
机器人手臂轨迹跟踪的变增益LPV鲁棒H∞控制器设计
2018-01-06 07:46郭海峰窦福谈鲁宁波
沈阳理工大学学报 2017年6期
郭海峰,窦福谈,鲁宁波
(沈阳理工大学 自动化与电气工程学院,沈阳 110159)
机器人手臂轨迹跟踪的变增益LPV鲁棒H∞控制器设计
郭海峰,窦福谈,鲁宁波
(沈阳理工大学 自动化与电气工程学院,沈阳 110159)
针对机器人手臂模型中存在动态不确定性和外部干扰的不确定性,引入变增益线性变参数的鲁棒H∞控制方法,设计了手臂轨迹跟踪控制器。采用拉格朗日法建立机器人手臂轨迹跟踪动态方程;利用变增益线性变参数凸分解技术,将这一动态模型转化为具有凸多面体结构的线性变参数模型;根据鲁棒控制理论和线性矩阵不等式理论,在凸多面体的各个顶点设计反馈控制器,然后利用各个顶点控制器综合得到线性变参数控制器。仿真结果表明,机器人手臂对于关节位置的变化始终具有良好的跟踪性能。
机器人手臂轨迹跟踪;鲁棒H∞控制;变增益;线性变参数;线性矩阵不等式
机器人手臂轨迹指的是机器人操作过程中目标执行器的位置、速度、加速度等概念。机器人手臂轨迹跟踪控制的研究目标使得机器人手臂的运行平稳,输出的运行轨迹平滑。在工程实践中,机器人手臂系统始终受一些不确定的影响,如建模误差,动静摩擦力,负载的变化,各项参数温度的漂移等等[1]。机器人手臂系统是一种复杂的非线性不确定系统。目前应用于这类伺服运动控制系统的算法主要有PID、自适应、变结构、鲁棒控制等等[1-9]。针对这种外部干扰条件最差和内部参数摄动的复杂不确定非线性的机器人手臂系统,鲁棒H∞控制理论具有一定的优势。而非线性系统的控制问题很多时候可以转化为变增益控制问题,并且在工程中得到应用。这种方法的实质是首先设计局部控制器,然后在已有局部控制器的基础上综合得到全局控制器。近年来,由于鲁棒控制的不断发展,变增益控制也得到一定的发展,其中线性变参数(Linear parameter varying,LPV)方法已经得到实际应用[9]。机器人手臂系统的动态特性是一个非线性系统,它可以转化为关于关节位置及相关变量为参数的LPV模型。
本文的目的是针对内部参数不确定的复杂非线性机器人手臂动态模型,设计一种具有抑制干扰的轨迹跟踪的鲁棒H∞控制器,主要工作是:1)采用拉格朗日法建立机器人手臂轨迹跟踪动态方程;2)确定机器人的运动范围,利用变增益LPV凸分解技术,将这一动态模型转化为具有凸多面体结构的LPV模型;3)根据鲁棒控制理论和线性矩阵不等式理论,在凸多面体的各个顶点设计反馈控制器,然后利用各个顶点控制器综合得到线性变参数控制器;4)最后的仿真结果表明,机器人手臂对于关节位置的变化始终具有良好的跟踪性能。
1 机器人手臂轨迹跟踪动态方程
由文献[1],具有一般性考虑在竖直向上平面内两连杆机器人手臂轨迹跟踪动态方程,机械臂的运动受到重力的影响,应用拉格朗日动力学推到得到模型如下:

(1)




(2)


(3)

(4)
为便于利用LMI设计H∞控制器,将式(3)转化为状态空间描述。为了满足式(4),取
则式(3)的状态空间描述为
(5)
取检测信号z=x,则机器人的整体状态空间描述为
(6)
式中:

2 变增益LPV鲁棒H∞控制器设计
考虑文献[9]方法,由于矩阵A、B都是依赖于参数q的,利用LPV方法针对式(6)设计控制器。根据各个关节的运动范围,取四个顶点,φ1=(q1min,q2min),φ2=(q1min,q2max),φ3=(q1max,q2max),φ4=(q1max,q2min)组成一个凸四面体,由凸分解技术处理式(6)得到
(7)
式中



