
低成本三维激光扫描仪的设计与实现
2016-12-20 09:59宗文鹏李广云
测绘通报 2016年11期
宗文鹏,李广云,王 力
(信息工程大学,河南 郑州 450001)
低成本三维激光扫描仪的设计与实现
宗文鹏,李广云,王 力
(信息工程大学,河南 郑州 450001)
三维激光扫描仪是目前三维空间信息获取中最先进的仪器,但商业三维激光扫描仪价格昂贵,限制了其广泛应用。本文利用二维激光扫描仪、角度编码器与精密转台设计了一款低成本中距离三维激光扫描仪,系统介绍了其扫描原理、硬件组成及软件实现,并对室内场景的扫描和平面特征识别进行了定性分析,还通过平面拟合与点位精度测试进行了定量分析,结果显示所得激光扫描点云数据质量较好。
低成本三维激光扫描仪;角度编码器;精密转台;点云
三维激光扫描技术是一门新兴的空间三维信息获取技术,是测绘领域继GPS技术后的又一次技术革命[1],是当前该领域研究的热点之一。它突破了传统的单点测量模式,可以快速、准确、无接触地获取目标表面的海量三维信息,实现了实物的数字化,因而又被称为实景复制技术。目前,三维激光扫描技术已被广泛应用于数字城市、虚拟现实、数字测图、逆向工程、考古与文物保护、游戏及电影制作等领域[2-4]。国外在该方面的研究起步较早,技术相对先进,产品相对成熟,并且已可为用户提供完整高效的解决方案。生产三维激光扫描仪的厂商主要有奥地利的Riegl公司、瑞士的Leica公司、加拿大的Optech公司、美国的Trimble、Faro和Metris公司,以及日本的Topcon公司等;国内几家公司也推出了自主研发的几款产品,但是目前三维激光扫描仪仍主要依赖进口。
进口的三维激光扫描仪虽然性能优良,但是其动辄上百万的昂贵价格限制了其广泛应用,并且在某些精度要求较低的应用中显得性能过剩。为此,国内外一些学者开始试图探索开发低成本或专门用途的三维激光扫描仪。