
带有量化的事件触发预测控制
2016-06-22 09:13邹媛媛牛玉刚
华东理工大学学报(自然科学版) 2016年2期
关键词:量化
王 权, 邹媛媛, 牛玉刚
(华东理工大学化工过程先进控制和优化技术教育部重点实验室,上海 200237)
带有量化的事件触发预测控制
王权,邹媛媛,牛玉刚
(华东理工大学化工过程先进控制和优化技术教育部重点实验室,上海 200237)
摘要:针对存在量化的网络控制系统,提出了一种基于事件触发机制的预测控制设计方法,其中,信号从传感器传送到控制器和从控制器传送到执行器时需要被量化。建立了带有事件发生器的网络化模型,设计了事件触发机制,给出了预测控制律的设计方法,分析了闭环系统稳定性条件。最后,通过数值仿真验证了本文方法的有效性。
关键词:网络控制系统; 量化; 预测控制; 事件触发
近年来,随着网络技术的迅速发展,网络控制系统(Networked Control Systems,NCS)引起了学术界和工业过程领域的广泛关注[1-4]。与传统“点对点”直接相连的控制系统相比,网络控制系统具有成本低、灵活性高、易于安装和维护等优点。然而,网络自身的一些局限性也给网络控制系统的研究带来了新的挑战,比如网络时滞、数据丢包、数据量化等都是亟待解决的问题。为了节约有限的带宽资源,系统信号通过网络传输之前通常需要被量化,而由量化产生的量化误差不可避免地会影响控制系统的性能。
针对网络控制系统的量化问题,目前已有大量研究[5]。文献[6]介绍了一种静态的对数量化器。文献[7]指出对数量化器的量化稳定性问题等价于带有扇形界不确定性的控制系统的鲁棒稳定性问题。在此基础上,文献[8-9]同时考虑数据丢包问题,给出了鲁棒预测控制综合方法设计控制器,保证了闭环系统的稳定性。
传统的网络控制系统采用时间触发机制,即采样信号周期性地被传输,控制器也是周期性地执行控制任务。这种机制会明显增加网络传输负载,造成通信资源的浪费。为了减少网络中的数据传输量,即减少不必要的通信资源浪费,文献[10]提出了事件触发机制,即采样信号只有在满足事件触发条件时才被传输,否则就不传输,有效地降低了网络通信负担。近几年,事件触发网络控制系统方面的研究已引起了学者的广泛关注。文献[11]研究了NCS中事件触发通信策略和H控制的联合设计问题,同时考虑了通信时滞和丢包的影响。文献[12]针对带有丢包和量化的NCS,提出了基于事件触发的控制方法,并给出了最大容许连续丢包的上界。预测控制(Model Predictive Control,MPC)作为一类典型的工业过程控制方法,已被成功应用于网络控制系统[8-9,13-15]。考虑到将事件触发机制应用于网络化预测控制系统,文献[16]对满足约束并带有外界扰动的NCS设计了事件触发预测控制器,在减少通信量和计算量的同时,保证了系统良好的控制性能。文献[17]针对存在时滞的NCS,研究了基于模型的事件触发预测控制问题,给出了控制器和事件触发参数的联合设计方法。但到目前为止,已有文献中基于事件触发策略的预测控制方法都没有考虑量化问题的影响,特别是已有成果并不能简单地推广到存在量化信号的情况,因此,开展带有量化的事件触发预测控制问题的研究十分必要。
为了降低网络中的信息通信量,减少通信资源不必要的浪费,同时考虑到网络带宽资源受限问题,本文针对存在状态和控制信号量化的离散时间线性系统,提出了事件触发预测控制与量化相结合的一种新方法。首先,分析了经过量化的状态信号和控制信号的模型,然后建立了带有事件发生器和信号量化器的网络控制系统模型,给出了预测控制方法设计控制器,并利用李雅普诺夫稳定性理论和线性矩阵不等式(Linear Matrix Inequality,LMI)方法,得到事件触发预测控制闭环系统稳定性条件。
1问题描述
考虑如图1所示的网络控制系统,包括被控对象、传感器、事件发生器、预测控制器、执行器和量化器。被控对象为离散时间线性时不变系统,如式(1)所示。

