
中继通信技术在无人机应急测绘保障中的应用
2016-12-20 09:59周兴霞程多祥廖小露
测绘通报 2016年11期
周兴霞,程多祥,赵 桢,廖小露
(四川省测绘地理信息局测绘应急保障中心,四川 成都 610081)
中继通信技术在无人机应急测绘保障中的应用
周兴霞,程多祥,赵 桢,廖小露
(四川省测绘地理信息局测绘应急保障中心,四川 成都 610081)
近年来,无人机以机动灵活、快速高效的优势,在灾情侦查、灾害调查和灾后重建等应急测绘保障工作中发挥了重要作用,已成为国家航空应急救援体系的组成部分之一。但通信距离短、通信方式单一、地形环境影响大等因素已严重限制无人机在高山区、远距离作业任务等复杂条件下的应急测绘保障应用。本文以提高无人机应急测绘保障能力为核心,研究了一种结合中继通信技术的无人机远距离操控技术。通过开展无线电通信、卫星通信及移动网络通信等多种中继通信方式研究、集成与应用,实现复杂地形环境下的无人机远距离安全操控和灾情地理信息数据快速获取,能够有效提升应急测绘与防灾减灾能力。
无人机;中继通信;应急测绘保障
近年来,无人机航摄系统以机动灵活、快速高效、使用成本低等优点,在突发公共事件发生后“第一时间”灾情地理信息快速获取与共享服务工作中发挥了重要作用[1-2],并成功应用于“4·20”芦山强烈地震、“6·18”以来系列洪灾、“4·25”尼泊尔地震西藏重灾区域等应急测绘保障工作,为各级政府和有关部门开展决策部署、应急救援、灾情评估和灾后重建等工作提供了快速、准确、优质的多源灾情地理信息服务[3-5]。同时,无人机航摄系统主要通过地面无线电台实现地面与航摄平台的通信,存在易受电磁波干扰、通信方式单一、信号易受阻挡等问题,对无人机应急测绘操控距离与飞行安全造成很大的应用局限,难以满足应急时期“长带状”航线飞行及高山峡谷等复杂条件下多源应急影像的快速安全获取[6]。
中继通信技术服务于远距离通信,通过中继方式对信号接收和放大实现信号间的相互传递,在相关领域的应用已较为广泛且成熟[7]。近年来,国外研制的“捕食者”“全球鹰”等中远程无人机系统,普遍采用同步通信卫星作为空中中继平台,构成卫星中继数据链,转发无人机的遥控指令和图像/遥测信息,并充分利用卫星波束的有效覆盖范围,实现无人机的超视距测控和信息传输。但国内外面向小型无人机系统的中继通信技术研究相对较少,无人机在应急测绘保障领域的中继通信技术应用更为稀缺,尚缺少多种通信方式相结合、可应用于应急测绘保障实战的无人机中继通信技术。
本文通过研究应急状态下无线电通信、卫星通信、移动网络通信等通信方式的工作原理[8-10],针对性地解决无人机在山区和远距离获取应急影像数据时通信信号易受阻挡的关键技术,集成了单种和多种中继通信方式的无人机航摄系统,并结合西南地区应急测绘保障工作实际,归纳总结了中继通信网络在提升无人机航摄操控距离和安全性中的应用。最后对应用中存在的技术问题和难点进行讨论,提出相应的解决途径。
一、无人机中继通信工作原理
根据无人机中继通信信号接收来源,中继通信方式可分为无线电通信、卫星通信、移动网络通信等3种手段。无线电中继主要通过中继无人直升机、基于无线分布式系统(WDS)的无线中继、数传电台中继等方式构建中继通信网络。数传电台(radio modem)具有使用成本低、绕射能力强、组网结构灵活、覆盖范围远的特点,较为适合机动性强的小型无人机系统在地理环境复杂和多点协同应急状态下使用。铱星移动通信系统覆盖全球,轨道低、传输速度快、通信质量较高,可满足自然灾害现场、通信落后的边远地区的数传和定位跟踪需求。GPRS无线数传模块是一款内嵌GSM/GPRS核心单元的无线通信终端,广泛应用于GPRS实时数据传输等诸多工业与民用领域。
