
三维激光扫描技术在隧道变形与断面检测中的应用研究
2017-04-07 03:40李宗平张永涛陈培帅
隧道建设(中英文) 2017年3期
李宗平, 张永涛, 2, 杨 钊, 2, 陈培帅, 2,*, 江 鸿, 2
(1. 中国交通建设集团有限公司, 北京 100088; 2. 中交第二航务工程局有限公司, 湖北 武汉 430040)
三维激光扫描技术在隧道变形与断面检测中的应用研究
李宗平1, 张永涛1, 2, 杨 钊1, 2, 陈培帅1, 2,*, 江 鸿1, 2
(1. 中国交通建设集团有限公司, 北京 100088; 2. 中交第二航务工程局有限公司, 湖北 武汉 430040)
传统的隧道变形监测手段主要是对部分点和断面的数据进行提取,存在工作量大、效率低、数据少等缺点。三维激光扫描技术可集成隧道安全与质量信息,一次扫描即可准确建立隧道三维矢量模型,精确得到隧道的整体变形和轮廓信息。以桐庐隧道为依托,研究三维激光扫描技术在山岭隧道变形监测中的应用,得到以下结论: 当激光扫描入射角大于60°时,扫描误差急剧增大,可根据入射角及隧道内径确定最大测站间距; 为降低隧道累计拼接误差导致的模型整体偏移,应采用首尾控制点双控技术; 采用单点面域分析法,可提升监测数据的可靠性; 采用点云及模型套接技术,可快速实现对隧道三维变形、支护侵限、二次衬砌厚度的评估,大大提升隧道数据采集与分析的效率。
矿山法隧道; 三维激光扫描技术; 变形监测; 点云; 首尾双控技术
0 引言
变形监测是隧道及地下工程险情预警的重要手段。传统监测方法以全站仪为代表,通过采集单点监测数据进行安全预警,存在测量工作量大、数据量少、效率低、成本高等缺点。三维激光技术可以获得目标体三维坐标点云信息,准确建立三维矢量模型,实现隧道三维变形监测、侵限分析、二次衬砌厚度评估等,近年来被广泛应用于隧道变形监测及质量检测中[1-6]。
国内外学者对三维激光技术在隧道工程中的应用做了大量研究。文献[7]提出采用移动式三维激光扫描仪获取铁路隧道的三维数据; 文献[8]给出了三维激光扫描参数的建议取值,以获取高质量的隧道点云;文献[9]采用二维建模方法提取隧道横断面点云的轮廓线进行变形分析; 文献[10]将隧道点云拟合成圆柱面,得到隧道的三维规则网格来测量隧道变形; 文献[11]采用三角化网格法分析隧道的三维点云,得到超欠挖值; 文献[12]提出采用三维激光技术拟合圆形隧道形状,确定横断面的相对变形; 文献[13]提出以原始三维激光扫描点云为输入源,基于邻域局部曲面拟合的方法截取隧道断面; 文献[14]将三维激光扫描的隧道点云数据分割成切片,利用多点坐标平差方法求取切片圆心和半径,比较拟合的圆环与设计轮廓确定隧道的收敛变形。已有研究多应用于地铁圆形断面隧道,而对多心圆形山岭隧道三维激光扫描技术应用的研究较少。本文依托桐庐隧道工程(跨度12.82 m,三心圆断面),开展三维激光扫描现场试验,对三维激光扫描技术应用在隧道变形监测、断面侵限及二次衬砌厚度检测等项目中的关键问题进行研究。
