
具有时变时滞和无时滞耦合复杂动态网络的同步保性能控制
2017-04-14 01:06胡俊强罗毅平
湖南工程学院学报(自然科学版) 2017年1期
胡俊强,罗毅平
(湖南工程学院 风力发电机组及控制湖南省重点实验室,湘潭 411104)
具有时变时滞和无时滞耦合复杂动态网络的同步保性能控制
胡俊强,罗毅平
(湖南工程学院 风力发电机组及控制湖南省重点实验室,湘潭 411104)
为了提高模型的适应性以及真实地仿真现实的网络世界,研究一类具有时变时滞和非时滞的复杂网络,同时考虑到该系统的控制成本,还需要研究此类复杂网络系统的保性能控制.为此系统设计动态反馈控制器,构造保性能函数.利用李雅普洛夫稳定性理论以及矩阵不等式处理等数学方法,得出具有时变时滞和非时滞复杂网络的同步保性能控制器的充分条件.所设计的动态反馈控制器在保证系统的渐进稳定条件下让系统的性能指标满足特定条件.最后给出数值仿真证明其可行性和有效性.
复杂网络;同步;反馈控制;保性能;时变时滞
自然界和人类社会的许多系统都能描述成复杂系统,因此复杂网络的研究广泛存在于科学、社会和工程等领域,国内外学者已然掀起探索复杂网络的热潮[1].
复杂网络的同步控制则是其中一个重要的研究热点.很多控制方法如: 自适应控制[2]、牵制控制[3]、脉冲控制[4]、间歇控制[5]等均被应用到复杂网络同步控制中.此外,时滞是复杂网络普遍存在的一种客观现象,它能使系统运行不稳定导致性能变差[6].因此,时滞复杂网络的同步得到各领域学者的关注[7].在时滞存在的前提下,我们希望系统达到同步,同时也希望系统的控制成本达到特定的要求.所以,保性能控制也成为一个热门课题,也已有一定成果[8-9].
本文研究具有时变时滞和非时滞复杂网络的同步保性能控制,设计出一种自适应反馈控制器,得到了控制器存在的充分条件以及设计方法,这些设计方法与时滞有关.同时构造了Lyapunov函数,运用Lyapunuv稳定性理论并结合矩阵不等式处理方法,得出具有时变时滞和非时滞的保性能控制存在的充分条件.所设计控制器不仅保证了系统的稳定性,也使系统满足特定保性能指标,最后给出数值仿真以验证其有效性.
1 问题描述及预备条件
考虑一个含有N个节点的复杂动态网络,具时滞和非时滞耦合,模型如下:


(1)

为了证明的需要,引入以下引理和假设:






(2)

(3)
定义误差变量,使系统达到同步.
(4)
用式(1)减去式(2),可得到误差系统
(5)



(6)
由引理1,存在一个矩阵,使得GTΦk=λkΦk(k=1,2,…,N),其中是矩阵的特征值.使用一个非奇异变换:
∈Rn×N
则有:
(7)

2 控制器设计与稳定分析
对于系统(1),设计一个误差反馈控制器:
(8)
其中U(t)=(u1(t),u2(t)…uN(t))∈Rn×N将作为控制输入ui(t),K∈Rn×n是控制增益.
同时,设定如下二次保性能控制函数来保证复杂网络的性能,
(9)
其中,D为给定正定对称矩阵.
定理1:给定矩阵C,D,若存在不变时滞τ(t)∈[0,],使得如下矩阵不等式成立:
(10)
其中H=l1I+c1λi1A1+Q+K+C+KTDK
则复杂动态网络系统式(1)的保性能控制律为动态控制律式(7),且保性能控制函数的上界为.
(11)
证明:
对系统式(9)构造Lyapunov函数:
(12)
有:
(13)
(14)



(15)
由定理1可知:
同时可得:
(16)
将式(16)对时间t∈[0,)积分,有:
=J*
(17)
证毕成立.

