
针对在轨维护的爬行机器人足粘附机理研究
2017-09-27 05:29苏奕粼侯绪研曹盼薛萍萍唐天峰李龙陈涛姜生元
深空探测学报 2017年3期
苏奕粼,侯绪研,曹盼,薛萍萍,唐天峰,李龙,陈涛,姜生元
(1.哈尔滨工业大学 机电工程学院,哈尔滨 150080;2.上海大学 机电工程与自动化学院,上海 200444;3.苏州大学 苏州纳米科技协同创新中心,苏州 215123)
针对在轨维护的爬行机器人足粘附机理研究
苏奕粼1,侯绪研1,曹盼1,薛萍萍1,唐天峰1,李龙2,陈涛3,姜生元1
(1.哈尔滨工业大学 机电工程学院,哈尔滨 150080;2.上海大学 机电工程与自动化学院,上海 200444;3.苏州大学 苏州纳米科技协同创新中心,苏州 215123)
针对空间合作目标航天器在轨维护任务需求,提出一种新型结构的空间爬行机器人,可搭载于抓取机械臂上,在主动航天器和故障目标形成连接后,爬行移动到故障目标上需要维修的位置进行维修精细操作。该机器人移动系统主要由压电驱动腿、微修饰粘附足组成。其微观粘附足借鉴壁虎刚毛的粘附机理,设计微米级微阵列的机器人足端结构。在上述结构设计基础上,利用离散元软件建立其仿真模型,对壁虎的强吸附能力和快速脱附能力进行理论建模分析,建立单根刚毛在不同状态下的受力模型,模拟刚毛在不同脱附角下的粘附和脱附的过程,对其单个刚毛的粘附特性进行分析。仿真结果表明:在空间零重力环境下,通过不同运动方式可以实现单个刚毛的吸附和快速脱附的能力。为后续实现机器人足的吸附和快速脱附的能力提供了理论支持。
仿生;微阵列;离散元;粘附力
0 引 言
空间爬行机器人实现了一种新型的空间载荷操控方式[1-3],机器人在目标航天器表面粘附爬行对空间载荷操纵,从而实现了灵活性和可达性,同时降低了操作风险,机器人具有成本低、体积小、重量轻等优点,便于主动航天器执行多个任务,非常适合进行空间非合作目标的在轨操控任务。对空间爬行机器人进行的研究,将对空间在轨操控任务提供有力支持,为空间活动提供有力保障,具有重要的研究价值和现实意义。