Surmann[5]、Hähnel[6]、Morales[7]等采用伺服装置驱动二维扫描仪俯仰运动实现了三维扫描(原理如图1(a)所示),成功用于机器人避障防撞及地形测量。Oliver[8]同样利用伺服电机驱动使二维扫描仪绕其扫描线中线滚动实现三维扫描(原理如图1(b)所示),可以快速、高密度地获取前方感兴趣区域的信息。Paulo[9]利用步进电机与二维扫描仪成功开发了一款可用于三维重建的低成本三维激光扫描仪。Julian等[10]在二维扫描仪上加装旋转反射镜,实现了用于室内机器人导航的三维扫描。逄永涛[11]用二维位移台和激光测距仪构建了一个自由曲面三维激光扫描仪,可用于小型物体的逆向工程。本文将二维激光扫描仪侧倒安置在电控转台上并结合高精度角度编码器实现了对场景的360°三维扫描(原理如图1(c)所示)。

图1 二维激光扫描仪实现三维扫描的方案
一、三维扫描测量原理
实现三维扫描的一种常用方案是利用标准二维扫描仪加一个机械执行机构,执行机构可以是步进电机或伺服电机,甚至是更加直接可用的精密电控转台。二维激光扫描仪和执行机构结合时,扫描平面和旋转轴的不同安排会导致不同的扫描视场及点云分布,其共同点是绕某个轴旋转会导致靠近该轴的区域点云密度高。由于该密度分布可能集中在非感兴趣区域或导致测量性能无法被充分利用,因而应根据实际需要来确定扫描方式。本文所要设计的是一款室内外均可用的大视场中距离三维激光扫描仪,因此采用如图1(c)所示的组合方式。
本文所用二维激光扫描仪基于时间飞行法原理进行测距,其内部由一个激光发射器发射激光,激光经由分光器分成两路:一路由反射镜反射到被测目标表面;另一路直接进入接收器触发计时器开始计时。而后返回激光被光电接收器接收,计时器停止计时,由该段发射到接收的时间差及光速可以获得激光测距原点(反射镜旋转中心)到目标表面的距离;扫描仪内部的反射棱镜不断匀速旋转,使得激光以一个固定角度增量不断偏转,从而可以得到一系列距离值和角度值,即一条扫描仪线。