(1)
其中:x(k)∈n和u(k)∈m分别为系统状态和控制输入;A和B是已知的系统矩阵。传感器和控制器、控制器和执行器之间分别通过网络连接,并且,所有数据在通过网络传输之前需要被量化。

图1 带有量化的事件触发网络控制系统结构图

(2)
量化等级集合定义为
对于系统(1)中的x(k)∈n,量化的状态信息可以描述为

利用文献[7]中的扇形界方法,可以把上式写成
(3)
其中,
(4)
τfl表示第l个通道的量化器对应的量化密度,εl(k)代表不确定性。
根据式(4),Λf(k)可以表示为
(5)
(6)


本文的主要目标是在网络控制系统中存在量化的情况下,设计基于事件触发的预测控制器来减少网络控制系统中通信资源的消耗,同时保证闭环系统的稳定性。
2事件触发预测控制
2.1事件触发机制
事件发生器位于传感器和量化器f之间(如图1所示),它会根据事先设定的事件触发条件来决定当前的状态信息x(k)是否被传送到量化器f。如果事件触发条件满足,那么当前时刻的状态就被传送到量化器f,否则不传送。考虑如下形式的事件触发条件:
(9)
其中:x(k)和x(ki)分别表示当前时刻的状态信息和上一个事件触发时刻的状态信息;μ∈(0,1)是给定的参数;Φ是一个正定对称矩阵。当满足事件触发条件式(9)时,x(k)被传送到量化器f,此时,记ki+1=k。
状态信息被传送的时刻记为ki,i=0,1,…,即事件触发时刻。假设第1个事件发生在k0=0时刻。由事件触发条件式(9)可知,只有部分状态信息需要被传送。该传输机制减少了网络中的信息传输量,节省了网络通信资源。特别地,当事件触发条件中的参数μ=0时,事件触发机制退化为传统的时间触发机制。

(10)
其中F为预测控制反馈增益矩阵。在(ki,ki+1)之间,控制律表达式为
(11)
由以上分析可得带有量化的事件触发网络控制系统模型如下:

(12)
2.2预测控制律的计算
在事件触发时刻ki,考虑如下形式的预测控制性能指标:
(13)

(14)
根据模型(1),系统的状态预测方程描述为
(15)
其中
进一步,性能指标式(13)可以写成如下形式:
(16)

MPC优化问题可以描述为
(17)
使得式(14)、式(15)成立。结合状态预测模型式(15),通过极值必要条件∂J(ki)/∂U(ki)=0,可求出最优解的解析表达式:
(18)
由此可求出即时控制律
(19)
其中,反馈增益
(20)
本文基于事件触发的预测控制方法,只有在事件触发时刻才求解MPC优化问题得到新的控制律,所以,这种方法减少了控制器的计算量,降低了系统的计算负担。
2.3稳定性分析
本节将设计事件触发条件式(9)中的参数Φ,使得闭环系统式(12)在事件触发条件式(9)下是渐近稳定的。
定理1考虑本文中提出的带有量化的事件触发网络控制系统,对于给定的系统参数A和B、常值参数μ∈(0,1)和预测控制反馈增益F,如果存在合适维数的对称正定矩阵P>0和Φ>0,使得下面的线性矩阵不等式成立。
(21)
那么基于事件触发条件(式(9))的闭环系统(式(12))是渐近稳定的。
证明首先在两个事件触发时刻之间定义一个状态测量差值
(22)
那么闭环系统(式(12))可重新描述为
(23)
由事件触发条件(式(9))可知,当k∈[ki,ki+1)时,没有事件发生,即没有状态信息被传送到量化器f,所以有式(24)成立。
(24)
选取如下Lyapunov 函数
V(k)=x(k)TPx(k)
其中P是一个对称正定矩阵。当k∈[ki,ki+1)时,根据式(23)计算Lyapunov函数的差值。由式(24)可得

