
基于“玉兔号”月面数据的图像分割算法研究
2018-01-06 07:47李东宾高宏伟
沈阳理工大学学报 2017年6期
李东宾,高宏伟,2,王 辉
(1.沈阳理工大学 自动化与电气工程学院,沈阳 110159;2.中国科学院沈阳自动化研究所 机器人学国家重点实验室,沈阳 110016)
基于“玉兔号”月面数据的图像分割算法研究
李东宾1,高宏伟1,2,王 辉1
(1.沈阳理工大学 自动化与电气工程学院,沈阳 110159;2.中国科学院沈阳自动化研究所 机器人学国家重点实验室,沈阳 110016)
月球表面环境感知是月球车自主导航的关键,月岩和月坑作为代表性的月面环境特征是月球车行驶过程中的主要障碍物。针对月球车自主导航和探测问题提出一种月岩和月坑的分割方法,首先对具有代表性的月面环境(月岩、月坑)进行各异向性扩散滤波(PM滤波),然后用最大类间方差法(Otsu)进行详细研究,对比分析最大类间方差法及基于最大类间方差法的两种改进方法。实验结果表明,基于粒子群的二维最大类间方差法在分割月岩和月坑图像时可取得较理想的效果。最后结合已有的三维重建平台,很好地在其基础上加入图像分割模块,为下一步避障和路径规划做准备。
月岩月坑分割;二维Otsu;粒子群;PM滤波;
月球是距离地球最近的自然天体.对其进行探测将具有重要的价值,由于月面环境和地面环境相比,具有情况更加复杂、不确定性因素多、高度依赖视觉图像等特点,因此能够更好的进行探测试验一直是国内外研究的重点。
在进行星际探测时,无人探测车是一种经济、高效的工具。但由于环境的未知性,建立一套切实可靠的感知系统十分必要。在月球车探测过程中,遇到的障碍物主要包括月岩和月坑等,因此准确的识别出这些障碍物是进行探测活动的关键。针对月球表面的月岩和月坑识别方面,目前研究的相关文献较少,较多的是针对月球陨石坑的研究[1-2]。吉林大学在月表月岩和月坑的研究方面提出了几种有效的识别方法,主要有结合最小误差分割原理的形态学梯度法[3]、基于Fisher准则函数分割算法[4]和基于区域生长[5]等方法。
2013年12月2日,我国成功发射了嫦娥三号探测器,并陆续展开了“观天、看地、测月”的科学探索和其他预定任务。而搭载其上的月面巡视探测器(“玉兔号”月球车)是我国第一个实现月球软着陆的无人登月探测器,月球车配置了全景相机、测月雷达等4种科学探测有效载荷[6]。全景相机作为玉兔号的重要科学载荷,主要依靠月球车的自我移动及桅杆提供的方位和俯仰运动实现对不同区域的成像。
本文针对嫦娥三号探测任务,利用“玉兔号”无人探测器发回来的科学数据对月面环境进行研究。首先对获得的全景相机照片进行各异向性扩散滤波,然后在此基础上利用基于粒子群改进的二维最大类间方差法进行二值化,最后结合形态学去除噪声并利用外接矩形在原图中标出所要分割目标,即月岩和月坑。为下一步路径规划和自主导航提供技术支撑。
1 各向异性扩散滤波原理
全景相机在月球车的位置如图1所示。
嫦娥三号全景相机是一套双目光学仪器,左右2台相机共同安装在巡视器桅杆上,主要参数如表1所示。

表1 全景相机主要参数

图1 我国第一个无人登月探测器
数字图像的噪声主要来源于图像的获取和传输过程。在图像的预处理过程中,常见的滤波算法有均值滤波、中值滤波、高斯滤波等。各向异性扩散滤波[7-8]主要用来平滑图像,其克服了高斯模糊的缺陷,能够很好的保留图像边缘。
20世纪90年代初期,Perona等[9]根据热传导方程建立了各异向性扩散方程,并将其应用到图像处理中(称PM算法)。PM算法将图像看作热量场,每个像素看作热流,根据当前像素和周围像素的关系,来确定是否要向周围扩散;其主要思想是将图像在尺度空间中划分为不同尺度的区域,在同一尺度区域内进行平滑,而在不同尺度区域之间(边缘或边界)减少平滑,因此在某种意义上也可以将PM算法看成对图像边缘“增强”。在PM算法中,边缘采用常用的梯度微分算子来识别,其主要迭代方程如下:
(1)

