
割草机器人EMC要求与设计对策
2016-09-21 08:13周国杨
电动工具 2016年4期
周国杨
( 江苏苏美达五金工具有限公司,江苏 南京 210061 )
割草机器人EMC要求与设计对策
周国杨
( 江苏苏美达五金工具有限公司,江苏 南京210061 )
基于割草机器人系统EMC设计的技术总结,分析边界线负载端子骚扰电压形成机理和特点,采取将边界信号由方波调整为梯形脉冲,串联电阻均衡边界线阻抗并加强电源端和边界线负载电路滤波的方法抑制传导辐射。经检测,各项指标达到欧盟相关EMC标准要求。
割草机器人;电磁兼容;电子边界线
0 引言
电磁兼容性(EMC)是指设备或系统在其电磁环境中符合要求运行,不对其环境中的其它设备产生有害的电磁干扰及自身在电磁环境中的抗干扰能力。随着电子技术不断发展,电磁频谱的应用越来越广泛,不可避免带来更多电磁污染。在产品研发过程中,EMC设计技术显得至关重要,其应用也更加深入和注重细节。本文就此对割草机器人系统的EMC设计做简单介绍。
1 概述
割草机器人作为我国机电类产品中的一种,目前主要出口欧美市场,具有巨大市场潜力。出口欧洲产品应满足欧盟EN 55014-1:2006 +A1:2009+A2:2011、EN 55014-2:2015、EN 61000-3-2:2014和 EN 61000-3-3:2013的EMC标准。这些标准目的是对家用电器、电动工具和类似器具的射频骚扰电平建立一个统一的要求,确定骚扰限值、描述测量方法、使运行条件和结果标准化。苛刻的EMC标准成为了外销企业的技术瓶颈。一些企业在产品研发初期,仅仅关注产品的功能设计而忽视产品EMC,最终导致企业因此遭受损失。
2 产品原理
割草机器人被广泛应用于庭院草坪的修剪和维护,电池驱动的高速切削系统将草打成细小碎片并均匀地散落到草的根部,自然分解腐烂,省去了碎草收集和清除工作。割草机器人的出现节省了人力,解决了以往汽油割草机的噪声和燃油污染问题。
割草机器人可自主工作,以单片机为系统控制核心,融合运动控制、多传感器检测和路径规划等技术,系统结构如图1所示。该系统由割草机器人、基站和边界线组成。基站由开关稳压电源、充电模块和边界信号模块组成;割草机器人由主控单片机、传感器模块、割草与行走电机驱动、通信模块及电池模块组成。主控单片机是割草机器人的核心部分,处理传感器模块收集到的信息,将较为复杂的环境变量转化为相对简单的信号反馈给电机驱动,并按单片机程序设定规划路径运行。
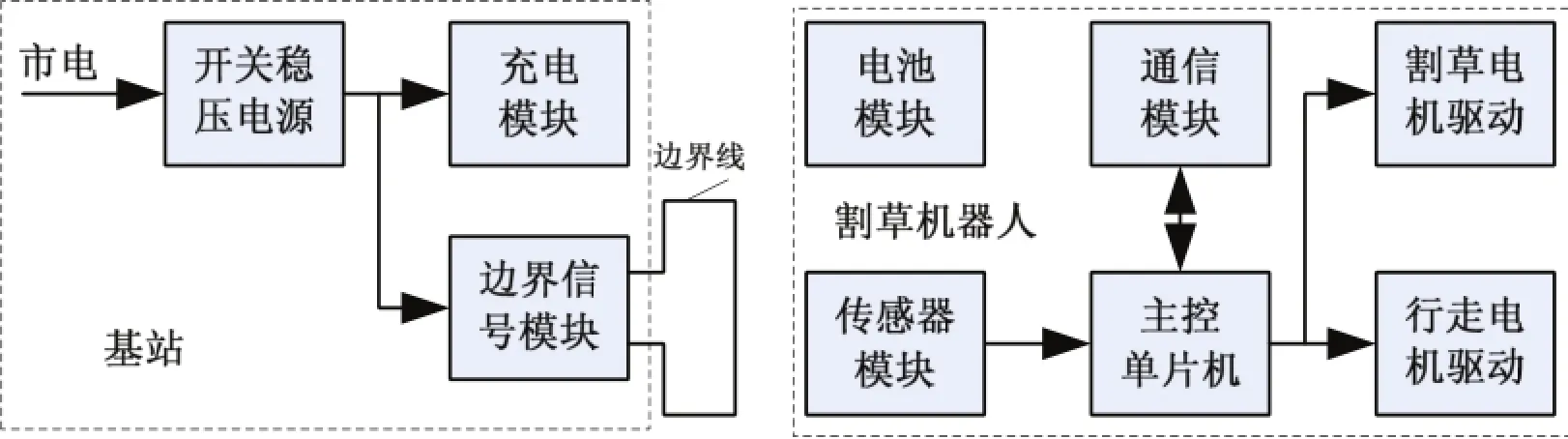
图1 割草机器人系统结构
3 辐射分析
根据EMC理论及检测标准,骚扰辐射按其传播途径分为通过电源线、信号线等导体传播的传导骚扰和以电磁波形式向周围空间发射的辐射骚扰。
3.1 传导骚扰
