
混合动力汽车E-H模式切换中扭矩协调控制策略研究
2017-04-20 01:08孔慧芳
合肥工业大学学报(自然科学版) 2017年3期
孔慧芳, 王 瑞, 鲍 伟
(合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
混合动力汽车E-H模式切换中扭矩协调控制策略研究
孔慧芳, 王 瑞, 鲍 伟
(合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
在混合动力汽车进行E(electric drive mode,纯电动模式)-H(hybrid drive mode,混合驱动模式)切换时,针对2个动力源响应特性差异、离合器接合等原因造成动力传递不平稳及整车冲击的问题,文章制定了扭矩协调控制策略。整个扭矩协调控制策略按发动机的起动、调速和动力接入等3个不同阶段制定,采用Matlab/Simulink搭建混合动力汽车模式切换控制策略模型和整车模型,对该策略的有效性进行验证。仿真结果表明,该策略能够减小扭矩波动和整车冲击度,有效提高模式切换过程的平顺性。
混合动力汽车;扭矩协调控制;模式切换;冲击度
0 引 言
随着节能和环保的要求进一步加大,兼顾了电动汽车和传统汽车优点的混合动力汽车备受关注。混合动力汽车含有发动机和电机2种动力装置,两者的组合可形成多种工作模式。在不同工作模式之间切换时,由于发动机和电机在动态特性上的差异,离合器的接合或分离将会导致动力传递的不平稳,影响整车动力性能[1-3]。
针对这些问题,文献[4-5]采用在线实时发动机瞬时转速来估计发动机输出扭矩,提出了“发动机扭矩开环+发动机动态扭矩估计+电机扭矩补偿”的控制策略;文献[6]提出了基于电机转速闭环控制的混合动力汽车模式切换动态协调控制策略,以电机转速作为反馈控制量在一定程度上解决了发动机扭矩不能实时精确估计的问题;文献[7]将不同的工作模式对应混杂系统的不同子域,采用混杂系统切换控制理论来研究减小模式切换过程冲击的方法;文献[8-9]通过分析系统在不同驱动模式切换过程中发动机、电机以及离合器等参数变化,制定针对不同模式切换过程的扭矩协调控制策略。
本文以单轴并联式混合动力汽车为研究对象,针对纯电动模式(electric drive mode,E)到混合驱动模式(hybrid drive mode,H)的切换过程,制定此过程中的扭矩协调控制策略,解决切换过程中的整车冲击问题。
1 结构介绍和驱动模式分析
单轴并联式混合动力汽车主要由发动机、分离离合器、启动/发电一体化(integrated starter and generator,ISG)电机、电源转换设备、电池组、双离合自动变速器(dual clutch transmission,DCT)以及动力传动系统组成,结构如图1所示。

图1 单轴并联式混合动力汽车结构
发动机与ISG电机之间通过分离离合器相连。分离离合器为湿式多片离合器,可通过控制其油压来控制传递扭矩。ISG电机兼具发电机和电动机的双重作用,同时在发动机起动时还要作为起动机使用。系统动力通过DCT变速箱和差速器最终传递到车轮。
为简化分析过程,将图1简化为如图2所示的动力学模型。其中,JE、JM、JT、Jd、JCE和JCM分别为发动机、电机、DCT、差速器、离合器主动片以及从动片的转动惯量;Jω+mr2为车轮及车身等效转动惯量;iDCT、id分别为DCT和差速器的速比。

图2 动力学简化模型