<0
(18)
如果存在对称正定矩阵Q以及矩阵K,使得式(19)所示线性矩阵不等式(LMI)成立,则时滞复杂网络式(1)满足性能指标式(10),且保性能稳定,保性能函数满足:
(19)
经过仿真,证明能得到对称正定矩阵Q以及矩阵K.
3 数值仿真


下面给出添加了反馈控制器后三个节点的状态图,如图1所示.
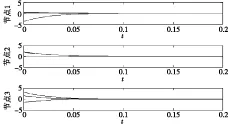
图1 状态曲线图
由上图得知,经过一段时间后,系统状态渐进达到一个稳定的值.
4 结语
对具有时变时滞和非时滞的复杂网络,本文提出了一种基于LMI的保性能线性反馈控制技术,利用泛函数方程等数学分析方法.获得满足保性能指标的充分条件,所设计的反馈控制器能通过求解矩阵不等式而得到,在保证系统稳定的同时也保证了性能指标满足一定上界.最后,数值仿真表明结果的正确性及控制方法的有效性.
[1] 王 娟. 复杂网络及其研究现状概述[J]. 现代计算机(专业版),2013(34):16-18.
[2] 郭晓永. 复杂动态网络的自适应同步控制研究[D].西安电子科技大学博士学位论文,2013.
[3] Hai-Yi Sun, Ning Li, De-Ping Zhao, Qing-Ling Zhang. Synchronization of Complex Networks with Coupling Delays via Adaptive Pinning Intermittent Control [J]. International Journal of Automation and Computing, 2013(4):312-318.
[4] 李 美,陈其工,魏利胜. 一类复杂动态网络的脉冲同步研究[J]. 重庆科技学院学报(自然科学版),2016(1):121-124.
[5] XIE L. Output feedback H∞Control of Systems with Parameter Uncertainty [J].International Journal of Control,1999,63(4):741-750.
[6] LUO Y, ZHOU B.Guaranteed Cost Synchronization of Complex Network Systems with Delay[J].Asian Journal of Control,2015,17(4) : 1-11.
[7] 韩 敏,张雅美,张 檬. 具有双重时滞的时变耦合复杂网络的牵制外同步研究[J]. 物理学报,2015(7):151-159.
[8] LEE T H,PARK J H,JI D H, Et Al. Guaranteed Cost Synchronization of A Complex Dynamical Network via Dynamic Feedback Control[J].Applied Mathematics and Computation,2012,218 (11):6469-6481.
Synchronous Guaranteed Cost Control for Coupled Complex Dynamical Networks with Time Varying Delays and Time Varying Delays
HU Jun-qiang, LUO Yi-ping
(Key Laboratory of Wind Turbine and Control Hunan Province, Hunan Institute of Engineering, Xiangtan 411101, China)
In order to improve the adaptability of the model and simulate the real world, a complex network with time-varying delay and non-time-delay is studied. In order to control the cost of the system, it is necessary to study the guaranteed performance control of such complex network systems. A dynamic feedback controller is designed for this system, and the guaranteed performance function is constructed. Based on the Lyapunov stability theory and matrix inequality treatment, a sufficient condition for the synchronization guaranteed cost controller with time-varying delay and non-delay complex network is obtained. The dynamic feedback controller is designed to meet the specific conditions under the condition of asymptotic stability of the system. Finally, numerical simulation is given to prove its feasibility and effectiveness.
complex network; synchronization; feedback control: guaranteed cost; time varying delay
2016-09-08
国家自科基金资助项目(11372107);湖南省教育厅创新平台项目(15K031).
胡俊强(1990-),男,硕士研究生,研究方向:复杂网络控制.
罗毅平(1966-),男,博士,教授,研究方向:动力学分析与控制.
TP273.3
A
1671-119X(2017)01-0017-04
猜你喜欢
石油沥青(2021年1期)2021-04-13
数学物理学报(2020年5期)2020-11-26
空间科学学报(2020年4期)2020-04-22
自动化学报(2019年12期)2020-01-19
自动化学报(2019年6期)2019-07-23
北方工业大学学报(2019年5期)2019-03-30
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
考试周刊(2017年7期)2017-02-06
制冷技术(2016年4期)2016-08-21
