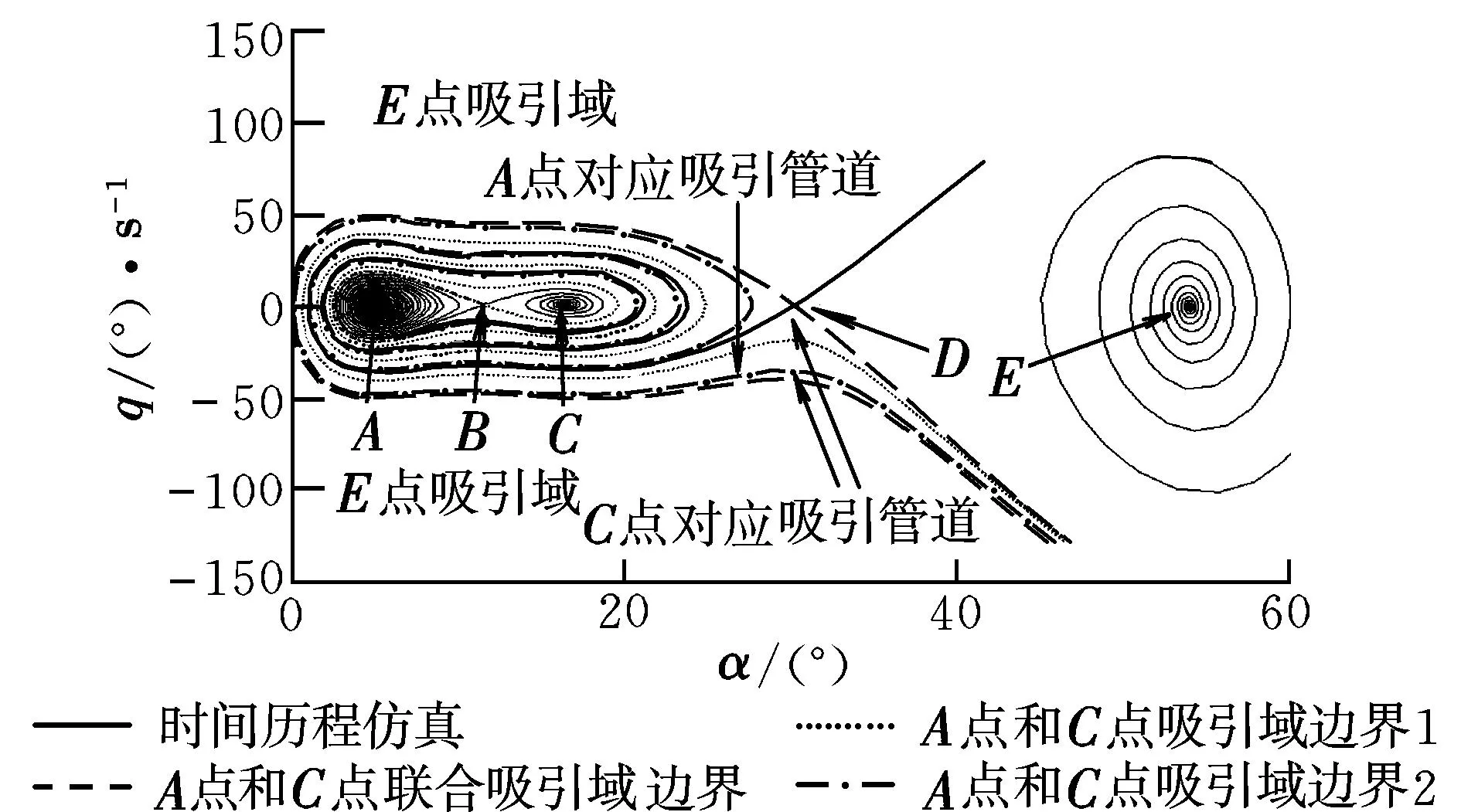
图5 3个稳定平衡点吸引域Fig.5 Attracting regions for 3 stable equilibrium points
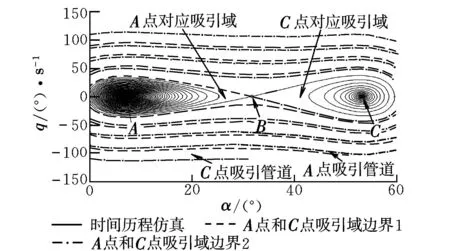
图6 2个稳定平衡点吸引域Fig.6 Attracting regions for 2 stable equilibrium points
图5是3个平衡点对应的吸引域,虚线所对应的区域为A点和C点控制的吸引域,虚线外的区域为稳定点E的吸引域。当迎角和俯仰角速度的初始状态或强扰动引起的扰动后状态值位于A点和C点的吸引域内,则飞行器不会进入大迎角对应的吸引域;当飞行器的扰动值或初始值位于E点控制的吸引区域时,飞行器将进入大迎角失速区域。在A点和C点的联合吸引域内,A点对应的吸引域位于点线和点划线之间;C点对应的吸引域位于虚线和点线以及虚线和点划线之间。
从图6中可以看出:当飞行器的状态值位于稳定点A的吸引管道内,系统状态值将沿着管道最终进入A点的吸引域;当系统状态值位于稳定点C的吸引管道内,系统的状态将沿着管道进入C点的吸引域。同时相对于稳定点C的吸引管道,稳定点A的管道要窄的多,C点(大迎角稳定平衡点)所控制的区域大于A点(小迎角稳定平衡点)所控制的区域,所以飞行器更容易进入失速稳定域。
5结束语
本文研究了滑翔式高超声速飞行器大迎角纵向失稳及其稳定控制问题,采用连续算法和分岔理论分析了单参数分岔,以及吸引点对应吸引域和存在的复杂迟滞现象。得出在低空低马赫数情况下(Ma=5,27 km),存在5个平衡点,3个为稳定的吸引点,并求得了各个稳定点所对应的吸引域。对于高空高马赫情况(Ma=15,45 km),存在3个平衡点,2个为吸引点,并计算了其所对应的吸引域。后续将进一步研究滑翔式高超声速飞行器的大迎角稳定飞行和失稳控制问题。
参考文献:
[1]叶友达.近空间高速飞行器气动特性研究与布局设计优化[J].力学进展,2009,39(6):683-694.
[2]张鲁民.航天飞机空气动力学分析[M].北京:国防工业出版社,2009:30-40.
[3]Carroll J V,Mehra R K.Bifurcation analysis of non-linear aircraft dynamics[J].Journal of Guidance,Control,and Dynamics,1982,5(5):529-536.
[4]Pashilkar A A,Pradeep S.Computation of flight mechanics parameters using continuation techniques[J].Journal of Guidance,Control,and Dynamics,2001,24(2):324-329.
[5]Amit K K,Jatinder S.Aircraft design using constrained bifurcation and continuation method[J].Journal of Aircraft,2014,51(5):1647-1652.
[6]Lee H P,Chang M,Kaiser M K.Flight dynamics and stability and control characteristics of the X-33 technology demonstrator vehicle[R].AIAA-98-4410,1998.
[7]Philip C.An entry flight controls analysis for a reusable launch vehicle[R].AIAA-2000-1046,2000.