(2)
(3)
当梯度较小时,意味着对应的中心像素在尺度区域内,这时扩散方程如同低通滤波一样进行平滑;当梯度较大时,意味着对应的中心像素是边缘或在边缘附近,这时扩散方程扩散的行为变得很不明显,从而保持了图像的边缘信息。
为验证各向异性扩散滤波能够有效地保留图像边缘信息,以标准测试图像house和常用的高斯滤波为例,分别对原图进行各异向性扩散滤波和高斯核为3×3的高斯滤波,然后进行参数相同的canny边缘检测,效果如图2所示。

图2 边缘检测效果图
由图2可知,各异向滤波相比高斯滤波可以更好地保留边缘。其中各异向滤波边缘像素个数为2033个,所占视场比率为0.0310211;高斯滤波边缘像素个数为1956个,所占视场比率为0.0298462。
2 形态学原理
形态学(morphology)一词通常表示生物学的一个分支。而图像处理中的形态学,往往指的是数学形态学(Mathematical morphology),它是建立在格论和拓扑学基础上的图像分析学科,其基本运算包括:腐蚀和膨胀、开运算和闭运算、击中击不中变换等。
最基本的形态学操作有两种,分别是:膨胀和腐蚀。其他操作都是建立在最基本的操作之上。从数学角度来说,膨胀和腐蚀是将图像与核进行卷积运算。通常核是一个小的、中间带有参考点的正方形或圆形,也可以是任意形状和大小。膨胀和腐蚀主要用来消除噪声、求图像的梯度等。实验部分正是运用形态学来消除噪声以达到提取目标(月岩和月坑)的目的。
3 图像分割
图像分割在图像处理中占有十分重要的地位,分割结果的好坏直接影响到图像的后续处理,甚至最终结果。阈值分割是图像分割中常用的方法,其难点是分割阈值的选取。针对不同的应用场景,阈值的选取也有所不同,常用选取阈值的方法[10]有:迭代法、双峰法、最大类间方差法、最大熵法等等。本文针对月面真实环境,就最大类间方差进行详细讨论,对比最大类间方差法及基于最大类间方差法的两种改进方法。下文提及的前景目标均为月岩或月坑。
3.1 自适应阈值算法原理
在图象分割中,阈值化是一个广泛使用的工具,最大类间方差[11](Otsu)法是一种自动非监督的阈值选择法,最早由日本学者提出,又叫大津法,简称Otsu,是基于一种判别式测度准则,最佳的阈值在该测度函数取最大时得到,其基本思想是按图像的灰度特性,将图像分成背景和前景部分。背景和前景之间的类间方差越大,说明构成图像的这两部分差别越大,分割越精准。该方法具有速度快、容易实现等优点。
Otsu算法的流程如下:
假定阈值t将图象分成前景μ0和背景μ1两个部分。
Step1:计算直方图并归一化,前景点数占图像比例为ω0,平均灰度为μ0;背景点数占图像比例为ω1,平均灰度为μ1。
Step2:计算整幅图像灰度均值:μ=ω0μ0+ω1μ1。
Step3:前景和背景图像的方差为
g(t)=ω0*(μ0-μ)2+ω1*(μ1-μ)2
使得g(t)取得最大值时的t即为所求得的阈值T。
3.2 二维最大方差法算法原理
在实际图像中由于噪声干扰等因素的影响,使得图像的灰度直方图分布不一定出现明显的波峰和波谷。此时一维Otsu算法不适合用于确定图像的分割阈值,因此引入二维直方图[12],将灰度信息扩散到二维[13-14]。
设f(x,y)(1≤x≤M,1≤y≤N)是一幅大小为M×N的图像,其灰度级为L。在每个像素点处,计算其n×n邻域的平均灰度值,得到一幅平滑的图像g(x,y)。由此可形成一个二元组:像素点的灰度值和其邻域的平均灰度值。设rij为图像中灰度级为i邻域灰度级为j的像素的个数,那么定义相应的联合概率密度pij=rij/(M×N),i=1,2,…,L,j=1,2,…,L。pij即为图像的二维直方图,是一个L×L的矩阵,如图3所示。