从应急状态下快速、高效、安全、远距离获取灾情地理信息的需求综合考虑,本文重点研究数传电台、铱星卫星和GPRS移动网络中继通信的工作原理。
1. 数传电台中继通信工作原理
数传电台中继通信主要由两套地面站、一架任务机和一架中继机组成,包含5部数传电台。中继机搭载中继电台和自驾仪电台共两部电台,其中中继电台与任务机自驾仪及任务机地面站电台进行通信,实现任务机地面站对任务机的测控。中继机自驾仪数传电台与中继机地面站电台进行通信。如图1所示。

图1 数传电台中继通信工作原理
2. 铱星卫星中继通信工作原理
将铱星通信模块与无人机(任务机)运载平台及自驾仪集成,实现铱星与自驾仪的遥测遥控数据传输。同时,为解决铱星卫星通信人工拨号操作繁琐且信号连接不稳定的技术难题,研发铱星拨号模块,实现铱星卫星通信模块自动拨号控制。该模块可自动与机载铱星设备进行拨号连接,数据传输过程中如果数据链中断,软件能及时发现并自动拨号重新建立链路连接以确保铱星通信链路的可靠性。如图2所示。

图2 铱星卫星中继通信工作原理
3. 移动网络中继通信工作原理
在无人机(任务机)和地面站分别集成GPRS移动网络通信模块。由于运营商分配给每个模块的IP地址不固定,每次登录的IP地址都不相同,将导致两个GPRS模块之间不能直接进行网络通信。因此,需先指定一个NAT(network address translation)网络地址转换服务器进行IP地址静态分配,再通过在GPRS模块的芯片内植入通信协议,实现GPRS模块间的数据转发。机载GPRS模块读取自驾仪输出的飞行状态监控数据后,上传到NAT网络服务器,无人机地面站同样通过移动网络访问到指定网络服务器,通过实时上传和下载无人机飞行数据,实现通过移动网络通信的方式控制无人机航摄作业。如图3所示。

图3 GPRS移动网络中继通信工作原理
二、中继通信技术在应急测绘保障中的应用
1. 单种中继通信方式在应急测绘保障中的应用
(1) 多种通信方式比较
数传电台中继通信传输频率高、数据传输承载量大,可实现跨越障碍物建立通信链路。但该方式受起降场地限制较大,当起降场地狭窄、地面不平整或只可单向起降时,在起降过程中易受场地或风向影响导致无人机受损或坠毁。若连续起降作业机和中继机,起降风险倍增。
铱星卫星中继通信传输距离远,不受地面站和无人机之间的遮挡干扰,适用远距离和跨越障碍物建立通信链路。但卫星信号传输延时较长,使用费用较高,且地面站架设需选择场地开阔、地面卫星信号接收稳定的区域。
GPRS移动通信中继通信适用于无线网络覆盖区域的远距离和跨越障碍物建立通信链路。但受网络信号强度限制较大,在无网络覆盖区域无法使用,且无线网信号覆盖主要针对地面,在空中衰减较大。当地面信号强度不够时,由于空中信号较弱,通信网络不稳定,不推荐采用该通信模式。
基于以上对3种中继通信方式的比较,需要根据灾区位置、起降场地条件及起降场地相对于灾区的地理位置等因素,合理选择通信方式。以起降场地与灾区间有无遮挡、起降场地困难程度、网络信号覆盖强度、卫星信号强度作为判断依据,按照数传电台中继通信、移动网络中继通信和卫星中继通信的优先级别,设置首选和备份通信方式。当首选通信方式中断后,依据优先级别进行切换选择。