该混合动力系统结构为重度混合动力结构,通过控制动力装置和离合器的工作状态可实现多种工作模式。当车辆起步或低速行驶时,需求驱动功率较小,车辆运行在纯电动模式;当需求驱动功率增大或电池电量不足时,则需要切换至发动机驱动模式;当整车加速或爬坡时,整车需求扭矩大于发动机高效区最大扭矩时,车辆进入混合驱动模式;当车辆电池SOC值较低,整车需求扭矩小于发动机高效区下限值时,车辆进入行车充电模式。主要部件各驱动模式下的工作状态见表1所列。
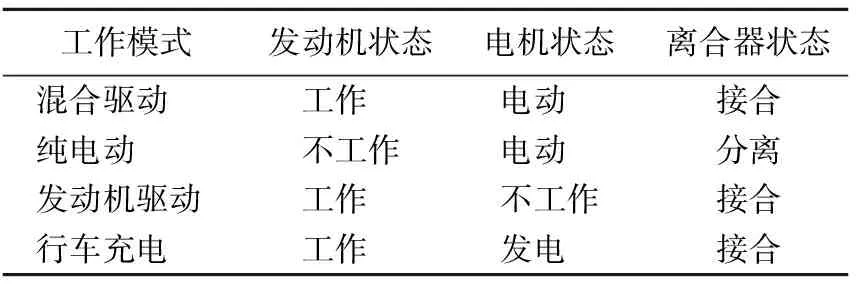
表1 混合动力系统驱动模式
由纯电动模式到混合驱动模式的切换涉及发动机的起动及调速过程、离合器的多次接合过程等多种中间状态,与其他驱动模式切换相比较为复杂,如果不进行协调控制,将产生纵向冲击,严重影响整车的平顺性,因此下文对该过程进行协调策略的制定。
2 扭矩协调控制策略
混合动力系统由纯电动模式切换至混合驱动模式时,主要可分为3个过程,即发动机起动过程、调速过程以及动力接入过程,扭矩协调控制策略按照这3个过程的不同特点分别制定,流程如图3所示。

图3 模式切换流程图
发动机起动过程、调速过程以及动力接入过程的时序如图4所示。

图4 纯电动至混合驱动切换过程示意图
0~t1阶段,纯电动模式;t1时刻发出模式切换信号;t1~t2阶段,离合器预充油,迅速达到Kisspoint点,预备起动发动机;t2~t3阶段,发动机起动,电机扭矩协调;t3~t5阶段,发动机调速,电机扭矩协调;t5~t7阶段,发动机动力接入,电机扭矩协调。
2.1 发动机起动阶段扭矩协调控制策略
t2~t3阶段,离合器油压已经达到Kisspoint点,电机通过离合器传递扭矩带动发动机起动。为保证整车的动力性,应进行电机扭矩协调控制,此时电机的扭矩分为2个部分,一部分提供整车动力,另一部分提供发动机起动所需的扭矩。此阶段动力学方程为:
(1)
(2)
其中,TM为电机输出扭矩;Ttf为等效到变速器输入端的阻力矩;TStart为起动发动机所需的电机补偿扭矩;Jh为离合器后端等效转动惯量;ωM为电机转动角速度。
通过控制分离离合器执行机构的油压来控制传递扭矩的大小,使其扭矩跟随电机补偿扭矩,具体如下:
(3)
其中,TC为离合器传递扭矩。CO离合器期望油压的表达式为:
(4)
其中,Pn为离合器的活塞单位面积上的作用压力;Δωcr为离合器主动盘和从动盘的转速差;sign(Δωcr)为符号函数;μd为离合器摩擦片的动摩擦系数;S为离合器活塞作用面积;Z为离合器的摩擦副数;R0为离合器的摩擦片外径;R1为离合器的摩擦片外径。
此阶段发动机未点火,发动机转速ωE与离合器传递扭矩TC关系为:
(5)
(6)
其中,Jq为离合器前端等效转动惯量;TEf为发动机阻力矩,与发动机转速成一定的函数关系,可通过查表得到。
通过上述动力学分析可得:设定发动机的期望角速度ωE,取发动机期望转速和当前转速的差值作为误差,采用常规PID控制调节(kP、kI和kD分别取值为12.5、49.5和0),使得发动机转速按照期望转速由0加速到800 r/min的点火点转速。
2.2 发动机调速阶段扭矩协调控制策略
当达到点火转速时,发动机收到点火命令起动发动机,进入电子控制单元(electronic control unint,ECU)控制的自调速阶段。因为突然喷油点火造成的发动机转矩波动会通过分离离合器传递给电机及传动系统,造成动力系统冲击,所以影响车辆的行驶,给驾驶员带来不适感[10]。同时,因为发动机转矩变化的时间常数明显大于电动机转矩变化的时间常数,所以影响当发动机起动后,进入下一阶段会增大电机的扭矩协调范围,直至模式切换的总体扭矩波动达到一定的指定范围内。将起动时刻的电机转速作为发动机怠速控制目标转速发送给发动机控制器,保证发动机在喷油点火后的怠速控制目标转速与当前传动系统转速相同。