进入21世纪以来,机器人在各行各业中都得到了广泛的应用和发展,其研究与应用水平已成为一个国家经济实力和科技发展水平的重要标志。爬行机器人是特种机器人的一种,是在恶劣、危险、极限等情况下进行特定作业的一种自动化机械装置,如今越来越受到人们的重视。为使其尽快完善,对壁面移动机器人的研究已成为机器人技术发展的热点之一。目前爬行机器人已在核工业、石化工业、建筑工业、消防部门、造船业等领域得到了应用。而对于空间环境下的爬行机器人需求,与壁面移动机器人功能相似。
未来的空间设施将会比现在的卫星和空间站更大、更复杂、更难实现,这就需要自主程度很高的机器人来配合大型的空间机械臂装配、检查和维护这些设施。为了实现机器人具有的灵活性、机动性,且便于携带的特点,空间作业中对爬行机器人的体积有着严格要求。因此,微小型爬行机器人的研究对空间爬行机器人设计具有重要的指导意义。为实现爬行机器人的微型化、集成化,国内外研究人员分别在仿生、新型驱动、新材料等多方面进行了深入研究。
空间爬行机器人的技术主要分为移动和吸附。传统爬壁机器人采用的吸附技术主要有磁吸附、负压吸附、静电吸附和化学粘附等[4]。世界上许多国家都开展了对爬壁机器人的研制,并取得了一定的研究成果[5-8],如图 1所示。

图1 爬壁机器人Fig.1 Wall-climbing robot
1 机器人本体结构设计
1.1 机器人机构构型
结合非合作目标表面形貌未知的特性,主要考虑通过转动关节实现机器人的运动。转动关节的越障能力较强,能够通过凹、凸过渡。地面上传统多足机器人能够跨越的最大高度与机器人的结构尺寸有关。然而在空间环境下没有重力作用,对机器人而言也没有“顶部和底部”之分,悬浮在空间中,因此可以通过翻转的方式进行越障,能够跨越的障碍尺寸不受机器人本身尺寸结构影响,只考虑机器人腿部尺寸与凹凸过渡形状跨越关系即可。
通过对壁虎身体结构与运动规律的分析,选择如图 2所示的机器人机构构型,具有5自由度,关节自由度采用2-1-2分布。即机器人的踝关节具有2个正交的自由度,而膝关节只有1个自由度,与本体连接部分具有2个正交的自由度。前端设计有两只操作手,可以进行维修、检测等相关工作。该机构在满足上述要求的前提下还具有如下优点:
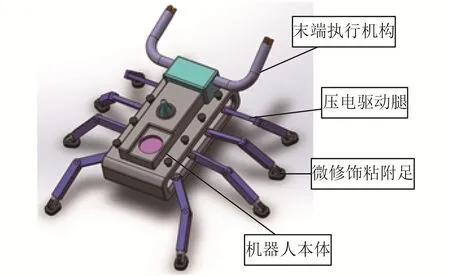