1)边界线传导骚扰采用测量边界线端子的骚扰电压来评测
割草机器人普遍采用电子边界为边界传感器提供边界信号,规划割草机器人的工作范围。电子边界由一根长导线围成,导线长度一般大于100m,其电气特性是感性负载,即RB+LB。图2所示为信号时序和边界线输出电路。边界信号特征是:周期20ms、发送2个间隔200us、脉宽100us电流脉冲,用傅里叶级数展开其有很丰富的频谱分量。
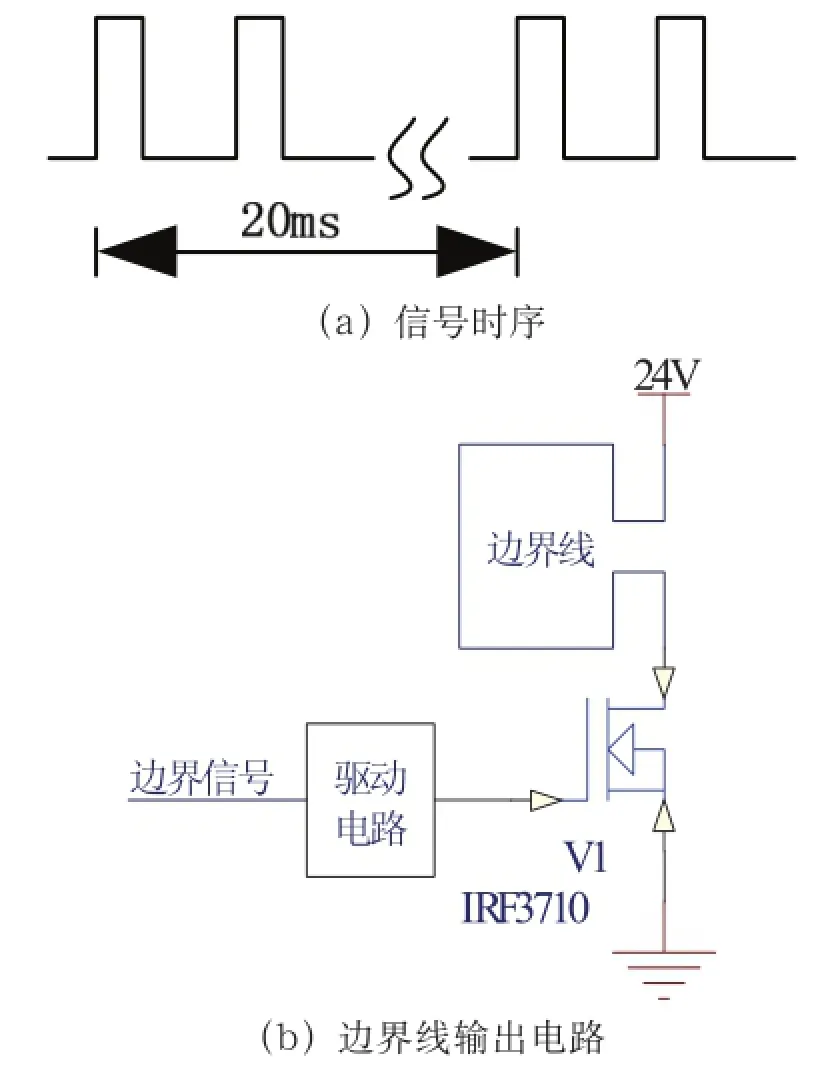
图2 信号时序和边界线输出电路
实际工作时,边界信号采用间歇式、方波脉冲方式通过MOS功率管驱动边界线,开关脉冲上升和下降时间很短,峰值电流可达数安培,根据电磁感应原理,LBdi/dt值会很大,由此边界线输出电路产生较强电磁干扰(EMI)。边界线的长度使得0.15MHz~30MHz带宽内有较多频率点满足1/4λ或1/2λ产生天线效应的条件,其结果使传导辐射功率大幅增强,试验中边界线附近中短波广播接收机均受到干扰。此外,通过传导方式反馈到电源输入端,影响系统的EMC性能指标。
值得注意的是EN 55014-1:2006+A1:20 09+A2:2011中并没有对割草机器人边界线的EMC作明确要求,产品设计人员若在此处疏忽大意,则只能通过事后整改加以弥补,增加时间成本和制造成本。
2)交流电源端传导骚扰用测量电源端子的骚扰电压来评测
系统由开关电源供电,开关电源工作在脉冲状态,自身会产生很强的电磁骚扰,这种干扰既有共模,也有差模。在1MHz以下以差模为主;在1MHz以上以共模为主,这种干扰反向传输到交流电源线输入端子向外发射,影响其它电子设备。除此之外,交流电源端的骚扰电压还受到边界线信号的影响。
3.2 系统辐射
割草机采用塑料机体且是一个移动电子设备,其内含高速数字信号处理等电子电路,多个功率电机驱动,各种电磁骚扰通过PCB走线、内部互连线与接口线电缆向空间辐射电磁波,形成辐射骚扰。由于割草机采用塑料机壳,常用的接地和屏蔽方法较难有效实施,无法对电磁辐射骚扰进行抑制。
4 解决方法
传导骚扰检测频率范围为0.15MHz~30MHz,对应割草机器人来说,需要抑制开关电源、边界信号产生的高di/dt干扰在交流电源端子产生的连续骚扰和边界线负载端连续骚扰。相对于传导骚扰来说,割草机器人辐射骚扰频率范围为30MHz~1GHz,较易满足标准要求。
4.1 边界线传导骚扰抑制对策
针对上述分析,边界线负载端子骚扰电压采取以下措施降低:
1)将方波边界信号转变为梯形信号,降低谐波分量的幅值。MOS管驱动端串接电阻R1,与MOS管输入电容Ciss构成积分电路,调整R1可增加方波脉冲上升和下降时间并形成梯形脉冲。
2)根据边界线长度,通过串联小阻值功率电阻方式,对其阻抗参数进行适当均衡处理,防止边界线负载电流幅值大幅波动。