在此基础上,要实现三维扫描,只需将二维扫描仪侧倒垂直安装在一个旋转平台上。二维扫描仪的测量结果是一个距离值和一个垂直角,要得到三维点坐标还需要一个水平角,即转台转过的角度。为此,本文给电控转台加装一个增量式角度编码器来测量转台转过的角度。所用SICK二维扫描仪可直接与该编码器连接,得到对应每条扫描线转台的位置和速度。以二维扫描仪光学中心为原点,反射镜旋转轴为Y轴,二维扫描中线为X轴,Z轴垂直于XOY平面向上,建立如图2所示的坐标系。
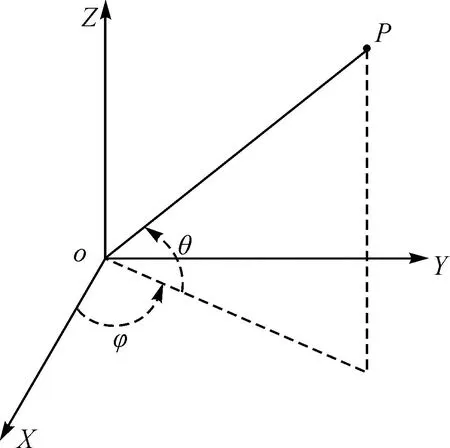
图2 三维扫描坐标系
据此可得到目标点的三维坐标
(1)
二、扫描仪的设计与实现
1. 硬件系统设计
所设计的低成本三维激光扫描仪硬件系统主要由测距模块、测角模块、扫描驱动模块、运动控制模块及电源模块组成,分别对应二维激光扫描仪、角度编码器、高精度电控转台、运动控制器和交直流转换开关电源。
设计目标为:垂直分辨率最高可达0.166 7°,水平分辨率0.01°~1°可调,扫描视场范围为150°×360°,测量范围为1~60 m,单次完整扫描有效点数大于150万,点云数据中包含目标表面反射回来的强度值,并且具有多次回波功能。
(1) 硬件选型
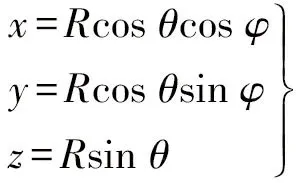
二维激光扫描仪选用SICK公司的LMS511-20100Pro,能够在提供较远测量距离的同时保证较高的测量精度。LMS511系列是SICK公司新推出的高性能室外型二维激光扫描仪,主要用于室外的物体测量及防撞,而其中的LMS511-20100采用小光点的激光,能够较准确地测量物体的尺寸及距离,主要用于测量精度要求较高的应用场合。表1为其主要技术参数[12]。
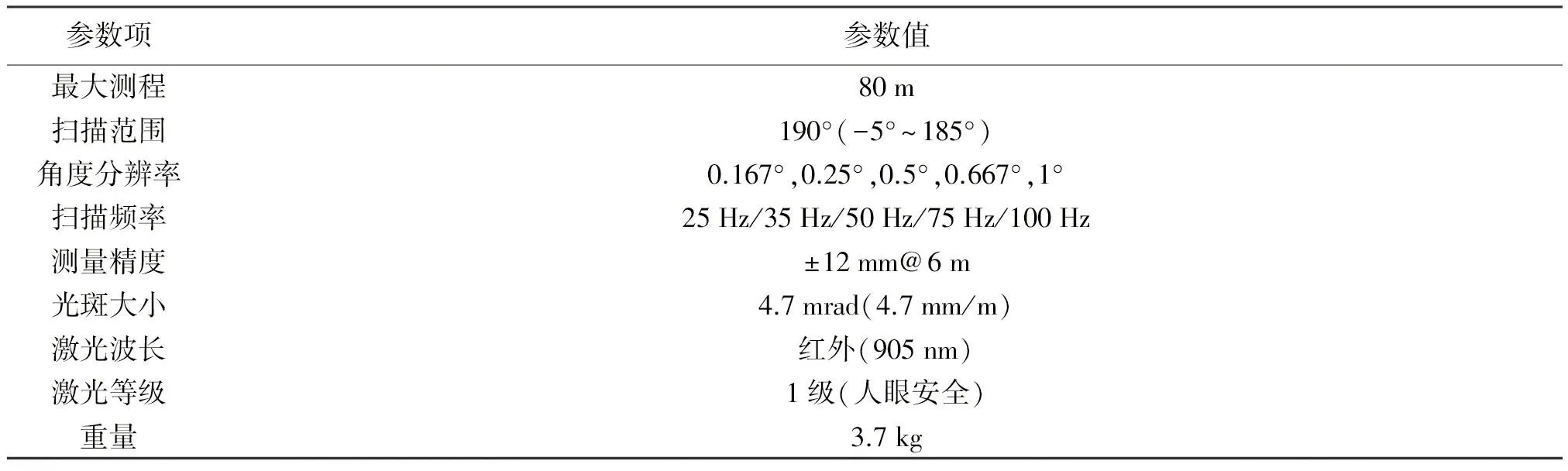
表1 二维激光扫描仪主要技术参数