图2 机器人机构构型Fig.2 Robot mechanism
1)拥有多种平面运动方式,有利于实现复杂的工作任务;
2)采用对称结构,拥有在任意状态下完成工作任务的能力。
机器人本体与大腿之间由胯关节连接,大腿与小腿之间由膝关节连接,小腿和足之间由踝关节连接。机器人的胯关节和踝关节均具有2个自由度,机构形式为旋转-俯仰(Roll-Pitch)型,因为空间环境不考虑重力,因此采用压电马达直驱的方式,动力传动形式简单、实用,符合机构设计准则。
空间足式爬行机器人在实现运动过程中足起着关键作用,机器人的步态实现是通过足的交替与接触面的粘附及关节驱动实现的,空间环境中足与壁面的粘附性能直接影响到机器人能否可靠粘连及机器人的运动状态。为了实现足与接触面间的快速可靠粘附,足底采用仿生刚毛的方式进行设计。
1.2 运动功能研究
选定机器人的关节形式后,对机器人的运动功能作进一步的分析,检验了机器人满足预期的功能。
1)行走运动
机器人其中4只脚吸附,另外4只释放,抬起腿向前伸展,各关节旋转运动,直到足触觉传感器接触平面,等待4个足均接触并粘附后,抬起先前的4个足,向前迈步。通过行走运动可以实现机器人的爬行,转变方向以及以及从一个表面移动到另一个表面,图 3是通过行走运动实现方向的改变。图 4是通过行走运动,爬行机器人实现两个表面的相对位置在-90°的情况下。从一个表面移动到另一个表面的运动功能。

图3 实现方向的转变Fig.3 Achieve the function of changing direction
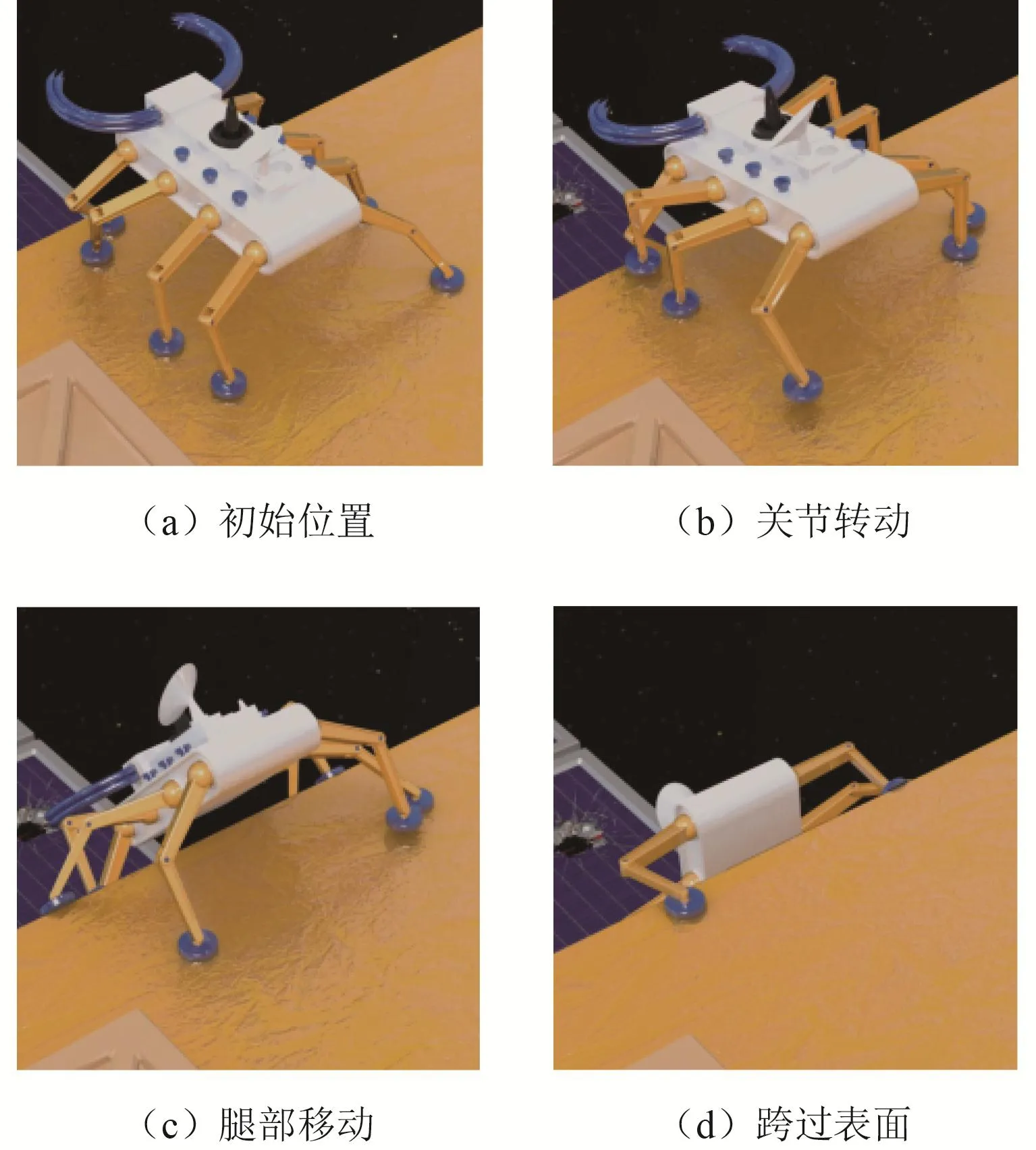
图4 实现跨表面运动Fig.4 Achieve the function across the surface
2)翻转运动
机器人首先一侧的4个足平行放置并粘附,另外一侧4个足释放,以粘附侧的4足关节为轴整体翻转,接着再以另一侧足触觉传感器接触平面为准,然后重复前面的翻滚动作,如图 5所示。通过翻转的方式进行越障,能够跨越的障碍尺寸不受机器人本身尺寸结构影响,只考虑机器人腿部尺寸与凹凸过渡形状跨越关系即可。
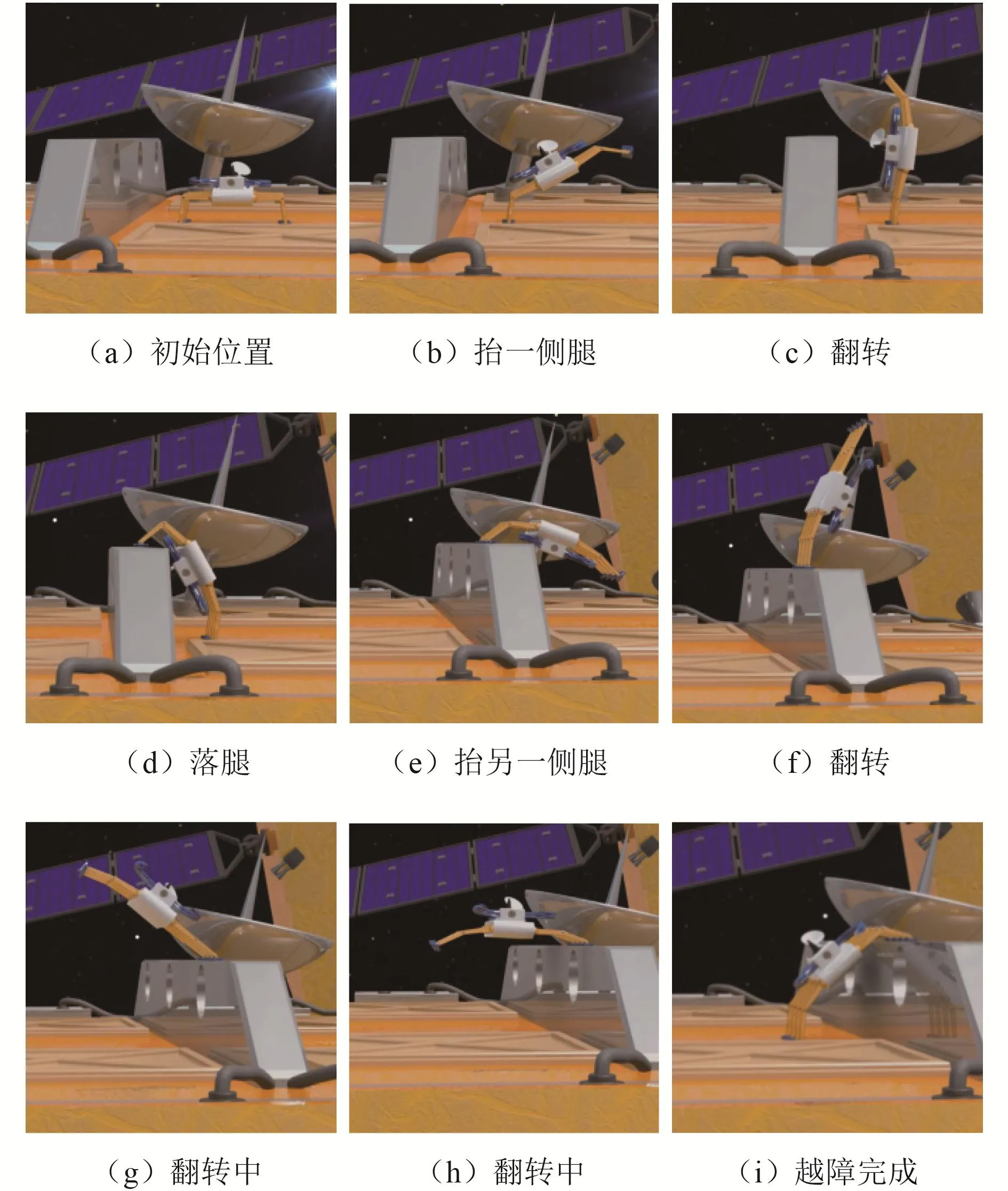