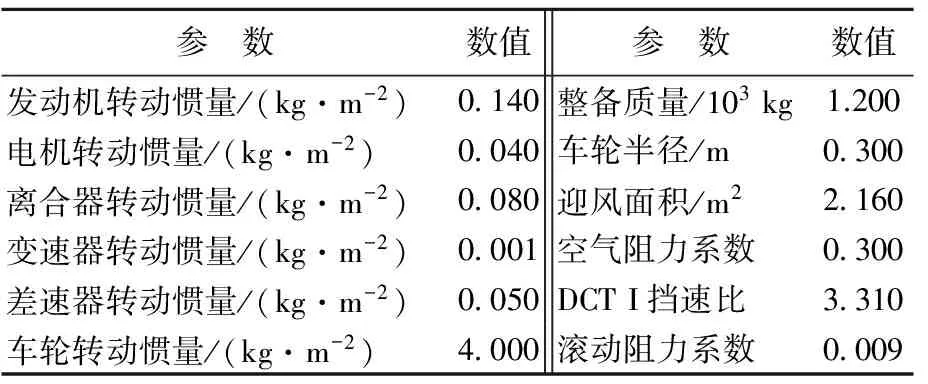
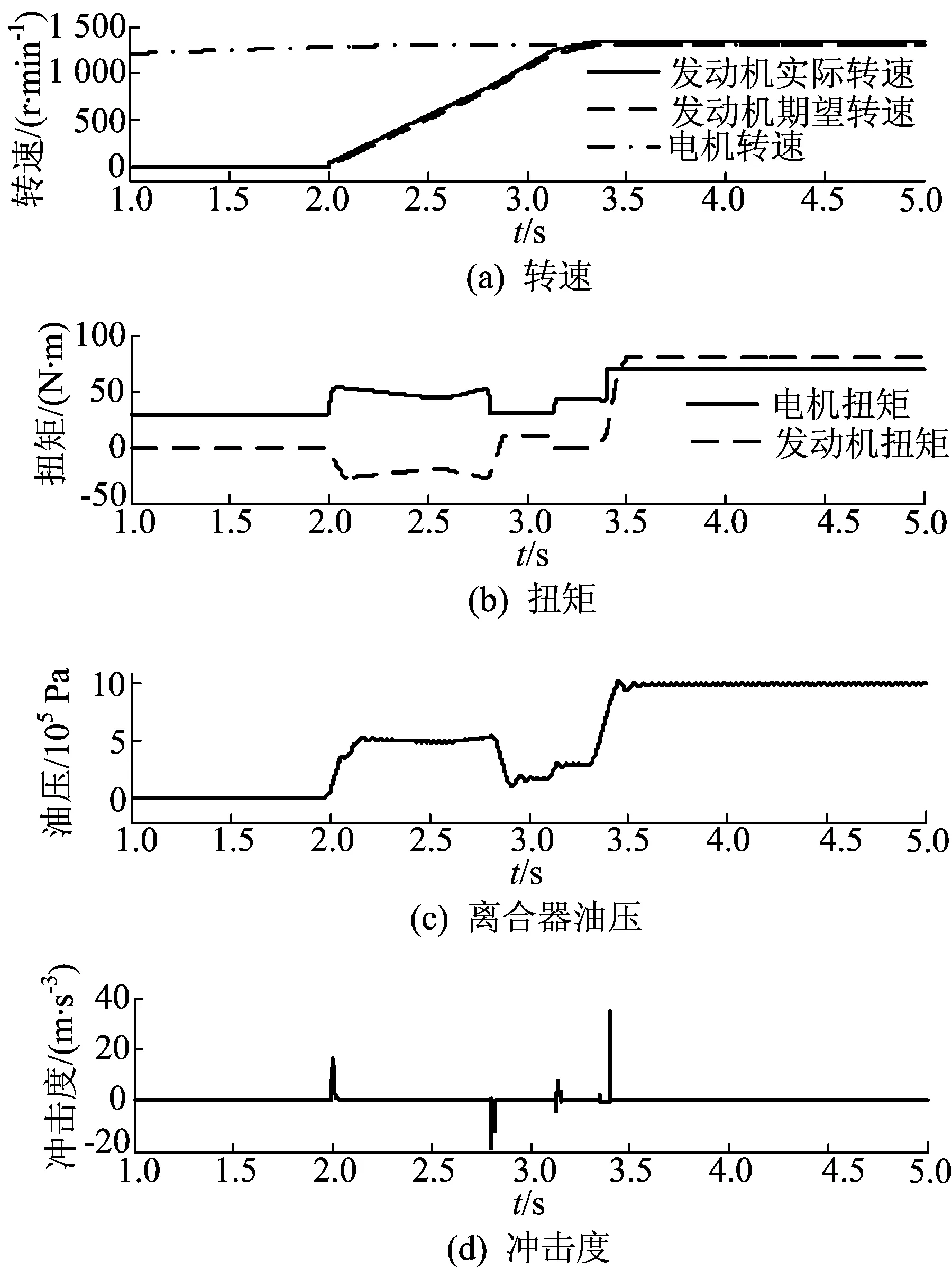
t3~t4阶段,发动机刚起动时,与电机转速相差较大,为了减小分离离合器主、从动盘接合带来的冲击,应控制离合器油压迅速分离退油至Kisspoint点,发动机独立起动,使发动机转速迅速接近电机转速,为下一阶段做准备。此阶段仍由电机提供驱动扭矩。当离合器主、从动盘转速差达到指定范围内,即|Δωcr| t4~t6阶段,离合器进行快速接合,为减小离合器接合所带来的冲击度,应调节发动机输出扭矩为0,此时发动机实际扭矩克服自身转动阻力矩,发动机转速由电机带动上升直至与电机转速同步,即 (7) 其中,TE为发动机扭矩。 此阶段的动力学方程为: (8) (9) (10) 发动机转速达到电机转速后,离合器迅速充油至完全接合,此阶段完成。 2.3 发动机动力接入阶段扭矩协调控制策略 t6~t7阶段是最终完成纯电动模式向混合驱动模式切换的阶段,其动力学方程为: (11) 因为无法准确实时预测发动机输出扭矩,所以通过控制发动机扭矩变化的斜率来达到此阶段减小整车冲击度的效果。 控制发动机扭矩以特定斜率逐渐上升,电机扭矩斜率对应发动机斜率逐渐协调变化,考虑通过控制发动机、电机的负荷信号的变化率来控制其扭矩变化率以改善模式切换过程扭矩波动,即 (12) 切换过程中,需求驱动扭矩为: TE+∫kEdt+TM+∫kMdt= (13) 同时 (14) 因此可得: (15) 其中,TM-exp、TE-exp、TDrv-exp分别为电机、发动机以及驾驶员期望扭矩;kM、kE、kDrv分别为发动机、电机以及驾驶员需求驱动扭矩的变化率。 发动机不能直接响应转矩命令,其控制较为复杂,当发动机ECU接收到目标转矩后,对目标转矩解析,将目标转矩信号转化为节气门开度信号,通过发动机节气门开度的变化调节发动机转矩变化率。 当电机和发动机的扭矩各自达到预定需求扭矩后,模式切换就此完成。 (16) 其中,ig为变速器速比;i0为主减速器传动比;δ为汽车旋转质量换算系数;m为汽车质量;r为车轮半径;Ts为总输出扭矩。 各国冲击度量化指标各不相同,德国推荐值为|J|≤10 m/s3,我国推荐值[12]为|J|≤17.64 m/s3。 在Matlab/Simulink环境下,建立模式切换控制策略模型逻辑图如图5所示,将图5模型嵌入到搭建好的整车模型中,构成的整车模型逻辑图如图6所示。 图5 模式切换控制策略模型逻辑图 图6 混合动力汽车整车模型逻辑图 车辆部分主要参数见表2所列。 表2 整车主要参数 现进行由纯电动模式(电机提供扭矩30 N·m到混合驱动模式(发动机提供扭矩80 N·m、电机提供扭矩70 N·m)的切换仿真过程。2.0 s之前车辆运行在纯电动模式;在第2.0 s 时切换开始,按照期望的发动机转速变化调节,在2.8 s时使得发动机从静止加速到点火转速800 r/min,完成第1阶段发动机起动过程;3.1 s时发动机转速自调节到1 200 r/min,3.1~3.4 s由离合器滑摩将发动机转速带到同步转速1 300 r/min,离合器锁止,完成第2阶段发动机调速过程;3.4 s之后发动机和电机的扭矩重新分配,到3.7 s扭矩分配结束,完成第3阶段发动机动力接入阶段。至此完成了整个模式切换过程。 无扭矩协调控制和有扭矩协调控制的仿真结果分别如图7、图8所示,电机的响应时间与发动机相比相当短,因此在无扭矩协调时可等效为瞬变输出[4]。