3)边界线输出端、MOS管输出端与边界线之间分别串接EMI滤波器,防止边界信号的EMI干扰反馈到系统电源输入端以及边界线上。
改进后边界信号驱动电路如图3所示。

图3 改进后边界信号驱动电路
4.2 电源输入端子传导骚扰抑制对策
在电源输入口处安装电源滤波器是保证通过射频传导发射试验测试的有效方法,一种应用于开关电源的典型电源滤波器如图4所示。
两级电源滤波器能够对差模和共模噪声提供更大的阻抗不连续性,从而得到更大的衰减量。跨接于相线与中线间的电容C1(0.22μF)、C4(0.1μF)用来抑制差模噪声,由于两线间属于低阻状态,电容取值较大;相线或中线与地并联电容C2与C3、C5与C6旁路高频共模噪声到地,由于两线与地间属于高阻状态,电容取值较小,还可以减小并联电容产生的漏电流,提高安全性。滤波器在0.2MHz~20MHz带宽内有较大的插入损耗,可达到40dB以上,可有效抑制噪声。

图4 一种典型的电源滤波器电路
4.3 系统辐射骚扰抑制对策
割草机具有非屏蔽结构的移动设备特点,接地和屏蔽措施较难达到良好效果,需通过PCB设计、内部电缆线布局及长度控制等措施以达到EMC标准要求。
4.3.1 电路板抗干扰设计
1)电路板
系统主板采用四层PCB板,1、4层为信号层,3层为地线层,2层为电源层。多层板提供最短的回流路径,减小耦合面积,抑制差模干扰;分配专门的地层和电源层,并且地层和电源层紧耦合,降低电源平面的公共交流阻抗,从而抑制共模干扰。顶层(TOP)下部为电源层,元器件的电源引脚可以直接接到电源,无须穿越地层。关键的信号,如时钟线、电机功率线等,布在低层(BOTTOM),使得重要的信号走线空间更大,与地线层距离更近。器件尽可能选用贴片元件(SMT元件),减小引线电感和体积,有利于提高EMC性能。
2)布局
为获得主板控制系统的最佳性能,元器件布局至关重要。电路进行模块化归类,应根据模块的电路特性进行布局。原则上,电机控制功率模块靠近电源端,功率走线与地线尽可能宽;模拟小信号模块远离数字控制模块和功率模块,并使模拟地与数字地在电源接地端交汇,以避免发生数字干扰模拟的现象;时钟也是一个主要干扰源,晶振外壳接地,时钟走线尽量短并与地线并行走线,起屏蔽效果可以吸收部分辐射干扰。
3)滤波
滤波是一种抑制电磁干扰最常用、最有效方法之一。在电源线或芯片电源端串接贴片铁氧体磁珠,利用铁氧体材料所体现的电感,在高频下铁氧体磁芯的涡流损耗转换成焦耳热,即可简便而有效消除存在于线上的高频电磁噪声。对PCB所涉及的集成电路(IC)的电源端加贴片铁氧体磁珠,磁芯两端加电容构成П型滤波器,是典型有效抑制电源引入高频噪声的方法。
4.3.2 系统抗干扰设计