角度编码器选用SICK公司新一代高分辨率的增量型旋转编码器DFS60,分辨率高达65 536(即0.005 5°),且可通过标准的输出线缆或插头自由设定分辨率。考虑到与转台的连接,选用夹紧法兰型结构的该型编码器,其轴径尺寸为10 mm×19 mm;同时为方便与二维激光扫描仪输入端的连接,编码器的出线方式采用电缆出线式。
电控转台选用武汉华天科远公司的MRSA100,其由步进电机驱动,采用精密蜗轮蜗杆传动和转轴系设计,调整精度高、空回小,可以任意正向和反向旋转。步进电机和蜗杆通过进口高品质弹性联轴节连接,传动同步,消偏性能好,排除空回和形位误差。转台中心通孔与旋转中心严格同轴度要求,中心孔径严格配合公差限制,方便精密定位运动。该转台经细分后分辨率可达0.000 156°,重复定位精度小于0.005°,最大中心承载50 kg。通过RS232接口,配合SC系列运动控制器可对其实现自动化控制。
运动控制器采用与上述转台配套定制的精密运动控制箱,其采用USB通信端口,即插即用,利用G代码编程,便于开发。
SICK二维激光扫描仪LMS511-20100Pro和角度编码器DFS60的工作电压均为24 V DC±20%,故在室内时采用220 V交流转直流开关电源来供电,在室外时采用24 V蓄电池供电。
(2) 硬件连接
角度编码器通过安装法兰从底面与转台连接固定,通过输出线缆将其输出的AB两相分别与二维激光扫描仪输入端的IN3和IN4两线相连(如图3所示);通过专用编程工具设置编码器的输出信号为HTL。二维激光扫描仪通过一个承载连接件采用螺栓结构与转台固连在一起,使扫描仪光学中心位于转台旋转轴上。转台通过RS232与运动控制箱连接,运动控制箱通过USB端口与笔记本连接,二维激光扫描仪通过以太网端口与笔记本连接,由开关电源同时给二维激光扫描仪和角度编码器供电。系统实物如图4所示。
图3 角度编码器接线图
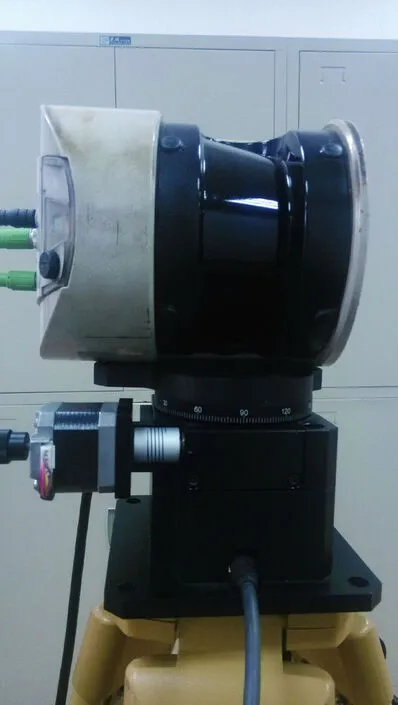
图4 系统实物
2. 软件系统设计