图3 二维直方图
假设阈值向量(s,t)将二维直方图分成4个区域。对于背景和目标内部的像素而言,其灰度值与邻域平均值接近,而对位于边界和噪声处的像素,其灰度值与邻域平均值有很大差别,因此区域0和1代表目标或背景区域,而区域2和3代表边界点或噪声点。由于边界和噪声点占极少数,因此可假设二维直方图中远离对角线的分量近似为0。设图像中存在背景C0和目标C1两类,那么两类的概率分别为
(4)
(5)
背景C0和目标C1两类对应的均值向量分别为
(6)
二维直方图总的均值向量为

由于假设远离对角线方向的分量近似为零,有
ω0+ω1≈1,μT≈ω0μ0+ω1μ1
(8)
定义类间方差矩阵为

(9)
以矩阵σB(s,t)的迹作为类间离散度的测度
tr[σB(s,t)]=
(10)


(11)
即在L×L空间内搜索使得式(11)最大。
为验证二维直方图的分布特性,利用分辨率为512×512的灰度Lenna标准测试照片,生成的二维直方图如图4所示。
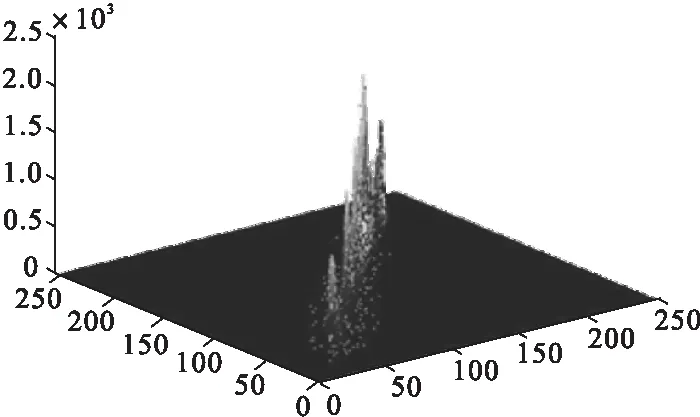
图4 Lenna的二维直方图
3.3 基于粒子群的二维最大方差法原理
二维Otsu方法同时考虑了图像的灰度信息和像素间的空间邻域信息,是一种有效的图像分割方法,针对二维Otsu方法计算量大的特点,采用粒子群算法[15]来搜索最优二维阈值向量。
受鸟集群飞行觅食行为的启发,Kennedy等于1995年提出了一种新的进化算法,即粒子群算法(PSO)[16]。PSO是一种基于群体和适应度的全局优化方法,在PSO算法中,群体中的每个个体称为“粒子”,在D维解空间中,每个粒子i有一个位置xi=(xi1,xi2,…,xiD)和“飞行”速度vi=(vi1,vi2,…,viD)。粒子的位置表示问题的解,其对应的目标函数值作为评价该粒子优劣程度的适应度,速度表示粒子在解空间中的当前位置移动到下一个位置的速度大小。
PSO算法首先初始化一群具有随机位置和速度的粒子,然后通过迭代的方式在解空间中寻找最优解。在迭代过程中,每个粒子动态跟踪两个极值来更新其位置和速度。假设在第t次迭代时刻,粒子i目前所找到的最优解为pBesti,称为个体极值;整个粒子群目前找到的最优解为gBest,称为全局极值。在t+1次迭代时刻,粒子i根据上述两个极值,由以下公式更新自己的速度:
(12)
然后以速度vi(t+1)从当前位置移动到下一个位置,即
xi(t+1)=xi(t)+vi(t+1)
(13)
式中:t代表迭代次数;w代表惯性因子;c1和c2是学习因子,通常c1=c2=2;r1、r2是均匀分布在(0,1)区间上的随机数。为防止粒子陷入局部最优,迭代过程中粒子的速度限制[2,vmax],vmax=5,进而保证粒子位置可以覆盖整个灰度空间。粒子在解空间中不断地跟踪个体极值和全局极值进行搜索,直到达到规定的迭代次数N=50。
为减少二维Otsu分割方法的计算量,本文采用粒子群算法来搜索最佳的阈值向量,其基本流程如下:
Step1:随机生成m个二维粒子,粒子的位置从(10,50)之间随机产生,速度在[ -vmax,vmax]之间随机产生。实验时m=20,vmax=5。
Step2:根据最大类间方差公式计算每个粒子的方差,更新m个粒子的局部极值pBesti(i=1,2,…,m)和整个粒子群的全局极值gBest。
Step3:根据速度和位置更新公式更新每个粒子。实验时w=0.9-t×0.5/N,c1=c2=2。
Step4:令t=t+1,返回Step2直至t=N。
Step5:输出粒子群的最佳阈值向量(s′,t′),因为s′和t′十分接近,本文利用s′作为最佳阈值。
设分割后图像为fs′,t′(x,y),则
(14)
4 实验结果
4.1 图像滤波实验
根据式(1)~式(3)进行试验,分别对月岩和月坑照片进行滤波,实验效果如图5所示。