图5 通过翻转实现越障Fig.5 Crossing an obstacle by turnover movement
2 壁虎足末端结构分析
2.1 壁虎粘附机理的研究概况
国内外开展仿壁虎的研究主要围绕壁虎粘附与脱附机理展开。2000年,美国Autumn等测量了单根壁虎脚掌刚毛的粘附力,证明刚毛与表面接触的粘附力是通过分子间的范德华力作用实现的[9-11]。
在显微镜下,壁虎的脚掌如图 6所示。从图 6中可以看出,壁虎每支脚的底部长着数百万根极细的刚毛,而每根刚毛末端又有约400~1 000根更细的分支。1 mm2上约有5 000根长度为30~130 μm的刚毛,每支脚上就有近50万根刚毛,每根刚毛又有400~1 000根长度约0.5 μm、宽度约0.2 μm、厚度约5 nm的绒毛,纳米级的绒毛与接触表面接触并产生“范德华力”,完成脚掌的附着。

图6 壁虎脚掌的微观结构Fig.6 The gecko’s foot microstructure
壁虎脚掌在玻璃天花板上粘附和脱附的过程如图 7所示。壁虎附着于光滑的水平面,刚毛一律向着脚后取向,并向后拉伸,柔性脚瓣向外伸张,使刚毛最大程度地附着在物体表面上,增大粘附力;脱附时,壁虎脚掌外翻,改变刚毛的拉伸方向,便快速完成脱附,从而实现在光滑平面上自由行走。
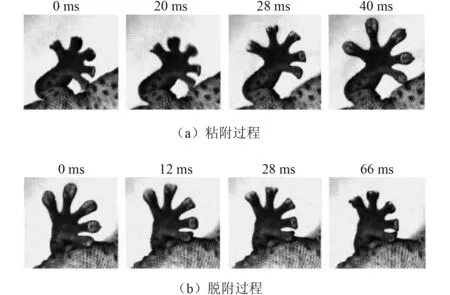
图7 壁虎脚掌在玻璃天花板上粘附和脱附的过程[12]Fig.7 Snapshots of gecko attaching and detaching from a glass ceiling[12]
2005年,高华健等对单根刚毛有限元模型的分析结果表明:30°为刚毛脱附和滑移同时发生的临界位置。刚毛的倾斜角在30°左右时,刚毛阵列的拉开力最大;倾斜角小于30°时,滑移先于脱附发生;倾斜角大于30°时,刚毛不会发生滑移,直接发生脱附。壁虎脚掌刚毛与接触表面成角大于30°时切向拉伸,可实现法向脱附力几乎为零的脱附[12]。
2.2 壁虎刚毛粘附理论模型分析
采用微接触理论来分析刚毛粘附与脱附的详细过程。微纳米结构由于具有较大的比表面积,其表面能量不可忽视甚至会占据主导地位,这是由尺度效应带来的表面效应。