x(k+1)TPx(k+1)-x(k)TPx(k)≤
x(k+1)TPx(k+1)-x(k)TPx(k)-
其中
Ω可以分解为
利用Schur补可得,Ω<0等价于
(25)
由于Λg(ki)∈Ωg,Λf(ki)∈Ωf,因此LMIs(式 (21))成立可保证式(25)成立。根据李雅普诺夫稳定性理论,可得闭环系统(式(12))在事件触发条件(式(9))下渐近稳定。证毕。
带有量化的事件触发预测控制具体算法步骤如下:
离线计算:
(1)给定x(k0)=x(0),Np,Nu,Q和R,根据式(20)得到预测控制增益矩阵F。
(2)给定μ,ρf,ρg和ξ0,求解LMIs(式(21)),得到事件触发条件(式(9))中的参数Φ。
在线计算:
(1)在每个采样时刻k,测量当前状态x(k),判断事件触发条件是否成立。如果成立,转到步骤(2),如果不成立,转到步骤(3)。
(3)将u(k)=u(ki)作用到系统上,令k=k+1,重复步骤(1)。
3仿真实验
本文采用文献[14]中小车倒立摆的例子来说明本文给出的带有量化的事件触发预测控制方法的有效性。其中系统参数取值如下:

初始状态为x0=[0.05-0.100.02]T,预测控制中的权矩阵Q=4×I4×4,R=0.01,预测时域Np=5,控制时域Nu=3。对数量化器中的参数ρf=ρg=0.8,ξ0=0.1,则τf=τg=0.111 1,凸多面体的两个顶点分别为Λf1=1+τf=1.111 1,Λf2=1-τf=0.888 9,Λg1=1+τg=1.111 1,Λg2=1-τg=0.888 9。事件触发条件参数μ=0.2。预测控制反馈增益为
F=[-4.361 7 -14.395 2 10.188 2 0.581 1]
通过求解LMIs(式(21)),可以得到事件触发条件中的参数
闭环系统的状态轨迹和控制信号如图2和图3所示,从图中可以看出本文方法能够保证闭环系统的稳定性。图4给出了事件触发时刻,其中,幅值为1的时刻代表事件触发时刻,幅值为0的时刻代表事件不触发时刻。从图4可以看出,在事件触发条件的作用下,70个时刻中只有19个事件触发时刻,即只有27.14%的状态信息需要被传送。图5给出了带有量化的事件触发预测控制与相同条件下的时间触发预测控制的性能比较图,从图中可以看出,时间触发与事件触发两者的性能相差不大。所以,在保证性能的前提下,本文带有量化的事件触发预测控制方法明显降低了网络中的信息通信量,从而减少了通信资源的浪费。