图5 滤波前后效果图
4.2 图像分割实验
为验证上述算法在月面环境下分割目标月岩、月坑的有效性。以下所有试验数据均在处理器为Inter(R) Core(TM) i5-4590 CPU为 3.30GHz、运行内存为4G、系统为64位Window7的台式电脑上进行。
采用本文4.1节滤波后的照片,然后分别利用Otsu、二维Otsu和PSO+二维Otsu求取最佳阈值,结果如表2所示。

表2 图像分割最佳阈值
由表2可知,月岩图像在Otsu算法下取得的阈值和改进后的两种算法差别较大,即采用Otsu算法得到最佳阈值为68,而采用二维Otsu算法时得到结果为77。月坑图像在三种算法下取得阈值较为接近。对比二维Otsu算法和二维Otsu+PSO算法在最佳阈值处的类间方差,可知二维Otsu+PSO算法得到的类间方差(398.184/2653.34)均大于二维Otsu算法得到的类间方差(397.74/2649.21),即二维Otsu+PSO算法可以最大化分开前景目标和背景,并且二维Otsu+PSO的运算时间相比二维Otsu略有提高。综上,二维Otsu+PSO算法在阈值获取和时间效率上均可达到最优。
月岩和月坑的提取效果如图6、图7和图8所示,由效果图可知,针对需要分割的目标月岩和月坑,分割准确率达到100%,没有出现误分情况。其中图6a、图7a、图8a和图6d、图7d、图8d均为采用上述算法取得的二值图;图6b、图7b、图8b和图6e、图7e、图8e均为利用形态学去噪后从背景中分离出来的前景目标;图6c、图7c、图8c和图6f、图7f、图8f均为在原图中将目标利用外界矩形标出的效果图。

图6 月岩和月坑的提取效果图(Otsu)

图7 月岩和月坑的提取效果图(二维Otsu)