JKR理论为微尺度下的经典接触理论,设两个颗粒的半径分别为R1和R2,弹性模量分别为E1和E2,泊松比分别为v1和v2如图 8所示。

图8 两个颗粒的接触示例图Fig.8 Schematic view of two spheres pressed together
对颗粒施加的法向载荷P值与接触半径a的关系式为

其中:R为等效半径;E为等效弹性模量;w为接触面粘附功。
颗粒的变形是受到施加的法向载荷和接触部分的粘附力的作用,当没有施加的法向载荷时,随着拉伸载荷的增大会使得接触半径越来越小,当a达到最小值,就是颗粒之间的最大脱附力。此时,法向载荷值为

在理论模型上,利用离散元仿真软件EDEM,将理论模型融入现有的JKR模型,建立机器人足单根刚毛和航天器表面的离散元仿真模型,如图 9所示。通过参数匹配确定机器人足、航天器表面的仿真参数以及两者间的相互作用特性参数。进而对机器人足粘附航天器表面的过程进行离散元仿真,分析机器人足的细微观结构对粘附性能的影响。

图9 机器人足与目标航天器接触微观示意图Fig.9 Microscopic diagram of robot foot and the surface of spacecraft
单根纤维的粘附力与纤维的半径成正比而不是面积。也就是说,在保证总的接触面积不变的情况下,总粘附力会随着单个纤维半径的减小而增大。设计具有高摩擦、低粘附特性的机器人足末端微阵列结构,从理论和仿真两条途径验证设计的可行性。
3 粘附机理仿真研究
3.1 基于离散元的单个刚毛仿真建模
壁虎在实际爬行中,脚底末端绒毛与脚掌面成一定的角度,且受到被接触表面的一定弹性力的作用,因此有必要分析单根粘附刚毛与接触面间的粘附作用。效仿壁虎脚掌的刚毛结构,首先提出一个倾斜微阵列的单个支杆模型,用离散元的方式对其建模,如图 10,假设支杆材料与壁虎刚毛材料相同,用EDEM离散元仿真软件对单根粘附支杆粘附分析,粘附支杆的颗粒间用bonding模型仿真,支杆与表面之间的粘附是基于JKR模型建立的。单个纤维的半径0.02 mm,颗粒半径为0.003 mm,粘附功为w= 2 mJ/m2。通过先预压再拉伸单个支杆脱离物体表面仿真单个支杆的脱附过程,进而分析其粘附特性。