二维扫描仪通过以太网与上位机通信,利用MFC封装的CSocket类编程实现设备连接、参数设置、指令发送和数据接收;利用厂家提供的SkytAX控件编程实现对转台的控制。数据获取部分需要完成的功能主要有扫描仪连接、扫描参数设置、数据接收解算及保存等,软件设计流程如图5所示。

图5 数据采集流程
每一帧扫描数据中只包含一个转台位置即扫描仪水平转过的角度,该角度是在二维扫描过程中185°时进行采样的,因而对应每个二维扫描角度时刻的水平旋转角度需要内插得到(线扫描过程视为匀速运动),根据距离、水平和垂直角度即可得到笛卡尔坐标。
为了保证扫描过程中的软件界面交互,提高数据解算效率,采用多线程技术,设置好二维激光扫描仪与转台的参数后,开启数据接收线程,等待扫描数据。当扫描仪获取的数据超过一定大小时,数据会分包发送,因此需要根据数据帧结构来判断是否接收到一帧完整数据,是则开启工作线程进行数据解码和坐标解算,否则将该次数据保存在缓存中,等待组包解算。当判断水平转过的角度到达所设置的扫描范围时,发送命令停止扫描,并将数据存入文件中。
三、试验分析
1. 定性分析
为测试所设计三维激光扫描仪的性能,对实验室进行了扫描。扫描时垂直和水平分辨率均设为1/6°,转台速度为4.167°,进行了360°扫描,扫描时间为87.4 s,经去噪[13]后共获得1 525 438个有效点。图6为室内场景扫描局部图,从图中可以清晰地看到室内摆放的物品;图7为按灰度显示的360°扫描结果,可以看到扫描起止位置无错位现象,整体扫描效果较好。

图6 室内场景三维扫描局部图
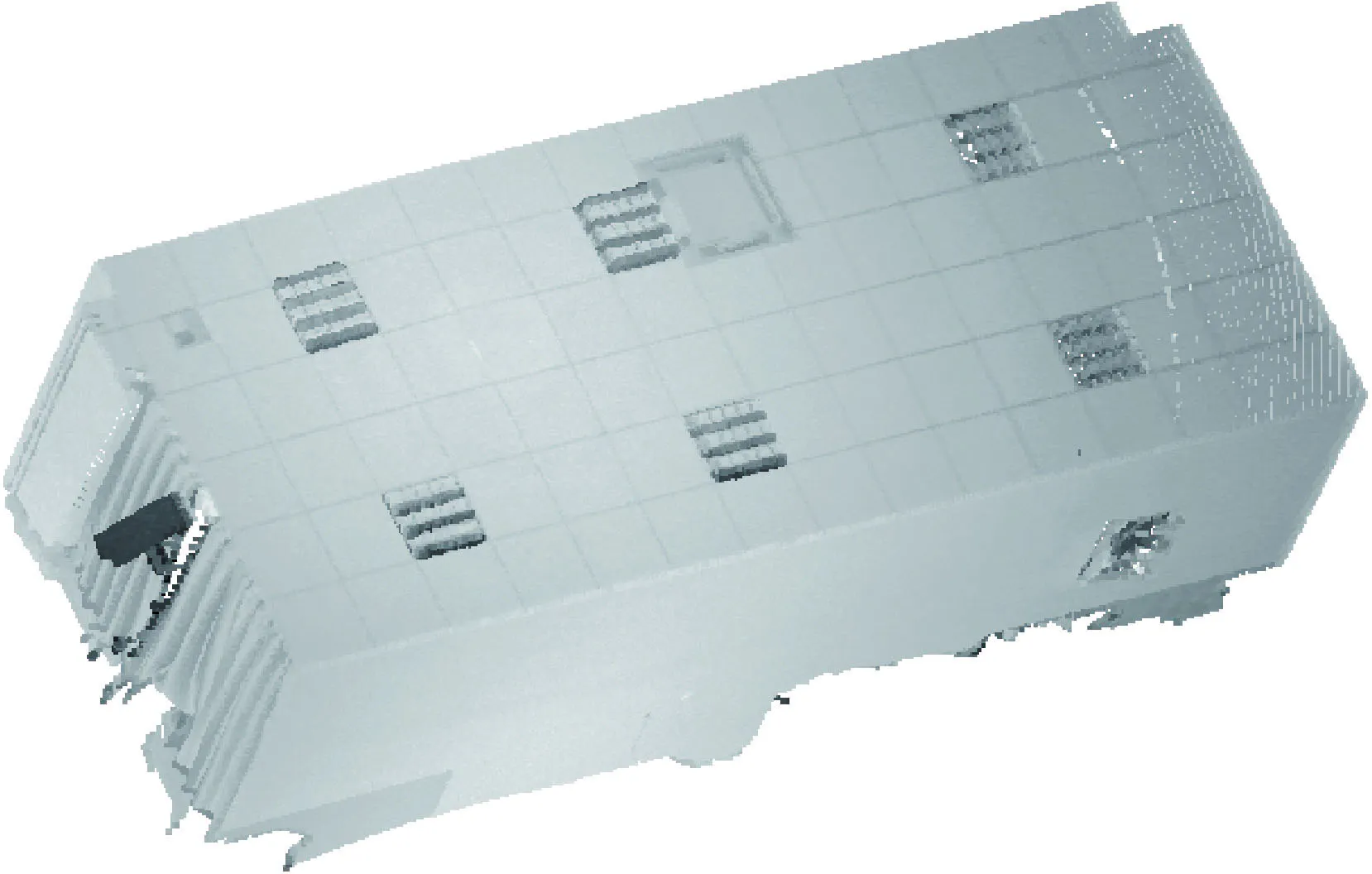
图7 按灰度显示的360°扫描结果
对所获取的点云数据进行平面特征识别,采用生长算法,选取种子点根据生长条件向邻域点传递直到平面边界,该方法能有效识别和区分点云数据中不同的平面,效果如图8所示。
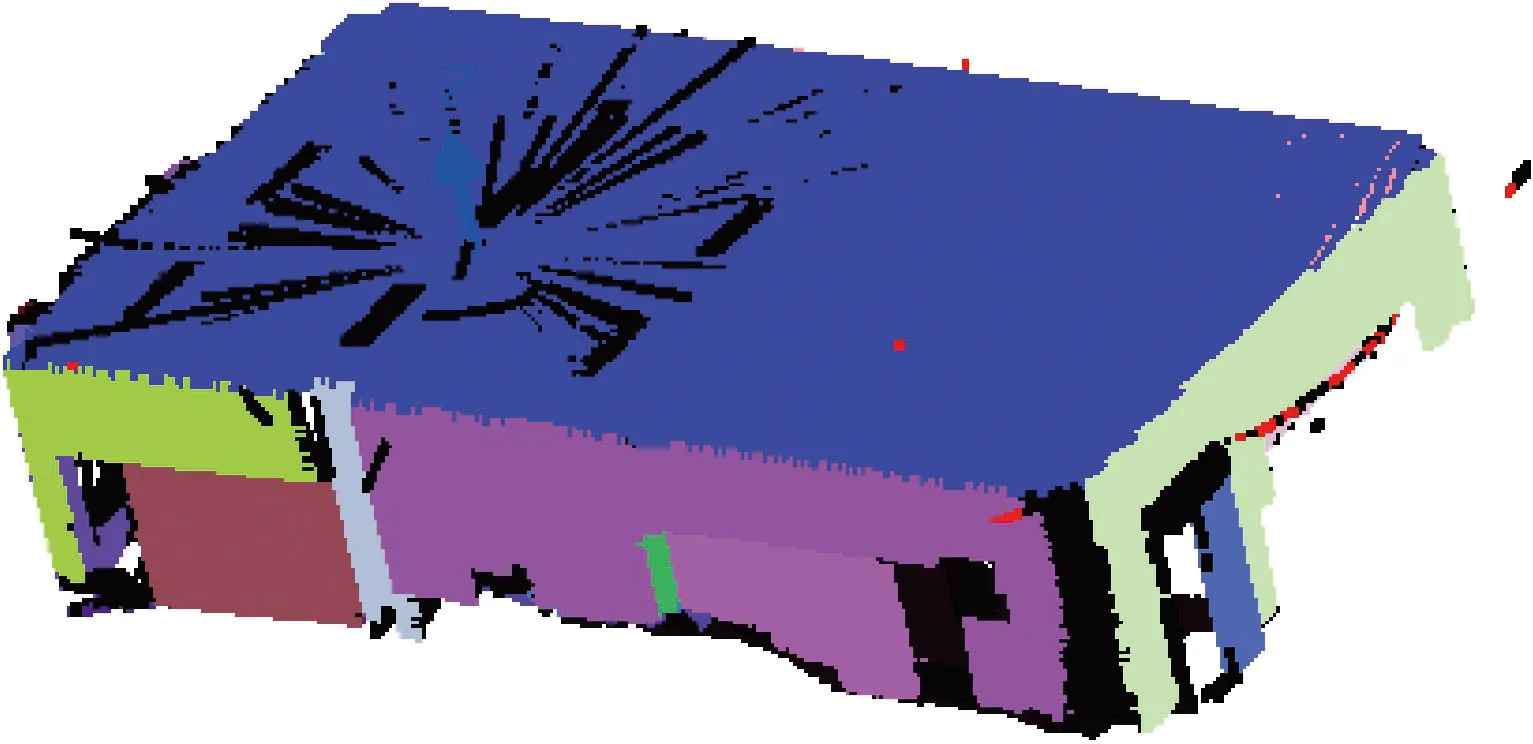