1 三维激光现场扫描技术
1.1 基于入射角误差分析的架站间距分析
三维激光入射角是影响隧道现场扫描数据精度的重要因素,入射角与精度成反比。在实际应用中,为减少扫描次数,一般会增加测站间距,这必然会增大激光入射角,降低精度。因此,确定合理的最大测站间距非常重要。
为分析入射角对精度的影响,在桐庐隧道进行入射角现场试验(见图1)。在隧道二次衬砌面上粘贴纸质标靶,每张标靶纸间距1 m,误差与入射角的关系见图2。可知: 当入射角大于60°时,误差急剧上升。

图1 现场试验相片

图2 误差与入射角的关系
Fig. 2 Relationship between monitoring errors and scanning incident angles
如图3所示,假设架站位于隧道中心轴线上,入射角最大的测点位于点B,可得
θmax= arctan (S/D)。
(1)
式中: θmax为测站扫描范围内的最大入射角,°; S为测站间距,m; D为隧道内径,m。

图3 测站间距、隧道内径与入射角关系图
Fig. 3Sketchdiagramofrelationshipamongdistanceofadjacentmonitoringstations,innerdiameteroftunnelandincidentangle
桐庐隧道轮廓最小内径D=12.82 m,代入式(1),可得桐庐隧道测站最大架设间距S=27.29 m。
1.2 隧道扫描点云整体偏差控制
三维激光扫描需用标靶点进行点云拼接,并基于控制点进行点云坐标系转换,已有研究表明: 当隧道长度较大时,三维激光技术用于山岭隧道的误差较大,监测得到的变形规律与实际情况有较大出入。桐庐隧道现场测试结果表明: 当采用常规监测手段,控制点仅布设在隧道一端时,点云拼接后隧道会发生整体偏移。分析桐庐隧道4站扫描数据(见图4和表1), 可知: 首端单侧控制点方案下尾部整体偏移较大,检测点B1偏移至B2,偏移量达14.6 cm,这是由标靶拼接误差累计引发的。采取首尾双控方法,即隧道扫描区段首尾均布设控制点,可解决隧道整体偏移问题。

图4 控制点不同布设方法下点云拼接对比
Fig. 4 Comparison of point cloud registration under different layouts of control points

表1 不同控制点布设方法下点云断面检测点坐标
在隧道扫描作业时,应对三维激光扫描仪进行整平,各测站的局部坐标系Z轴均垂直于水平面,坐标体系变换只需4个参数,即3个平移参数和1个旋转参数。