在四个顶点φm1、φm2、φm3及φm4分别设计满足性能要求的状态反馈控制器K1、K2、K3、K4,则对于任意的位置q,可利用如下方法得到该控制器
K=ρ1(q)K1+ρ2(q)K2+ρ3(q)K3+ρ4(q)K4
(8)
下面进行鲁棒H∞控制器的设计。假设R为机器人的参考输入,z为误差。要求机器人能够准确跟踪参考输入,也就是要求在R的输入下,z具有H∞性能。控制系统模型如下所示:
(9)
对于系统(9)设计一个状态反馈控制器
u=Kx
(10)
将式(10)带入到式(9)中,得到闭环控制系统
(11)
则系统(11)的闭环传递函数为
TRZ=(sI-A-B2K)-1B1
(12)
有界实引理[10]:设计的控制器(10)要求满足以下性质:
(1)闭环系统内稳定。
(2)从干扰信号R到检测信号z的闭环传递函数TRZ的无穷范数小于1,即
‖TRZ‖=‖(SI-A-B2K)-1B1‖<1
(13)
基于上述要求的控制器,推导得到以下定理。
定理:对系统(11),存在一个状态反馈H∞控制器,当且仅当存在一个对称正定矩阵X和矩阵W,使得矩阵不等式
(14)
成立。进一步,如果矩阵不等式存在可行解X、W,则u=(WX-1)x就是系统(5)的一个状态反馈H∞控制器。矩阵不等式(14)是矩阵变量X、W的线性矩阵不等式,可以用LMI中的feasp来求解该线性矩阵不等式。
对于给定标量γ>0,求系统的γ次优H∞控制器,则按照以下思路进行处理:
‖TRZ‖<γ⟺‖γ-1TRZ‖<1
(15)
这样转化为标准H∞控制问题,相应的矩阵不等式为
(16)
基于式(16),可以转化为优化问题的求解,即
minγ
s.t.
(17)
使得X>0。这样,最小的干扰抑制度就是γ,矩阵不等式(17)可以通过LMI中的mincx来求解该优化问题。利用上述方法求得四个顶点的反馈增益矩阵,再利用式(8)可以求得任意位置的反馈增益矩阵K。
3 仿真算例
对式(1)进行仿真研究,相关参数如表1所示。

表1 二自由度机械臂的标称参数

由以上四个反馈增益矩阵,通过式(4)得到整个LPV变增益反馈矩阵,通过在线计算ρi(i=1…4)可以得到具体位置的增益反馈矩阵。
K=ρ1(q)K1+ρ2(q)K2+ρ3(q)K3+ρ4(q)K4