图2 系统状态轨迹
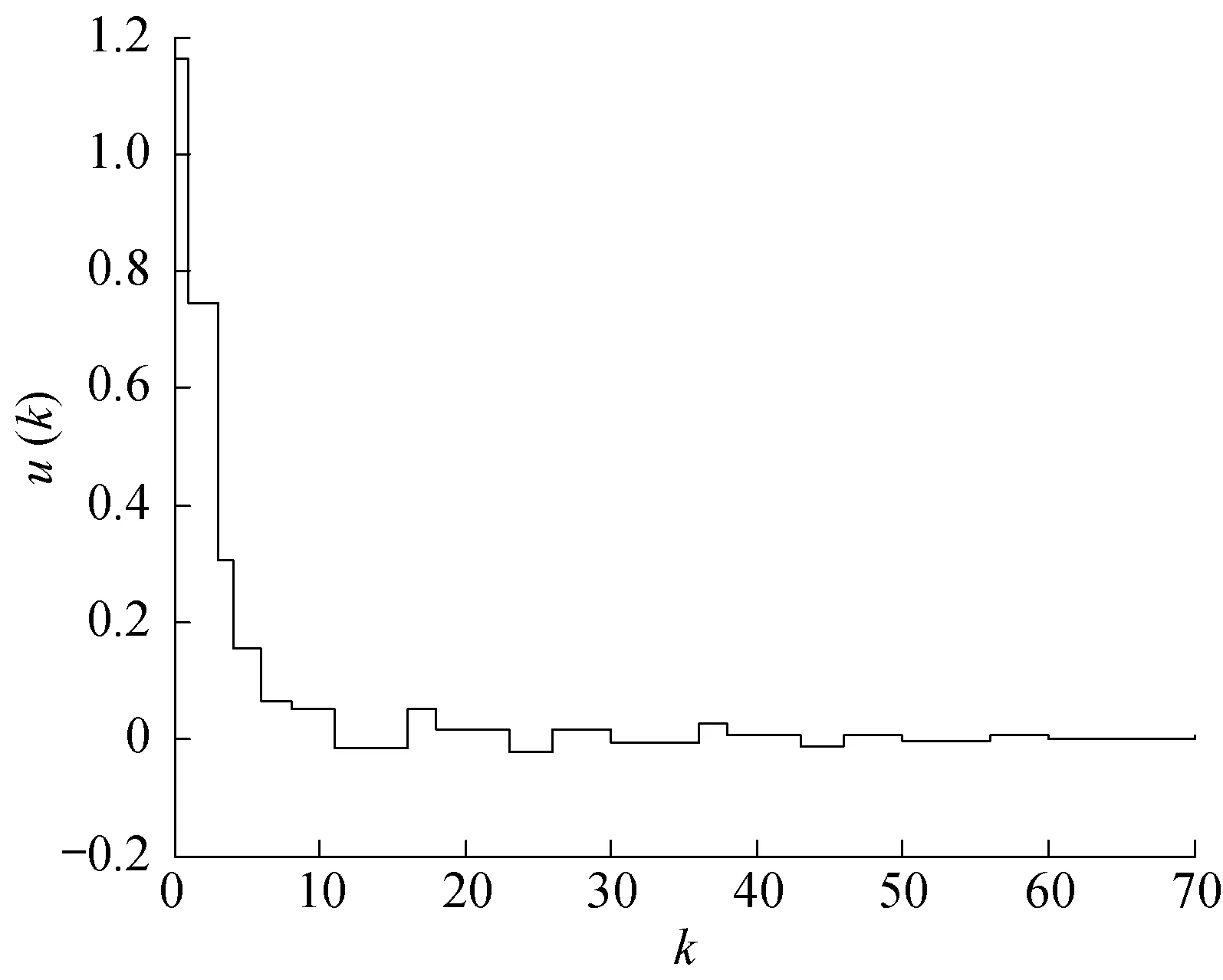
图3 控制信号
为了进一步验证本文带有量化的事件触发预测控制算法的有效性,将本文方法与文献[8-9]中仅考虑量化(没有丢包)情况下的时间触发预测控制算法进行了比较,仿真结果如图6所示。可以看到,本文提出的基于事件触发的预测控制策略可以达到与文献[8-9]方法相近的控制效果,但却减少了计算量和通信资源。

图4 事件触发时刻

图5 事件触发预测控制与时间触发预测控制性能指标对比图
为了说明事件触发条件对本文方法的影响,在其他条件保持不变的情况下,分别选取μ=0.2和μ=0.8,其事件触发时刻对比图如图7所示,其中幅值为1和0的时刻分别代表μ=0.2时的事件触发时刻和事件不触发时刻;幅值为0.8和0.2的时刻分别代表μ=0.8时的事件触发时刻和事件不触发时刻。当μ=0.2时,有27.14%的状态信息需要被传送到控制器;当μ=0.8时,只有15.71%的状态信息需要被传送到控制器。参数μ的变化会影响事件触发的次数。