为减小转站产生的拼接误差,测站之间应至少布设2个拼接标靶,为了增加点云精度,拼接点标靶放置位置需相互交错,避免位于同一隧道断面上。转站过程见图5,具体如下: 1)测站位置。扫描仪架设在隧道中心线上,若测站无法架设在中心线,则距离中心线就近布置; 测站设置必须选择在稳定的地方,严禁在不稳定区域安置仪器; 测站间距按式(1)计算。2)扫描步骤。在扫描时首先架设扫描仪及①、②号标靶点,扫描①、②号标靶点,待标靶扫描结束后,进行隧道全景扫描,同时将①、②号标靶向前移动至③、④号标靶位置,全景扫描结束后扫描③、④号标靶点,待③、④号标靶扫描完毕后,保存扫描数据,新建测站并将扫描仪搬至下一站,如此重复,直至完成整个区段扫描。

图5 标靶布设方法
2 基于点云的隧道整体变形监测技术
2.1 隧道三维变形监测
传统的隧道变形监测是通过在隧道围岩或初期支护表面预埋测点,“以点代面”地分析隧道整体变形,但在隧道施工过程中,由于测点数量有限,易受到破坏,变形监测精度会受到较大影响[15-16]。三维激光扫描技术通过对隧道点云的提取和套接,比较相邻两次点云数据,无需埋设监测点即可得到隧道整体变形趋势。
以20 m隧道点云数据为例,进行坐标赋值和噪点去除。选取隧道首尾控制点ZN01、ZN02作为2期点云数据的共同控制点,即2期点云数据处于同一坐标体系,2点坐标见表2。在隧道监控中,以5 mm/d变形为预警阈值,超过阈值部分以红色显示,阈值以内以绿色显示。预警点分布和沉降值见图6,可知: 当日仅有0.042 6%的点变形超过预警阈值,主要分布在拱顶部位,超标点占比较小,且为散状分布,因而隧道安全状态较好。
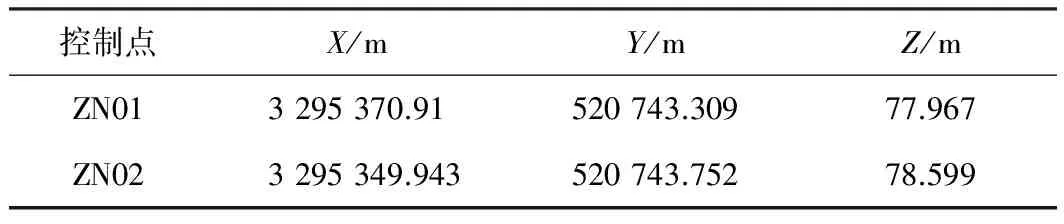
表2 隧道控制点坐标
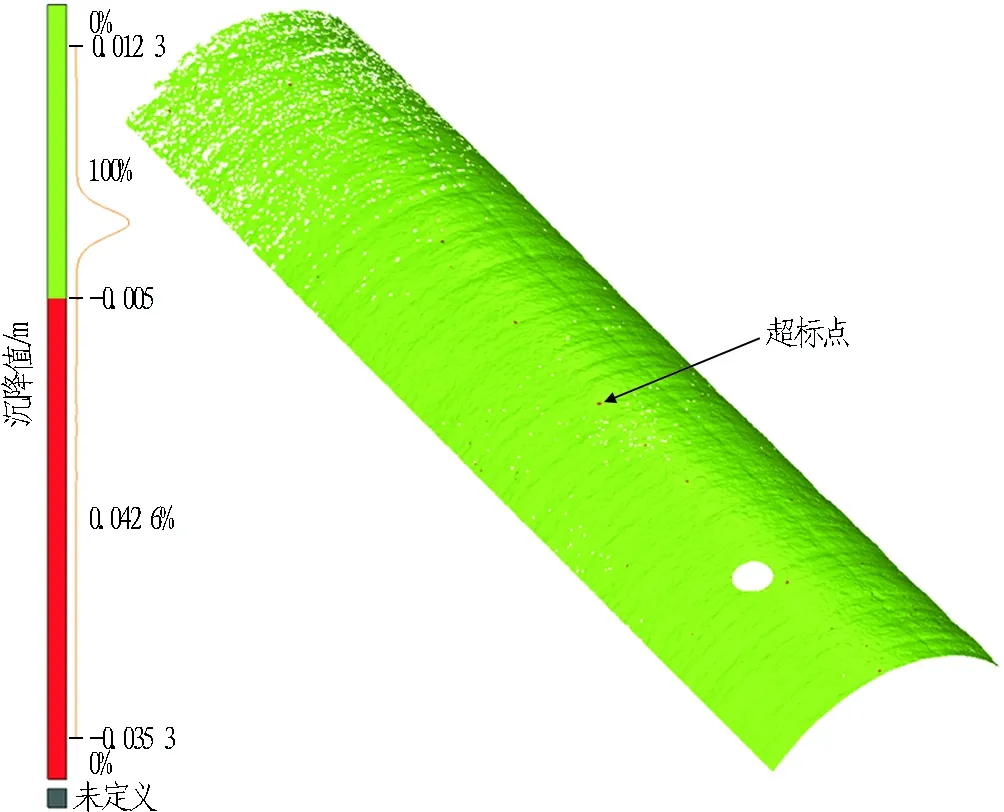
(a) 预警点分布

(b) 预警点沉降值
2.2 隧道单点面域分析
在隧道拱顶变形监测中,常规方法是选取少量固定的单点进行隧道拱顶沉降监测,受转站点误差及测点稳固性影响,所测单点沉降速率不稳定,且容易出现拱顶上抬趋势,与实际变形不符; 三维激光扫描技术可获得隧道三维点云数据,点间距可达1 mm左右,通过开发固定里程区间面域精准提取软件平台,采用正态分布的方法对面域点云数据设置置信区间,以该区间平均值作为该区域拱顶沉降值,由于面域数据多,较全站仪单点数据更具代表性,可提高测量精度。
在桐庐隧道进行了面域点云精度测试,为保证每日所取面域基本一致,在隧道围岩或初期支护上安置固定标靶,取圆形标靶范围内数据平均值作为当日拱顶沉降值。以距离掌子面10 m处断面DK100+660为例,监测数据见图7,可知: 三维激光扫描仪监测数据整体较为稳定,仅有1 d出现拱顶上抬,且上抬量较小。

(a) 沉降速率
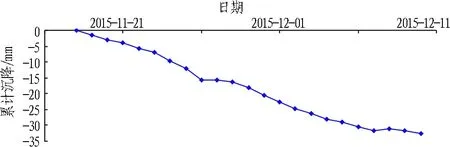
(b) 累计沉降