3种通信方式对比情况见表1。

表1 3种中继通信方式对比
(2) 数传电台中继通信方式工作流程
基于数传电台中继通信方式在应急测绘保障中的应用优势,单种中继通信方式在应急测绘保障中的应用将以数传电台中继通信为例。应急队伍到达选择起降场地后,根据应急指令完成中继机和无人机(任务机)任务航线规划、组装、调试等准备工作,测算中继机最低制式高度,操控起飞中继机。待中继机爬升至预设空域平稳飞行且任务机中继通信链路稳定后,起飞任务机执行应急航摄任务。同时,应急航摄任务执行完毕后,应先降落任务机,再降落中继机。此工作流程的优点是一旦中继通信信号不稳定或中断时,地面操控人员可先降落中继机,查找原因并解决问题后重新起飞,这样可以大大提高任务机飞行安全性。
同时,中继机的航线设计为单点按制式圈盘旋,制式圈位置应尽量靠近起飞场地,避开任务航线;制式高度根据起降点位置和高度、测区最远点距离和高度、遮挡物方位和高度等因素共同决定。如图4、图5所示,可通过航摄分辨率要求和相机参数计算出飞行高度H2(H2=相机焦距×地面分辨率÷像元尺寸),根据DEM数据量测山体高度H1、起飞点到山体的距离L1及航线最远点距离起飞点的距离L2;中继机距离起飞点距离近,可将起飞点作为中继机位置计算。中继机最低制式高度h可根据公式:L1÷L2=(H1-h)÷(H2-h)计算得出。
2. 多种中继通信方式在应急测绘保障中的集成应用
在通用挂载接口改造、机舱布局调整的基础上,升级地面站软件,集成开发的通信协议,扩展通信接口,实现无线电台中继通信、卫星通信、网络通信等多种中继通信技术与无人机航摄系统的无缝集成。其中,地面站软件增加了通信链路监测和控制工具栏,并进行链路监控、信号切换等程序设计,实现了各种通信模式的监测、选择和智能切换,解决了应急状态下信号极易中断的突发情况,有效增强了无人机的适应性。同时,开展铱星模块自动拨号技术研究,设计研发了铱星自动拨号硬件模块,并进行了拨号软件研发与嵌入,解决了铱星通信过程中链路易掉线、通信不稳定、不连贯的问题,实现了连通铱星链路或链路中断后自动拨号,保障了铱星通信链路的稳定、连贯。

图4 电台中继通信工作流程

注:L1为中继机与山体之间的距离;H1为山体相对高度;L2为中继机与航线最远点距离;H2为任务机相对飞行高度。图5 电台中继通信示意图
在应急状态下,需根据不同的地形条件、飞行环境选择合适的通信方式,并通过其他方式进行链路备份。以上3种中继通信方式集成应用时,优先级依次为数传电台、GPRS和卫星设计算法。通过应急测绘保障实战应用验证,集成了无线电通信、卫星通信及移动网络通信等通信方式的小型无人机航摄系统,实现了多架无人机在我国西南地区高山峡谷地区不低于114 km的协同应急、远距离操控和实时监控。突破了复杂地形导致的通信信号阻挡等问题,有效提高了低空航空应急监测任务中的远距离实时监控能力。如图6所示。
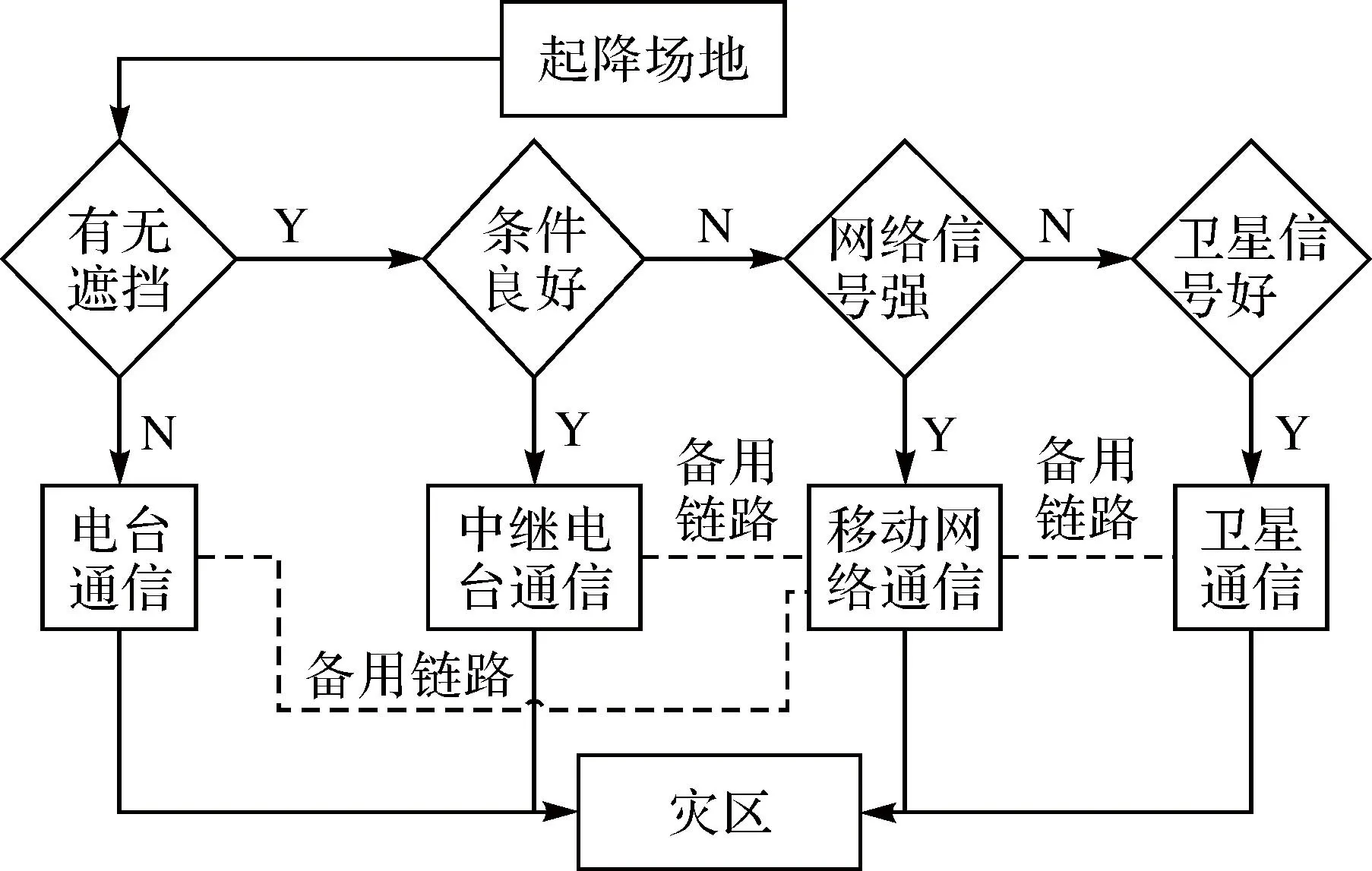
图6 多种中继通信方式在应急测绘保障中的应用流程
三、结束语