图6 本文事件触发预测控制与文献[8-9]仅考虑量化(没有丢包)情况下的时间触发预测控制性能指标对比图
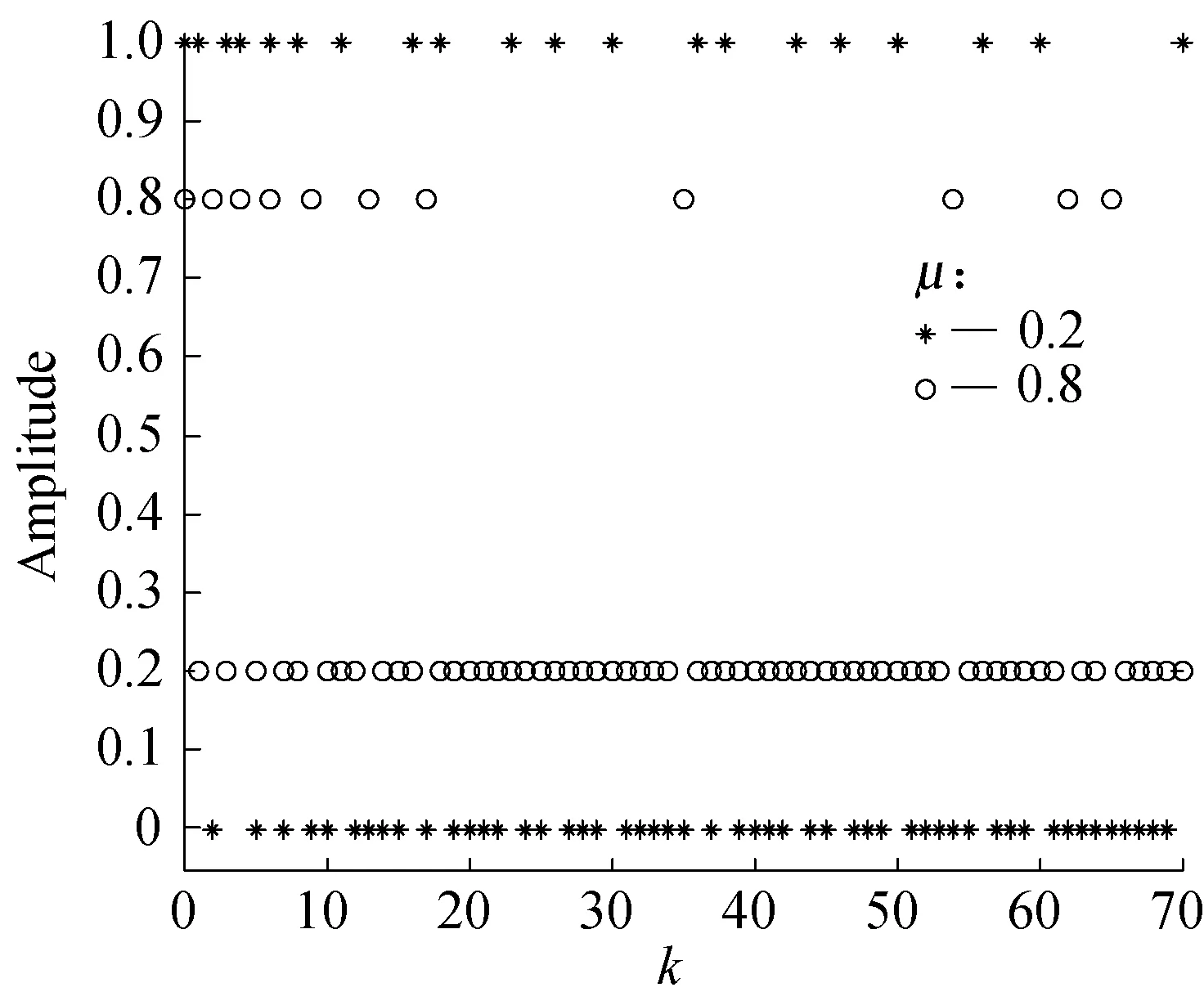
图7 事件触发时刻对比图
4结论
本文针对带有量化信号的网络控制系统,提出了基于事件触发的预测控制方法,并给出了保证闭环系统稳定性的充分条件。该方法减少了网络控制系统信息通信量,同时有效降低了控制器的在线计算量。在今后的工作中,我们将继续考虑系统中存在外界扰动的情况。
参考文献:
[1]GUPTA R,CHOW M.Networked control system:Overview and research trends[J].IEEE Transactions on Industrial Electronics,2010,57(7):2527-2535.
[2]HESPANHA J,NAGHSHTABRIZI P,XU Yonggang.A survey of recent results in networked control systems[J].Proceedings of the IEEE,2007,95(1):138-162.
[3]游科友,谢立华.网络控制系统的最新研究综述[J].自动化学报,2013,39(2):101-118.
[4]邢江,关治洪.网络化控制系统的研究现状与展望[J].控制工程,2006,13(4):294-297.
[5]ZHANG Lixian,GAO Huijun,KAYNAK O.Network-induced constraints in networked control systems:A survey[J].IEEE Transactions on Industrial Informatics,2013,9(1):403-416.
[6]ELIA N,MITTER S.Stabilization of linear systems with limited information[J].IEEE Transactions on Automatic Control,2001,46(9):1384-1400.
[7]FU Minyue,XIE Lihua.The sector bound approach to quantized feedback control[J].IEEE Transactions on Automatic Control,2006,50(11):1698-1711.
[8]ZOU Yuanyuan,LAM JAMES,NIU Yugang,etal.Constrained predictive control synthesis for quantized systems with Markovian data loss[J].Automatica,2015,55(1):217-225.
[9]TANG Xiaoming,DING Baocang.Model predictive control of linear systems over networks with data quantization and packet losses[J].Automatica,2013,49(5):1333-1339.
[10]ÅSTRÖM K,BERNHARDSSON B.Comparison of periodic and event based sampling for first order stochastic systems[C]//Proceedings of the 14th IFAC World Congress.Berlin Heidelberg:Springer,1999,301-306.
[11]PENG Chen,YANG Taicheng.Event-triggered communication andHcontrol co-design for networked control systems[J].Automatica,2013,49(5):1326-1332.
[12]QU Fenglin,GUAN Zhihong,HE Dingxin,etal.Event-triggered control for networked control systems with quantization and packet losses[J].Journal of the Franklin Institute,2015,352(3):974-986.
[13]LIU Guoping.Predictive controller design of networked systems with communication delays and data loss[J].IEEE Transactions on Circuits and Systems,Ⅱ:Express Briefs,2010,57(6):481-485.