Fig. 7 Curves of deformation of tunnel crown top at cross-section DK100+660
3 基于点云的隧道断面检测技术
初期支护内轮廓和衬砌内轮廓决定了二次衬砌厚度,同时衬砌内轮廓设计断面是保证隧道运营期功能需求的重要控制标准,因而进行初期支护(超欠挖)和二次衬砌侵限分析以及二次衬砌厚度评估对隧道施工具有重要意义。
3.1 初期支护侵限三维扫描分析
常规初期支护侵限检测方法是选取固定断面进行断面轮廓分析,本文研究基于Revit软件,采用三维激光扫描技术,根据隧道中线和隧道设计横断面建立三维模型,采用3D Reshaper软件将三维模型与初期支护扫描点云进行嵌套,分析提取的隧道初期支护信息。
对桐庐隧道DK116+038~+140段初期支护进行分析(见图8),初期支护侵限阈值设置为0,侵限以红色显示,未侵限以绿色显示。结果表明: 该段未出现侵限区域,94.7%区域超挖值在0~30 cm,5.32%区域超挖值在30 cm以上,基本未出现欠挖区域。
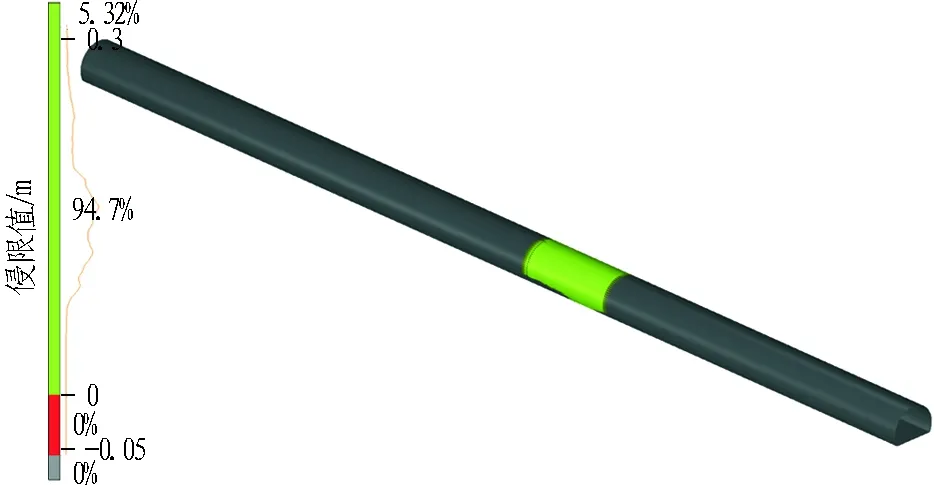
图8 DK116+038~+140段初期支护侵限信息
Fig. 8 3D diagram of primary support interference at cross-section DK116+038~+140
通过断面截取,可以得到初期支护最大超挖量、平均超挖量、最小欠挖量等数据(见图9和图10)。结果表明: 桐庐隧道DK116+038~+140段平均超挖量为13.79 cm; 最大超挖量位于DK116+072处,为31.75 cm; 最小超挖量位于DK116+136处,为13.74 cm。
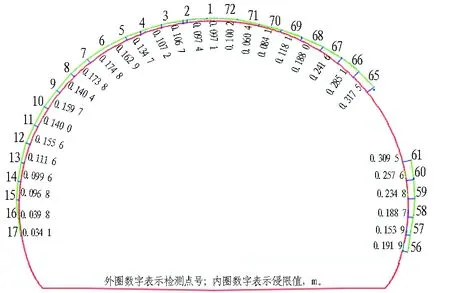
图9 DK116+072断面初期支护侵限分析
Fig. 9 Analysis of primary support interference at cross-section DK116+072

图10 DK116+038~+140段初期支护超欠挖曲线
Fig. 10 Curves of overbreak and underbreak of tunnel at cross-section DK116+038~+140
3.2 二次衬砌侵限三维激光扫描分析
二次衬砌扫描与初期支护扫描操作相同,分析原理相似,建立隧道二次衬砌三维模型,将模型与二次衬砌扫描点云进行嵌套分析。图11为桐庐隧道DK99+850~DK100+120区间二次衬砌侵限分析云图,二次衬砌侵限阈值设置为0,未侵限以绿色显示,侵限以红色显示,该段二次衬砌未出现侵限。同样可提取任意里程处二次衬砌断面信息,里程DK100+104断面二次衬砌提取数据见图12,可知最大外扩量为14.36 cm、最小外扩量为6.67 cm。