图8 平面识别效果
2. 定量分析
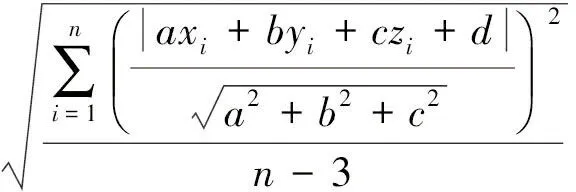
为了检验所获取的点云数据的质量,选取扫描点云中墙面上一块区域(共5578个点)进行最小二乘平面拟合,并将下式作为平面度评价指标,即
(2)
式中,ax+by+cz+d=0为拟合得到的平面方程;(xi,yi,zi)为包含n个点的点集中第i个点的坐标,求得平面度为±3.6 mm,最大偏差为7 mm,考虑到二维激光扫描仪厘米级的测距精度,所得点云数据质量较好。
球形靶标是三维激光扫描中常用的人工标志[14],其中心坐标可作为同名点进行多站点云数据的拼接及仪器精度的测试[15]。空间中布设5个FARO球形标志(半径为72.5 mm),与所设计三维激光扫描仪距离约4 m,水平和垂直分辨率均设为1/6°,进行扫描后提取球面点云,利用RANSAC方法进行球面拟合得到5个球形标志的中心坐标;在相同距离处架设FARO Focus3D X130三维激光扫描仪(25 m处测距精度2 mm),扫描并提取球形标志中心坐标作为基准,将本文所设计低成本扫描仪测得的标志中心坐标转换到该基准坐标系下,计算与基准值的各坐标分量差值Δxi、Δyi、Δzi,用如下公式评价点位精度,即

(3)
求得的点位精度为±2.75 mm,因而所设计的三维激光扫描仪测得的点云数据能以较高精度识别球形标志,可用于进一步的点云数据拼接及性能测试。
四、结束语
三维激光扫描是当前三维空间信息获取中最先进的技术之一,三维激光扫描仪正向着小型化、专业化的方向发展。本文基于二维激光扫描仪设计了一款低成本三维激光扫描仪,介绍了其基本原理及软硬件设计,并通过定性和定量试验证明所得点云数据质量较好。为获得更精确的点云数据,下一步需要对测距结果和系统内参数进行标定。
[1] 马立广.地面三维激光扫描仪的分类与应用[J].地理空间信息,2005,3(3):60-62.