在该切换过程中,图7a和图8a为转速跟踪控制效果,整个过程控制效果较好,实际转速符合期望;通过分析对比图7b和图8b可知,无扭矩协调控制时,电机和发动机扭矩波动较大,而有扭矩协调时,电机和发动机扭矩波动较小;通过对比图7c和图8c可知,有扭矩协调与无扭矩协调离合器油压相比,油压的变化较为平缓,利于离合器的控制;对比图7d和图8d可知,无扭矩协调时冲击度较大,最大值达到34.8 m/s3,对车辆产生了较大的冲击,影响了整车平顺性,而有扭矩协调时,冲击度得到了明显的改善,最大值仅为8.09 m/s3,完全符合我国的冲击度指标要求,有效改善了整车的平顺性。 图7 无扭矩协调控制的仿真结果 图8 扭矩协调控制的仿真结果 (1) 本文针对并联混合动力系统驱动模式切换过程,设计了扭矩协调控制策略,采用电动机扭矩响应迅速的优点,较好地弥补了发动机扭矩响应滞后的缺点,以减小混合动力汽车模式切换过程中的冲击,从而较好地保证并联混合动力系统对扭矩传递稳定性和整车平顺性的要求。 (2) 对本文策略进行仿真验证分析,仿真结果表明,本文所设计的策略能有效减小扭矩波动和整车冲击度,提高了模式切换过程中的车辆平顺性。 [1] 赵韩,徐承付,尹安东,等.ISG型中度HEV控制策略优化算法研究[J].合肥工业大学学报(自然科学版),2013,36(9):1025-1028. [2] 倪成群,张幽彤,赵强,等.混合动力离合器接合过程的动态扭矩控制策略[J].机械工程学报,2013,49(4):114-121. [3] PARK J.Development of engine clutch control for parallel hybrid vehicles[C]//Electric Vehicle Symposium and Exhibition.[S.l.]:IEEE, 2013:1-5. [4] 童毅.并联式混合动力系统动态协调控制问题的研究[D].北京:清华大学,2004. [5] 严运兵,颜伏伍,杜常清.并联混合动力电动汽车动态协调控制策略及仿真研究[J].中国机械工程,2010,21(2):234-239. [6] 张娜,赵峰,罗禹贡,等.基于电机转速闭环控制的混合动力汽车模式切换动态协调控制策略[J].汽车工程,2014,36(2):134-138 [7] KOPRUBASI K.Modeling and control of a hybrid-electric vehicle for drivability and fuel economy improvements[D].Columbus:Ohio State University,2008. [8] 杨阳,黄剑锋,秦大同,等.双离合器式混合动力汽车模式切换控制策略[J].汽车工程,2013,35(8):723-730. [9] 杜波,秦大同,段志辉,等.新型并联式混合动力汽车工作模式切换扭矩协调控制策略研究[J].中国机械工程,2013,23(6):739-744. [10] 戴一凡,罗禹贡,李克强,等.单电机强混合动力电动车辆的动态协调控制[J].汽车工程,2011,33(12):1007-1012. [11] 张俊智,李波,薛俊亮,等.混合动力电动汽车冲击度的试验[J].机械工程学报,2008,44(4):87-91. [12] 陈海军,赵治国,王琪,等.干式DCT双离合器联合起步最优协调控制[J].