图11 隧道DK99+850~ DK100+120段二次衬砌侵限信息
Fig. 11 3D diagram of secondary lining interference at cross-section DK99+850~ DK100+120

图12 DK100+104断面二次衬砌断面侵限分析
Fig. 12 Analysis of secondary lining interference at cross-section DK100+104
3.3 隧道二次衬砌厚度评估
隧道二次衬砌厚度是隧道施工质量检测的重要指标,直接关系到隧道的使用安全和寿命。在隧道施工中对初期支护及二次衬砌进行侵限检测,初期支护出现侵限则二次衬砌厚度会不足,初期支护和二次衬砌均未侵限不是二次衬砌厚度满足要求的充分条件。因此,有必要对二次衬砌厚度进行检测。
隧道二次衬砌厚度检测通常采用地质雷达和取芯分析等方法,但工作效率较低,且当天线与二次衬砌未密贴时,检测结果将产生较大误差。三维激光扫描技术将二次衬砌扫描点云与初期支护扫描点云在同一坐标系下进行嵌套,以三维色谱图展现二次衬砌厚度信息,并可以获取任意位置的二次衬砌厚度检测结果。图13为桐庐隧道DK100+606~+668区间二次衬砌厚度检测结果,该隧道二次衬砌厚度阈值为50 cm,二次衬砌厚度合格区域以绿色表示,不合格区域以红色表示。由检测结果可知,该区间二次衬砌厚度达到了要求,主要在60~75 cm。
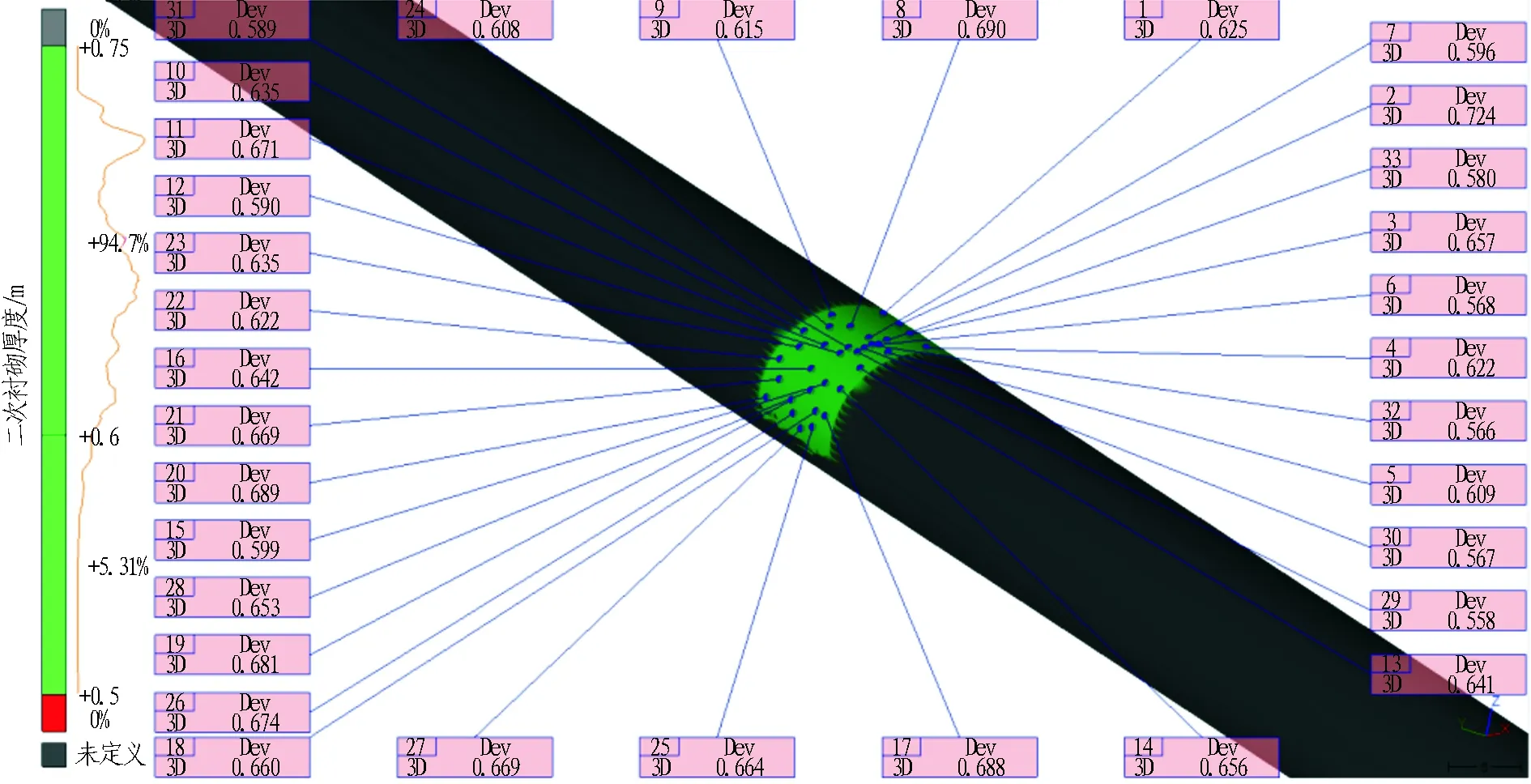
图13 隧道DK100+606~+668段二次衬砌厚度
4 结论与讨论
1)隧道为独特的线性结构,三维激光入射角度对扫描精度影响较大,为降低扫描误差,建议扫描入射角小于60°,可根据入射角及隧道内径确定最大测站间距。同时应采用首尾控制点双控技术,降低隧道整体偏移。
2)采用三维激光点云套接技术,可获得隧道整体变形三维色谱图、任意位置的二维断面图、任意点的侵限值以及二次衬砌厚度等。采用面域点云优化分析技术,可获得较为精确的隧道单点变形信息,对隧道安全控制具有较大的指导意义。
3)目前三维激光扫描技术应用在实际工程中的主要障碍是点云的数据处理,在这方面有待继续研究。今后可通过算法优化,提升点云处理的效率和精度,实现多站数据高精度拼接和点云快速去噪,从而更好地将该技术应用到山岭隧道的建设中。
[1] 侯海民.三维激光扫描仪在青岛胶州湾海底隧道的应用[J].隧道建设, 2010, 30(6): 693-696.(HOU Haimin.Application of 3-D laser scanner in Jiaozhou Bay subsea tunnel in Qingdao[J].Tunnel Construction, 2010, 30(6): 693-696.(in Chinese))