[2] 李杰, 周兴华, 唐秋华, 等. 三维激光扫描技术在数字城市中的应用[J]. 海岸工程, 2011, 30(3): 28-33.
[3] 张序, 李兆堃, 罗小华, 等. 应用三维激光扫描测量进行文物逆向工程恢复[J]. 测绘科学, 2013, 38(6): 169-171.
[4] 彭维吉, 李孝雁, 黄飒. 基于地面三维激光扫描技术的快速地形图测绘[J].测绘通报, 2013 (3): 70-72.
[5] SURMANN H, LINGEMANN K, NÜCHTER A, et al. A 3D Laser Range Finder for Autonomous Mobile Robots[C]∥Proceedings of the 32nd ISR (International Symposium on Robotics). [S.l.]:ISR,2001.
[7] MORALES J, MARTINEZ J L, MANDOW A, et al. Boresight Calibration of Construction Misalignments for 3D Scanners Built with a 2D Laser Rangefinder Rotating on Its Optical Center[J]. SENSORS, 2014; 14 (11): 20025.
[8] WULF O, WAGNER B. Fast 3D Scanning Methods for Laser Measurement Systems[C]∥International Conference on Control Systems and Computer Science (CSCS14). [S.l.]:CSCS,2003: 2-5.
[9] DIAS P, MATOS M, SANTOS V. 3D Reconstruction of Real World Scenes Using a Low-cost 3D Range Scanner[J]. Computer-aided Civil and Infrastructure Engineering, 2006, 21(7): 486-497.
[10] RYDE J, HU H. 3D Laser Range Scanner with Hemispherical Field of View for Robot Navigation[C]∥IEEE/ASME International Conference on Advanced Intelligent Mechatronics. [S.l.]:IEEE, 2008: 891-896.
[11] 逄永涛, 张爱武. 自由曲面三维激光测量系统设计与开发[J]. 系统仿真学报, 2008, 20(9): 341-343.
[12] SICK A G. Data Sheet: Laser Measurement Sensors of the LMS5xx Product Family[EB/OL].[2013-03-15]. www.sick.com.
[13] 李广云, 李明磊, 王力, 等. 地面激光扫描点云数据预处理综述[J].测绘通报,2015(11) : 1-3.
[14] 姚吉利, 马宁, 贾象阳,等. 球形标靶的固定式扫描大点云自动定向方法[J].测绘学报, 2015, 44(4):431-437.
[15] 王瑞鹏, 王力, 李广云, 等. 基于球形靶标的三维激光扫描仪加乘常数测定方法[J].测绘通报, 2014 (S2): 133-134.
Design and Implement of Low-cost 3D Laser Scanner
ZONG Wenpeng,LI Guangyun,WANG Li
2016-01-13 基金项目: 国家自然科学基金(41274014;41501491);现代城市测绘国家测绘地理信息局重点实验室开放基金(20141201WY)
宗文鹏(1990—),男,硕士生,研究方向为多传感器组合测量系统与应用。E-mail: la9881275@163.com
宗文鹏,李广云,王力.低成本三维激光扫描仪的设计与实现[J].测绘通报,2016(11):31-34.
10.13474/j.cnki.11-2246.2016.0359.
P24
B
0494-0911(2016)11-0031-04
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
现代仪器与医疗(2022年2期)2022-08-11
作文小学高年级(2022年3期)2022-04-20
模具制造(2019年3期)2019-06-06
福建中学数学(2018年1期)2018-11-29
制造技术与机床(2017年7期)2018-01-19
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
探测与控制学报(2015年4期)2015-12-15
中国光学(2015年5期)2015-12-09