所以,根据以上所述,得到系统的LPV反馈控制器u=Kx。


图1 两个关节的位置响应曲线

图2 两关节控制力矩响应曲线
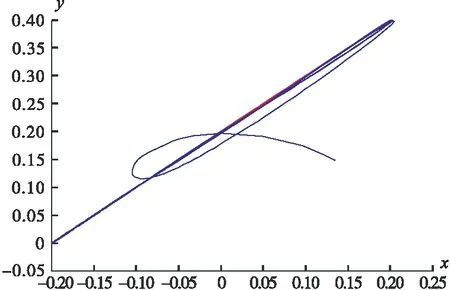
图3 机器人手臂轨迹跟踪曲线
从图1可看出,在控制器作用下,关节1和关节2对快速变化的参考输入具有很强的跟踪能力。图2给出输出控制力矩的曲线表明关节1的控制力矩有一定摆动,而关节2的控制力矩运动平滑,上升时间较小。图3显示机器人手臂末端轨迹的跟踪曲线基本与参考轨迹重合。仿真结果表明采用这种控制方法,机器人手臂对于关节位置的变化始终具有良好的跟踪性能。
4 结论
机器人手臂轨迹跟踪模型中存在动态不确定性和外部干扰的不确定性,这使得模型具有时变、强耦合、非线性等复杂的动力学特性。本文引入变增益线性变参数的鲁棒H∞控制方法,设计了机器人手臂轨迹跟踪控制器。这一方法的实质是在外部条件最差和内部参数摄动的不确定条件下,采用矩阵变换方法和变增益线性变参数凸分解技术,将这一动态模型转化为具有凸多面体结构的线性变参数模型。再根据鲁棒控制理论和线性矩阵不等式理论,在凸多面体的各个顶点设计反馈控制器,然后利用各个顶点控制器综合得到线性变参数控制器。仿真结果表明机器人手臂关节位置的变化始终具有良好的跟踪性能。
[1] 申铁龙.机器人鲁棒控制基础[M].北京:清华大学出版社.2000.
[2] 许春山,孙兴进,曹广益.一种机器人轨迹跟踪滑膜变结构控制[J].计算机仿真,2004,21(7):115-119.
[3] 温金环,王红.一类不确定性机器人的鲁棒跟踪控制[J].工程数学学报,2004,21(4):531-536.
[4] 周景雷,张维海.一种机器人轨迹的鲁棒跟踪控制[J].控制工程.2007,14(3):336-340.
[5] 李菁,刘国栋.机器人的鲁棒自适应轨迹跟踪控制[J].江南大学学报,2008,7(4):448-452.
[6] Zuo Y,Wang Y N,Liu X Z,et al.Neural network robustH∞tracking control strategy for robot manipulator[J].Applied Mathemtical Modeling,2010,34(7):1823-1838.
[7] Yang Z J,Fukushima Y,Qin P.Decentralized adaptive robust control of robot manipulators using disturbance observers[J].IEEE Transactions on Control Systems Technology,2012,20(5):1357-1365.
[8] Kolhe J P,Shaheed M,Chandar T S,et al.Robust control of robot manipulators based on uncertainty and disturbance estimation[J].International Journal of Robust and Nonlinear Control,2013,23(1):104-122.
[9] 虞忠伟,陈辉堂,王月娟.基于LMI方法的机器人LPV鲁棒H∞控制器设计[J].控制与决策,2001,16(2):146-150.
[10]P Gahinet,P Apkarian.A linear matrix inequality approach toH∞control[J].Int J Robust Nonlinear Contr,1994,4(3):421-448.
RobustH∞ControllerDesignforRobotManipulatorsTrajectoryTrackingBasedonVariableGainLPV
GUO Haifeng,DOU Futan,LU Ningbo
(Shenyang Ligong University,Shenyang 110159,China)
According to the dynamic uncertainties and external disturbance uncertainties of robot manipulator model,a kind of robustH∞controller design method with the variable gain linear parameter varying is introduced,and Robot manipulators trajectory tracking controllers are designed.Dynamic equations of the Robot manipulators trajectory tracking are established by Lagrange method,which adopts the variable gain linear parameter varying and convex decomposition technique,and the variable parameter models of dynamic models are transformed,the variable parameter models of the dynamic models are transformed into the linear parameter varying models with the convex polyhedron structure.Based on robust control theory and linear matrix inequality theory,the feedback controller at each vertex of the convex polyhedron is designed.Then,linear parameter varying controller is obtained by using each vertex controller.Simulation results show that robot manipulators have good tracking performance for the joint position change.
robot manipulator trajectory tracking;robustH∞control;variable gain;linear parameter varying;linear matrix inequality
2017-03-03
国家自然科学基金-青年科学基金资助项目(61402475)
郭海峰(1970—),男,教授,博士,研究方向:先进控制理论与应用、系统工程与供应链管理。
1003-1251(2017)06-0056-05
TP273
A
马金发)
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
今日农业(2020年14期)2020-12-14
电子制作(2019年19期)2019-11-23
自动化学报(2019年6期)2019-07-23
电子制作(2018年19期)2018-11-14
自动化学报(2017年4期)2017-06-15
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
少儿科学周刊·少年版(2015年4期)2015-07-07
浙江大学学报(工学版)(2015年1期)2015-03-01
电子设计工程(2014年18期)2014-02-27