图8 月岩和月坑的提取效果图(二维Otsu+PSO)
5 结论
本文在“玉兔号”数据的基础上,针对月球车自主导航和探测问题提出了一种基于粒子群的二维最大类间方差法的分割算法。通过实验对比可以发现基于粒子群改进的二维最大类间方差法更适合于月表月岩和月坑的分割。结合形态学去噪等操作成功分割出目标区域:月岩和月坑,并且能够很好地满足已有三维重建平台的要求,为后期进行路径规划和自主导航提供技术储备。
[1] 丁萌,曹云峰,吴庆宪.一种从月面图像检测陨石坑的方法[J].宇航学报,2009,30(3):1243-1248.
[2] 何江.基于陨石坑匹配的月球精确着陆导航方法研究[D].哈尔滨:哈尔滨工业大学,2010.
[3] 王荣本,顾柏园,郭烈,等.月球环境感知中的石块识别方法研究[J].计算机工程,2006,32(15):174-175.
[4] 张如高.基于机器视觉的月表石块识别方法研究[D].长春:吉林大学,2007.
[5] 杨强,吴中福,余萍.一个基于区域生长的石块图像分割系统[J].计算机科学,2004,31(9):191-193.
[6] 代树武,吴季,孙辉先,等.嫦娥三号巡视器有效载荷[J].空间科学学报,2014,34(3):332-340.
[7] 钱惠敏,茅耀斌,王执铨.基于各向异性扩散的几种平滑算法比较及改进[J].南京理工大学学报:自然科学版,2007,31(5):605-611.
[8] 马捷,严家斌,刘贵忠,等.混合噪声的各向异性扩散平滑[J].中南大学学报:自然科学版,2010,41(1):231-237.
[9] PERONA P,MALIK J.Scale-space and edge detection using anisotropic diffusion[J].IEEE Transactions on Pattern Analysis & Machine Intelligence,1990,12(7):629-639.
[10]齐丽娜,张博,王战凯.最大类间方差法在图像处理中的应用[J].无线电工程,2006,36(7):25-26.
[11]王璇,张帆,程京.基于改进最大类间方差法的灰度图像分割[J].微计算机信息,2010,26(35):206-207.
[12]王永波,陈继荣.二维Otsu阈值分割算法的改进及应用[J].计算机仿真,2008(4):263-266.
[13]唐英干,刘冬,关新平.基于粒子群和二维Otsu方法的快速图像分割[J].控制与决策,2007,22(2):202-205.
[14]吴一全,樊军,吴诗婳.改进的二维Otsu法阈值分割快速迭代算法[J].电子测量与仪器学报,2011,25(3):218-225.
[15]徐翠,陈蒙爱,王广君.基于粒子群算法的二维Otsu阈值分割法[J].仪器仪表用户,2009,16(2):102-103.
[16]KENNEDY J,EBERHART R.Particle swarm optimization[C]//IEEE International Conference on Neural Networks Proceedings,Perth,Western Australia,1995:1942-1948.
ResearchonImageSegmentationAlgorithmBasedon“JadeRabbit”Data
LI Dongbin1,GAO Hongwei1,2,WANG Hui1
(1.Shenyang Ligong University,Shenyang 110159,China;2.State Key Laboratory of Robotics,Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang 110016,China)
Lunar surface environmental perception is the key to lunar rover autonomous navigation.Moon rocks and moon pits are main obstacles as representative characteristics of lunar surface in the driving process of lunar rover.A segmentation method is proposed for lunar rover navigation and detection problems.The maximum interclass variance method (Otsu) is studied in detail after performing anisotropic diffusion filter (PM filter).The maximum interclass variance method and two improved methods based on the maximum interclass variance method are compared and analyzed.Experimental results show that Particle swarm algorithm based two-dimensional maximum interclass variance method can achieve better results for segmenting images of moon rocks and moon pits,which provides technical reserves for obstacles avoidance and path planning combined with the existing three-dimensional reconstruction platform.
moon rocks and splits segmentation;Two-dimensional Otsu;particle swarm optimization;PM filter;
2017-03-31
机器人学国家重点实验室开放课题资助项目(2016008)
李东宾(1992―),硕士研究生;通讯作者:高宏伟(1978―),男,教授,博士,研究方向:计算机视觉、智能控制。
1003-1251(2017)06-0061-07
TM921.01
A
王子君)
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
无线互联科技(2020年22期)2021-01-11
弹箭与制导学报(2020年2期)2020-09-01
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
摄影之友(影像视觉)(2018年12期)2019-01-28
传感器与微系统(2018年7期)2018-08-29
初中生世界·九年级(2017年10期)2017-11-08
自动化学报(2017年4期)2017-06-15