[14]ZOU Yuanyuan,CHEN Tongwen,LI Shaoyuan.Network-based predictive control of multirate systems[J].IET Control Theory and Applications,2010,4(7):1145-1156.
[15]朱宇蒙,李少远.网络化控制系统的预测控制方法设计[J].控制工程,2013,20(3):426-430.
[16]LEHMANN D,HENRIKSSON E,JOHANSSON K H.Event-triggered model predictive control of discrete-time linear systems subject to disturbances[C]//European Control Conference.Zurich:IEEE,2013:1156-1161.
[17]YIN Xiuxia,DONG Yue,HU Songlin.Model-based event-triggered predictive control for networked systems with communication delays compensation[J].International Journal of Robust and Nonlinear Control,2015,25(18):3572-3595.
Event-Triggered Model Predictive Control with Quantizations
WANG Quan,ZOU Yuan-yuan,NIU Yu-gang
(Key Laboratory of Advanced Control and Optimization for Chemical Processes,Ministry of Education,East China University of Science and Technology,Shanghai 200237,China)
Abstract:This paper investigates the design problem of the event-triggered model predictive control for networked control system (NCS),in which the signals will be quantized when transmitted from the sensor to controller and controller to actuator.The networked model with event generator is established and the event-triggered scheme is designed.And then,a model predictive control method is presented.The stability condition for closed-loop system is derived.Finally,a numerical simulation is given to illustrate the effectiveness of the proposed scheme.
Key words:networked control system; quantization; predictive control; event-triggered
收稿日期:2015-06-05
基金项目:国家自然科学基金(61273073,61374107);上海市优秀技术带头人(14XD1420900);中央高校基本科研业务费专项资金
作者简介:王权(1990-),女,山东荣成人,硕士生,研究方向为事件触发预测控制。E-mail:quanwang2014@gmail.com 通信联系人:邹媛媛,E-mail:yyzou@ecust.edu.cn
文章编号:1006-3080(2016)02-0240-07
DOI:10.14135/j.cnki.1006-3080.2016.02.014
中图分类号:TP273
文献标志码:A
猜你喜欢
东方教育(2016年9期)2017-01-17
未来英才(2016年16期)2017-01-11
历史教学·高校版(2016年10期)2017-01-05
吉林省教育学院学报(2016年8期)2016-12-26
科学与财富(2016年18期)2016-12-22
考试周刊(2016年79期)2016-10-13
考试周刊(2016年72期)2016-09-20
求知导刊(2016年3期)2016-04-21
电脑知识与技术(2016年2期)2016-03-22