[8]Tancredi U,Grassi M,Verde L,et al.Aerodynamics uncertainties compliance with desired lateral-directional dynamics for an unmanned space vehicle[R].AIAA-2005-6962,2005.
[9]祝立国,王永丰,庄逢甘,等.高速高机动飞行器的横航向偏离预测判据分析[J].宇航学报,2007,28 (6):1550-1553.
[10]高清,赵俊波,李潜.类HTV-2横侧向稳定性研究[J].宇航学报,2014,35(6):657-662.
[11]高清,李建华,李潜.升力体高超声速飞行器横向气动特性研究[M].实验流体力学,2015,29(1):43-48.
[12]Kuznetsov Y A.Elements of applied bifurcation theory[M].New York:Applied Mathematical Sciences,Springer-Verlag,2004.
[13]Stephen J G,Mark H L,Simon A N.Upset dynamics of an airliner model:a nonlinear bifurcation analysis[J].Journal of aircraft,2013,50(6):1832-1842.
(编辑:方春玲)
Analysis of stability region and hysteresis for longitudinal flight dynamics of hypersonic vehicle
SU Er-long, LUO Jian-Jun
(National Key Laboratory of Aerospace Flight Dynamics, NWPU, Xi’an 710072, China)
Abstract:For addressing the issue of loss of stability for longitudinal motion of glide hypersonic vehicle, the single parameter equilibrium bifurcation branch maps and the corresponding stability as well as sudden change points were computed and analyzed based on bifurcation and continuation method. The conclusion that the loss of stability at high AOA was significant. Lastly, the multi-attracting regions and hysteresis were analyzed. The results show that the glide hypersonic vehicle will have the motion of severe loss of stability, multi-attracting area and complex hysteresis during high AOA flight. The results will provide important reference for flight stability as well as the controller design.
Key words:hypersonic vehicle; longitudinal flight; stability region and hysteresis
中图分类号:V211
文献标识码:A
文章编号:1002-0853(2016)02-0051-04
作者简介:苏二龙(1985-),男,河南开封人,博士研究生,研究方向为高超声速飞行器动力学建模与控制。
收稿日期:2015-07-27;
修订日期:2015-11-23; 网络出版时间:2016-01-10 14:13