由前图可知,系统干扰源主要来源是基站和割草机器人。在采取上述系列抗干扰措施基础上,基站采取整改边界信号特征,降低开关速率;对边界信号电流幅度加以限制,割草机充电时关停边界信号,减小不必要的信号辐射。对割草机而言,精心布置模块电缆走线及控制走线长度;尽可能做好系统模块之间接地,电机控制线远离控制线和通信接口线。
5 EMC测评
设计完成并经过EMC整改的割草机器人系统,在试验室进行了边界线负载端子传导骚扰电压测评、电源输入端子传导骚扰电压测评和系统辐射骚扰电场测评。
5.1 传导骚扰电压
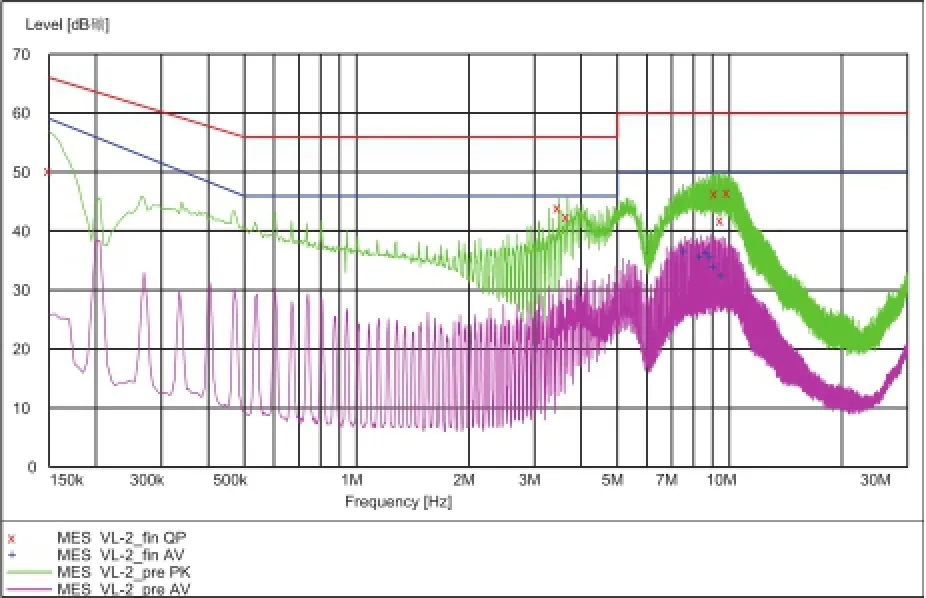
1)边界线负载端子传导骚扰电压测评
按照传导骚扰电压测量标准规定的测量、设施及要求,测量频率范围为0.15MHz~30MHz。对割草机器人系统的边界线负载端子传导骚扰电压进行测量,并对边界信号输出电路的电阻R1阻值进行调整,当R1=3.0K~3.6K时,边界线负载端子传导骚扰电压抑制达到最佳效果。边界线负载端子传导骚扰电压频谱如图5所示,整个带宽内满足EMC标准设计要求。
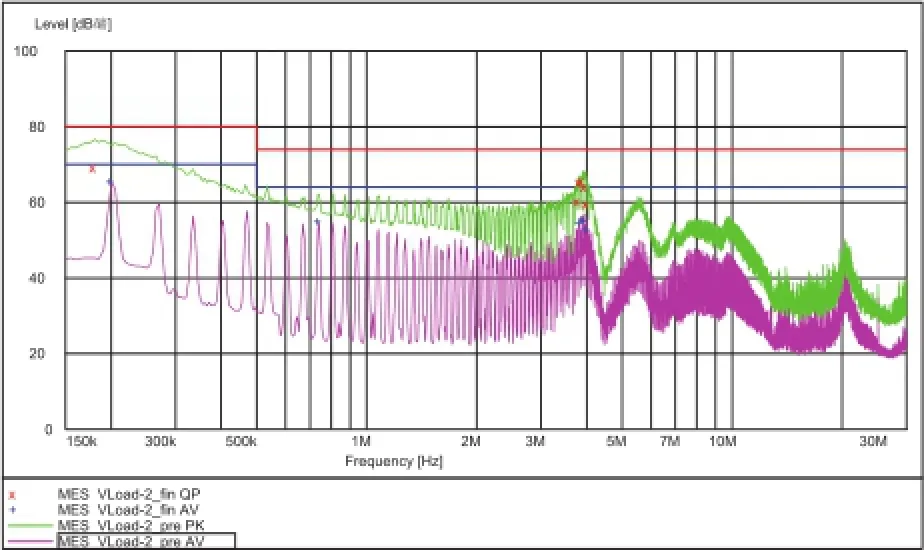
2)电源输入端子骚扰电压测评
按照传导骚扰电压测量标准规定的测量、设施及要求,测量频率范围为0.15MHz~30MHz。对割草机器人系统的电源输入端子传导骚扰电压进行测量,电源输入端子传导骚扰电压频谱如图6所示。测量结果表明,整个带宽内满足EMC标准设计要求。
5.2 系统辐射电场
按照辐射骚扰电场测量标准规定的测量、设施及要求,测量频率范围为30MHz~1GHz。对割草机器人系统辐射的骚扰电压进行测量,系统辐射骚扰电压频谱如图7所示。由图可知,EMC辐射骚扰指标高端余量较大,低端相对小点,显示系统电磁干扰主要在中低频段。

图7 系统辐射骚扰电压频谱
6 结语
本文试对割草机器人系统EMC设计技术总结,特别是对边界线负载端子骚扰电压形成机理和特点进行分析,通过反复实验、电路参数调整及整改,传导辐射骚扰电压得到有效抑制。系统EMC经有关检测机构检测,各项指标达到了欧盟EMC标准要求,保证了系统的正常运行,产品使用效果良好。
[1]朱文立.电磁兼容设计与整改对策及案例分析[M].北京:电子工业出版社,2012.
[2]Keith Armstrong.电子产品实用EMC设计技术[M].李晓辉,译.北京:清华大学出版社,2013.
[3]黄杰,苏谢祖.自动割草机的设计[J].嵌入式技术,2010,36(8):33-37.
[4]汪泉弟,安宗裕,郑亚利,等.电动汽车开关电源电磁兼容优化设计方法[J].电工技术学报,2014,29(9):225-230.
[5]Abraham I,Pressman.开关电源设计[M].王志强,译.北京:电子工业出版社,2006.
[6]白同云.嵌入式机器人控制器的电磁兼容设计[J].安全与电磁兼容,2010(5):70-72.