机械工程学报,2014,50(22):150-164. (责任编辑 胡亚敏) Research on torque coordinated control strategy for hybrid electric vehicle in E-H mode switch KONG Huifang, WANG Rui, BAO Wei (School of Electric Engineering and Automation, Hefei University of Technology, Hefei 230009, China) In the hybrid electric vehicle(HEV) mode switch from the electric drive mode(E) to the hybrid drive mode(H), the difference of the response characteristics of the two power sources and clutch engagement will cause the problems of the unstable power transmission and the impact of the vehicle. To solve this problem, the torque coordinated control strategy is formulated. The entire torque coordinated control strategy is formulated according to three different stages of engine starting, speed governing and power access. HEV physical model and mode-switching dynamics model are built by Matlab/Simulink simulation to verify the effectiveness of the strategy. The simulation results show that the strategy can reduce the torque fluctuation and the jerk, effectively improving the smoothness in the process of mode switch. hybrid electric vehicle(HEV); torque coordinated control; mode switch; jerk 2016-01-06; 2016-02-28 国家“十二五”科技支撑计划资助项目(2014BAG06B02);中央高校基本科研业务费专项资金资助项目(2014HGCH0003) 孔慧芳(1964-),女,安徽蚌埠人,博士,合肥工业大学教授,博士生导师. 10.3969/j.issn.1003-5060.2017.03.001 TP271.4 A 1003-5060(2017)03-0289-063 评价指标

4 仿真实验



5 结 论
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
装备制造技术(2020年2期)2020-12-14
凿岩机械气动工具(2017年3期)2017-11-22
汽车维修技师(2017年9期)2017-02-04
中国机械工程(2015年13期)2015-12-16
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
噪声与振动控制(2015年4期)2015-01-01
客车技术与研究(2014年1期)2014-03-20
振动、测试与诊断(2014年4期)2014-03-01