本文针对应急测绘保障中无人机远距离航摄通信问题,采用信道编码技术、信道均衡技术、快速捕获技术及多链路冗余备份等关键技术,首次研究了集无线电通信、卫星通信、移动网络通信等多种中继通信方式于一体的无人机航摄系统,实现了小型无人机在不小于114 km的远距离应急测绘保障中继通信应用。无人机中继通信能力的大幅提升,有效解决了在山区和远距离获取应急影像数据时通信信号易受阻挡的问题,增强了无人机应对重大突发公共事件应急测绘保障的能力,为在复杂条件下开展航空应急监测提供了极大的便利。同时,进一步拓宽了通信技术在无人机应急测绘保障和低空摄影测量领域的应用范围。
[1] 崔红霞,林宗坚,孙杰. 无人机遥感监测系统研究[J]. 测绘通报,2005(5):11-14.
[2] 林宗坚. UAV低空航测技术研究[J]. 测绘科学,2011(1):5-9.
[3] 李德仁,李明. 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报(信息科学版),2014(5):505-513.
[4] 汤建国,胡传文,王玲,等. 省级应急测绘保障服务体系研究[J]. 测绘通报,2012(7):94-96.
[5] 尹杰,万远,杨玉忠,等. 测绘地理信息在应急测绘中的应用[J]. 中国应急管理,2015(10):48-51.
[6] 王宪伦. 关于无人机应用安全问题的一点探讨[J]. 测绘与空间地理信息,2011(1):87-88.
[7] 康文峥,王海滨. 无人机通信技术的应用与发展[J]. 数字技术与应用,2015(2):42-43.
[8] 徐赞新,袁坚,王钺,等.一种支持移动自组网通信的多无人机中继网络[J]. 清华大学学报(自然科学版),2011(2):150-155.
[9] 符小卫,程思敏,高晓光. 无人机协同中继过程中的路径规划与通信优化[J]. 系统工程与电子技术,2014(5):890-894.
[10] 袁征,武毅. 微小型无人机应急通信系统设计[J]. 电子世界,2015(20):80-81.
Application Research of the Relay Communication Technology in UAV Emergency Surveying and Mapping
ZHOU Xingxia,CHENG Duoxiang,ZHAO Zhen,LIAO Xiaolu
2016-04-07
2016年国家基础测绘科技计划项目(2016KJ0301);四川省测绘地理信息局科技支撑项目(J2014ZC10)
周兴霞(1986—),女,硕士生,工程师,主要研究方向为应急测绘与防灾减灾、无人机系统集成与应用。E-mail:99268265@qq.com
周兴霞,程多祥,赵桢,等.中继通信技术在无人机应急测绘保障中的应用[J].测绘通报,2016(11):47-50.
10.13474/j.cnki.11-2246.2016.0363.
P23
B
0494-0911(2016)11-0047-04
猜你喜欢
计算机测量与控制(2021年8期)2021-08-23
无线电通信技术(2019年1期)2019-12-24
太原科技大学学报(2019年6期)2019-11-18
北京航空航天大学学报(2019年9期)2019-10-26
载人航天(2019年1期)2019-03-07
太空探索(2017年7期)2017-07-25
百科探秘·航空航天(2016年3期)2016-11-07
中国科技纵横(2016年14期)2016-10-10
航空模型(2016年5期)2016-07-25
太空探索(2016年12期)2016-07-18