[2] 简骁,童鹏.基于地面激光雷达技术的隧道变形监测方法研究[J].铁道勘察, 2011, 37(6): 19-22.(JIAN Xiao,TONG Peng. Tunnel deformation monitoring by surface laser radar technology[J]. Railway Investigation and Surveying, 2011, 37(6): 19-22.( in Chinese))
[3] 史玉峰,张俊,张迎亚.基于地面三维激光扫描技术的隧道安全监测[J].东南大学学报(自然科学版), 2013, 43(增刊2): 246-249.( SHI Yufeng, ZHANG Jun, ZHANG Yingya. Tunnel safety monitoring based on terrestrial laser scanning technology[J]. Journal of Southeast University (Natural Science Edition),2013,43(S2): 246-249. (in Chinese))
[4] 朱宁宁.三维激光扫描在地铁隧道形变监测中的应用[J].测绘工程, 2015, 24(5): 63-68.(ZHU Ningning. Application of 3D laser scanning to the subway tunnel deformation monitoring[J]. Engineering of Surveying and Mapping, 2015, 24(5): 63-68.(in Chinese))
[5] 桂芳茹.三维激光扫描在地铁盾构隧道变形监测的应用[J].科技通报,2015, 31(12): 263-265.(GUI Fangru. Application of 3D laser scanning technology in subway shield tunnel deformation monitoring[J]. Bulletin of Science and Technology, 2015, 31(12): 263-265.(in Chinese))
[6] 托雷.基于三维激光扫描数据的地铁隧道变形监测[D].北京: 中国地质大学(北京),2012. (TUO Lei. Subway tunnel deformation monitoring based on 3D laser scanning data[D]. Beijing: China University of Geosciences(Beijing), 2012.(in Chinese))