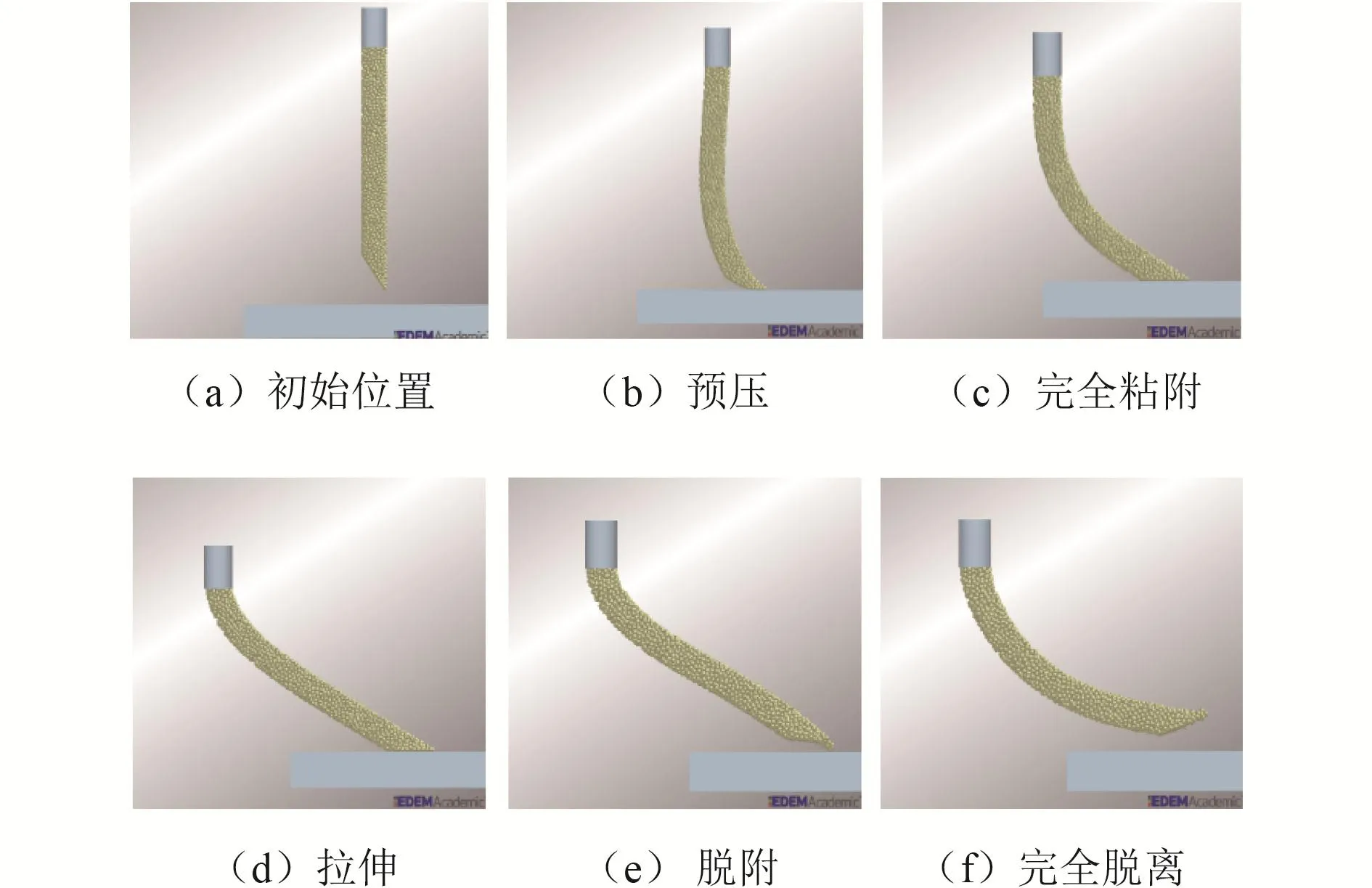
图10 单根支杆的离散元建模仿真过程Fig.10 The discrete element simulation process of a single fiber
3.2 仿真结果和分析
将重力加速度设置为零,仿真环境为真空环境。针对不同的支杆和物体表面的倾斜角,用离散元软件仿真壁虎刚毛在粘附过程中的5种接触状态,对这5种状态下的粘附情况进行仿真与分析,得到其不同倾斜角下的法向最大粘附力。各倾斜角下的单支杆EDEM仿真模型如图 11所示,各倾斜角下的支杆法向受力曲线如图 12所示。

图11 各倾斜角下的单支杆EDEM仿真模型Fig.11 The EDEM simulation model of single fiber with different slope angle
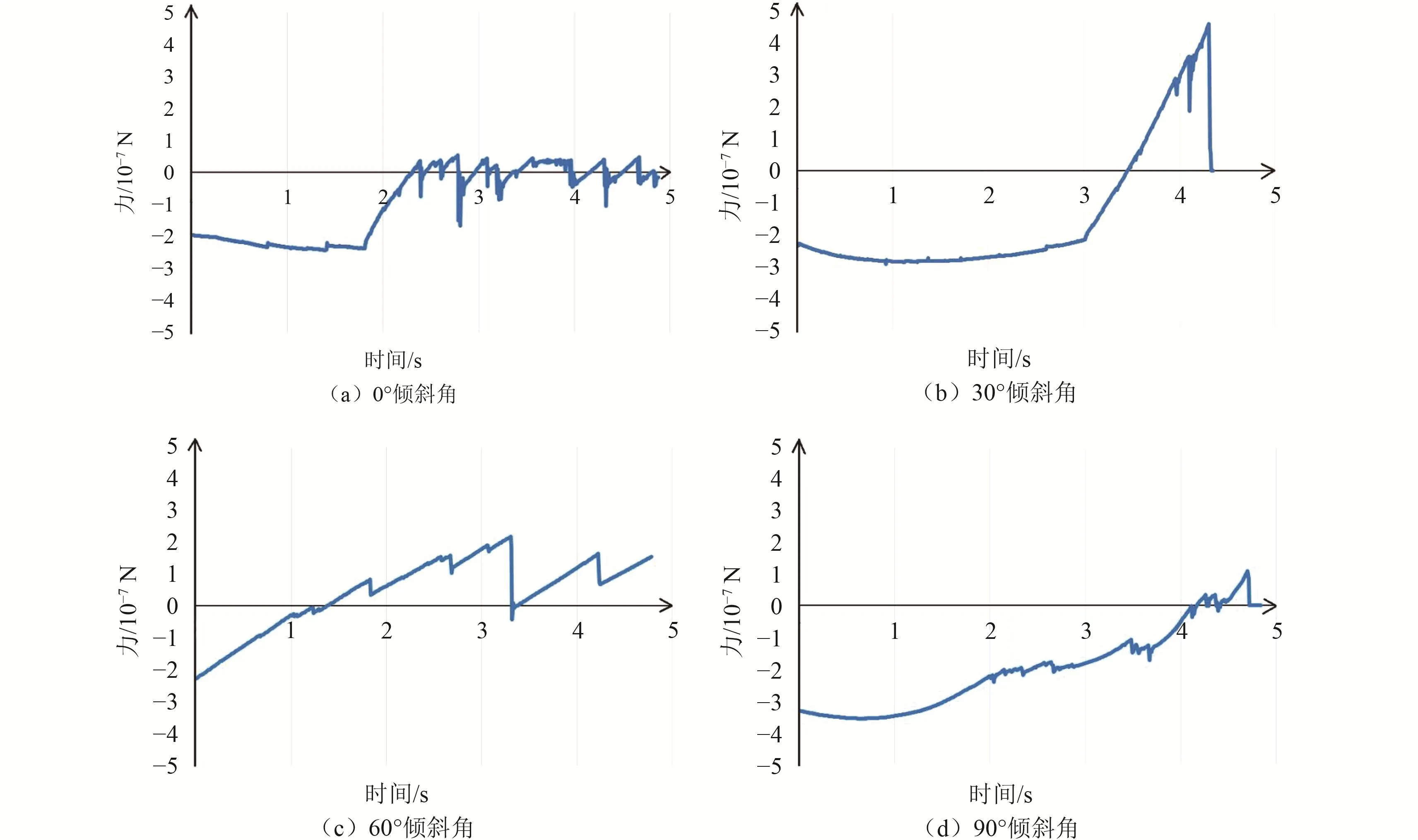
图12 各倾斜角下的支杆法向受力曲线Fig.12 The normal stress curve of single fiber with different slope angle
从图 12可知,当倾斜角为0°的时候,支杆的圆柱面与物体表面接触,支杆结构遭到破坏发生压溃使得其粘附特性失效。表 1是各倾斜角下的法向最大脱附力。倾斜角为30°时法向的粘附力最大,随着倾斜角的增大使得支杆在脱附时的粘附力减小,当倾斜角为90°时,其粘附力是30°时的1/5,这为爬行机器人的快速脱附功能提供了理论支持。

表1 各倾斜角下的法向最大脱附力Table 1 Maximum normal adhesive force in a variety of inclination angles
4 结 论