[7]李晓辉.卫星射频接收机电磁兼容防护设计方法[J].空间电子技术,2014(3):91-93.
[8]史建华,钱振宇.片式铁氧体磁珠及其应用[J].电源技术应用,2009,12(7):17-23.
Requirements and Design Strategy for EMC of Robotic Lawnmowers
Zhou Guoyang
(Jiangsu SUMEC hardware & tools Co., LTD., Nanjing, 210061, China)
Based on the summary of EMC design technology of robotic lawnmowers system,analyzes the formation mechanism and characteristics of the disturbance voltage of the load terminals on the boundary line. Then the boundary signal is adjusted to trapezoidal pulse instead of square wave, series resistance balances boundary wire impedance, and filter is strengthened for the power supply port and the boundary wire load circuit. Professional testing results show that, the EMC technical target of the robotic lawnmower has reached the EU standards.
robotic lawnmower; EMC; electronic boundary wire
TM930.12
A
1674-2796(2016)04-0004-05
2016-05-20
周国扬(1964-),男,大学本科,高级工程师,主要从事智能化家电等方向研究。
猜你喜欢
第二课堂(课外活动版)(2022年5期)2022-05-25
建筑与预算(2022年2期)2022-03-08
汽车维护与修理(2020年15期)2020-02-04
小学科学(学生版)(2019年10期)2019-11-16
中国外汇(2019年23期)2019-05-25
学生天地·小学中高年级(2018年5期)2018-09-07
学生天地(2018年14期)2018-09-07
汽车电器(2018年1期)2018-06-05
智慧少年(2017年8期)2018-01-10
中国环境监察(2017年5期)2017-10-23