[7] Yoon Jong-Suk,Sagong Myung,Lee J S,et al. Feature extraction of a concrete tunnel liner from 3D laser scanning data[J]. NDT & E International, 2009, 42(2): 97-105.
[8] Delaloye D. Development of a new methodology for measuring deformation in tunnels and shafts with terrestrial laser scanning (LIDAR) using elliptical fitting algorithms[D]. Kingston: Queen’s University, 2012.
[9] Han Jen-Yu Y,Guo Jenny,JIANG Yi-Syuan. Monitoring tunnel profile by means of multi-epoch dispersed 3D LIDAR point clouds[J]. Tunnelling and Underground Space Technology, 2013, 33(1): 186-192.
[10] Gosliga R V, Lindenbergh R, Pfeifer N. Deformation analysis of a bored tunnel by means of terrestrial laser scanning[C]//Proceedings of the ISPRS Com-Mission V Symposium Image Engineering and Vision Metrology. Dresden:[s.n.], 2006: 167-172.
[11] Fekete S,Diederichs M,Lato M. Geotechnical and operational applications for three-dimensional laser scanning in drill and blast tunnels[J].Tunnelling and Underground Space Technology, 2010, 25(5): 614-628.
[12] Stiros S,Kontogianni V. Mean deformation tensor and mean deformation ellipse of an excavated tunnel section[J].International Journal of Rock Mechanics & Mining Sciences, 2009, 46(8): 1306-1314.