本文提出一种新型空间爬行机器人。该机器人移动系统由压电驱动腿,微观粘附足,和操控机构组成。机器人沿航天器表面失重爬行时,足末端的粘附力为机器人的运动提供动力。借鉴壁虎足端的刚毛结构设计机器人足端微阵列结构。在此基础上利用离散元软件EDEM,通过微小颗粒堆积的方法建立单根刚毛的离散元仿真模型,用JKR模型模拟单根刚毛在不同脱附角下与接触表面的粘附和脱附过程,并分析其粘附特性。通过仿真结果表明:单个刚毛在不同的倾斜角下的粘附力有所差异。这样在空间零重力环境下,可以通过不同运动方式实现不同的刚毛粘附状态,进而实现单个刚毛的易吸附和快速脱附能力。
[1]Letschnik J,Walter U,Artigas J.On-orbit servicing[J].Robotics & Automation Magazine IEEE,2009,16(4):29-33.
[2]Flores-Abad A,Ma O,Pham K,et al.A review of space robotics technologies for on-orbit servicing[J].Progress in Aerospace Sciences,2014,68(8):1-26.
[3]姜生元,沈毅,吴湘,等.月面广义资源探测及其原位利用技术构想[J].深空探测学报,2015,2(4):291-301.Jiang S Y,Shen Y,Wu X,et al.Technical schemes of investigation and in-situ utilization for Lunar surface generalized resource[J].Journal of Deep Space Exploration,2015,2(4):291-301.
[4]Hirose S,Nagakubo A.Legged wall-climbing robot[J].Journal of the Robotics Society of Japan,1992,10(5):575-580.
[5]Longo D,Muscato G.A modular approach for the design of the Alicia climbing robot for industrial inspection[J].Industrial Robot An International Journal,2004,31(2):148-158.