[13] 托雷,康志忠,谢远成,等.利用三维点云数据的地铁隧道断面连续截取方法研究[J].武汉大学学报(信息科学版),2013,38(2): 171- 175.(TUO Lei,KANG Zhihong,XIE Yuancheng,et al.Continuously vertical section abstraction for deformation monitoring of subway tunnel based on terrestrial point clouds[J].Geomatics and Information Science of Wuhan University,2013,38(2): 171-175.(in Chinese))
[14] 王令文,程效军,万程辉.基于三维激光扫描技术的隧道检测技术研究[J].工程勘察,2013(7): 53-57. (WANG Lingwen,CHENG Xiaojun,WAN Chenghui.Study of the 3D laser scaning technolgy for tunnel inspection[J].Geotechnical Investigation & Surveying,2013(7): 53-57. (in Chinese))
[15] Seo D J, Lee J C, Lee Y D, et al. Development of cross section management system in tunnel using terrestrial laser scanning technique[C]// The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Beijing: [s.n.], 2008: 573-582.
[16] 宋妍,王晓琳,李洋,等.三维激光扫描技术与数码影像地质编录系统隧道围岩信息采集应用对比研究[J].隧道建设, 2013, 33(3): 197-202.(SONG Yan,WANG Xiaolin,LI Yang,et al.Contrast research on application of 3-dimensional laser scanning technology and digital imaging geology catalog system in acquisition of rock mass information of tunnels[J].Tunnel Construction, 2013, 33(3): 197-202.(in Chinese))
Application of 3D Laser Scanning Technology to Tunnel Deformation Monitoring and Cross-section Detection
LI Zongping1, ZHANG Yongtao1, 2, YANG Zhao1, 2, CHEN Peishuai1, 2,*, JIANG Hong1, 2
(1.ChinaCommunicationsConstructionCo.,Ltd.,Beijing100088,China;2.CCCCSecondHarborEngineeringCo.,Ltd.,Wuhan430040,Hubei,China)
The traditional tunnel monitoring methods have disadvantages such as large workload, low efficiency and little quantity of data collected. The tunnel safety and quality information can be integrated, accurate 3D vector model of tunnel can be established and the integral deformation and contour of the tunnel can be obtained by using 3D laser scanning technology. The application of 3D laser scanning technology to deformation control of Tonglu Tunnel is studied. Some conclusions are drawn as follows: 1) The scanning error increases sharply when the incident angle is larger than 60°. The maximum distance of adjacent monitoring stations depends on scanning incident angle and tunnel diameter. 2) The dual points control technology should be adopted so as to reduce the overall deviation induced by cumulative tunnel registration errors. 3) The accuracy of monitoring data can be improved by using single point domain analysis method. 4) The tunnel deformation, support structure interference and thickness of secondary lining can be detected quickly and the data collection and analysis efficiency of tunnel can be improved greatly by using point cloud and model socket technology.
tunnel constructed by mining method; 3D laser scanning technology; deformation monitoring; point cloud; dual points control technology
2016-04-27;
2017-01-03
李宗平(1971—),男,安徽金寨人,1995年毕业于西安公路交通大学,土木工程专业,本科,教授级高级工程师,现主要从事隧道与地下工程方面的研究工作。E-mail: 2426811522@qq.com。*通讯作者: 陈培帅, E-mail: ps.chen@qq.com。
10.3973/j.issn.1672-741X.2017.03.012
U 452
A
1672-741X(2017)03-0336-06
猜你喜欢
地理空间信息(2022年11期)2022-11-26
中学数学研究(广东)(2019年12期)2019-07-18
测绘学报(2018年10期)2018-10-26
弹箭与制导学报(2018年3期)2018-08-28
测绘工程(2018年3期)2018-03-20
城市勘测(2018年1期)2018-03-15
石油地球物理勘探(2017年2期)2017-11-23
测绘学报(2015年4期)2015-01-14
大地测量与地球动力学(2014年3期)2014-02-13
河南城建学院学报(2014年2期)2014-02-09