[6]Grieco J C,Prieto M,Armada M,et al.A six-legged climbing robot for high payloads[C]//6th IEEE Conference on Control Applications.Trieste:IEEE,1998.
[7]Armada M,Gonzalez P,Nieto J,et al.On the design and control of a self-propelling robot for hazardous environments[C]//Proc.21st Int.Symposium on Industrial Robots.Copenhagen:IFS Pub Ltd,1990.
[8]Armada M.Telepresence and intelligent control for a legged locomotion robot:in expert systems and robotics[M].Berlin:Springer Verlag,2011.
[9]Autumn K,Gravish N.Gecko adhesion:evolutionary nanotechnology[J].Philosophical Transactions of the Royal Society,2008,366(11):1575-1590.
[10]Autumn K,Chang W P,Hsieh T,et al.Adhesion force of a single gecko foot-hair[J].Nature,2000,405(8):681-684.
[11]Autumn K,Sitti M,Liang Y A,et al.Evidence for van der waals adhesion in gecko setae[J].PNAS,2002,991(19):12252-12256.
[12]Gao H J,Wang X,Yao H M,et al.Mechanics of hierarchical adhesion structures of geckos[J].Mechanics of Materials,2005,37(2):275-285.
Research of Adhesion Mechanism in Space Climbing Robot On-Orbit Servicing for Spacecraft
SU Yilin1,HOU Xuyan1,CAO Pan1,XUE Pingping1,TANG Tianfeng1,LI Long2,CHEN Tao3,JIANG Shengyuan1
(1.School of Mechatronics Engineering,Harbin Institute of Technology,Harbin 150001,China;2.School of Mechatronic Engineering and Automation,Shanghai University,Shanghai 200444,China;3.Collaborative Innovation Center of Suzhou Nano Science and Technology,Soochow University,Soochow 215123,China)
According to the on-orbit servicing requirements of space cooperative target spacecraft,in order to expand the existing manipulator work space and its task function and provide support for the on-orbit control of the spacecraft,a new type of space climbing robot is proposed.The space climbing robot system consists of legs driven by piezoelectric,micro adhesive feet and other parts.The space climbing robot is composed of eight legs driven by piezoelectric which has three joints and five degrees of freedom.It can extend crossing obstacle ability by somersault based on the traditional way of climbing.The robot feet are designed in micro array structure that based on the bionics principle and reference the micro structure on feet of gecko,insects or other creatures.Based on the theory of interface micro mechanics and tribology,the contact mechanics model between micro structure of the adhesive feet and the surface of spacecraft is established.Then it analyzes its adhesive properties based on discrete element method.The simulation results demonstrate that using different ways of movement can achieve different adhesive ability of single seta,which provides theoretical support for achieving the robot foot adhesive and rapid stripping ability.
bionic;microarray;discrete element method;adhesive force
V467
A
2095-7777(2017)03-0293-06
[责任编辑:杨晓燕,英文审校:任树芳]
10.15982/j.issn.2095-7777.2017.03.015
苏奕粼,侯绪研,曹盼,等.针对在轨维护的爬行机器人足粘附机理研究[J].深空探测学报,2017,4(3):293-298.
Reference format:Su Y L,Hou X Y,Cao P,et al.Research of adhesion mechanism in space climbing robot onorbit servicing for spacecraft[J].Journal of Deep Space Exploration,2017,4(3):293-298.
2016-12-01
2017-02-27
863-704专项资金资助项目(2015AA2256);中央高校基本科研业务费专项资金资助项目(HIT.NSRIF.2017028)
苏奕粼(1990- ),男,博士,主要研究方向:航天器工作环境及离散元仿真。
通信地址:黑龙江省哈尔滨市哈尔滨工业大学科学园2F栋405室(150001)
E-mail:hitrcamc@foxmail.com
侯绪研(1982- ),男,副教授,博士,主要研究方向:航天器工作环境及离散元仿真。本文通信作者。
通信地址:黑龙江省哈尔滨市哈尔滨工业大学科学园2F栋405室(150001)
E-mail:houxuyan@hit.edu.cn
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
实验流体力学(2022年6期)2022-02-06
新农民(2020年15期)2020-06-22
农业工程学报(2018年15期)2018-08-21
护理实践与研究(2016年12期)2016-10-31
发明与创新(2016年22期)2016-10-13
浙江理工大学学报(自然科学版)(2016年5期)2016-09-15
发明与创新·中学生(2016年6期)2016-05-14
电测与仪表(2016年12期)2016-04-11
中国环境科学(2015年7期)2015-08-30
