一种海洋环境噪声测量浮标系统设计
2018-01-22 03:38王科明韦俊霞
声学与电子工程 2017年4期
王科明 韦俊霞
(第七一五研究所,杭州,310023)
海洋环境噪声也被称为自然噪声,是除去海洋中单个可辨别的噪声源后剩下的噪声背景,是水声信道中的一种干扰背景场,它的存在降低了声呐设备的检测能力[1]。浮标是获取海洋环境噪声信息的重要技术装备,同时在浮标平台上能够携带或搭载多种传感器模块和水下探测设备,长期、连续、定点、多深度地测量各个参数,因此,浮标在海洋科考的多个领域得到了广泛的应用[2]。目前,国内外浮标的观测数据和信息存储在各自测量设备的数据记录仪模块中,人们想要获取这些资料,需读取回收后浮标平台上各个存储单元来,因此该系统最大的缺陷是各个传感器采集的数据不同步。分别读取传感器的各个存储模块,在水下工作过程中无法回传特征参数,给海洋科考造成了比较大的困难和不便。针对该种情况,本文设计了同步采集传输噪声测量浮标系统,固定海域长时间采集海洋环境噪声、温度和深度信息,并实时传输。该设备采用四路水听器采集海洋环境噪声信息,两元温深传感器采集海面以下不同深度的温度信息,采集的数据集中存储于浮标电子舱中,并提取海洋环境的特征参数通过北斗通信系统实时回传至船基显控单元。
1 背景噪声功率谱估计
在噪声的研究中,除了概率密度函数、数学期望和方差等参数外,噪声的相关函数或者功率谱,也是表征噪声统计特性的重要统计量。由随机过程理论可知,噪声自相关函数和功率谱密度函数互为傅里叶变换。随机量p(t)的自相关函数被定义为[3]:

相应地,功率谱密度函数就是

式中,p(t)为环境噪声时域信号,R(τ)为噪声自相关函数,S(ω)为功率谱密度。
功率谱是功率谱密度函数的简称,它定义为单位频带内的信号功率,表示了信号功率随着频率的变化情况,即信号功率在频域内的分布状况。
2 噪声测量浮标系统设计
为了研究浅海海域中低频海洋环境噪声,我们设计了海洋噪声测量浮标系统,在测量海洋噪声的同时,同步采集海域中各个水深状态下的海水温度,记录各个测量噪声水听器的水深信息。海洋环境噪声数据、海水温度数据以及垂直阵段水深数据都存储在浮标电子舱中的存储模块中,并且垂直阵段中均匀分布的四个水听器的特征参数通过北斗通信系统传回岸基显控单元,方便试验人员实时了解布放在预定海域中的浮标工作情况和当前海域中的环境变化情况。为了避免垂直阵在测量海洋环境噪声时海面波浪冲击浮标体引起垂直阵中低频信号幅度过大而输出信号限幅,在浮标体和垂直阵之间加装减隔振段,减少海面的外界干扰对水下设备的干扰。噪声测量浮标系统由船基显控单元、浮标和垂直阵组成,见图1所示。
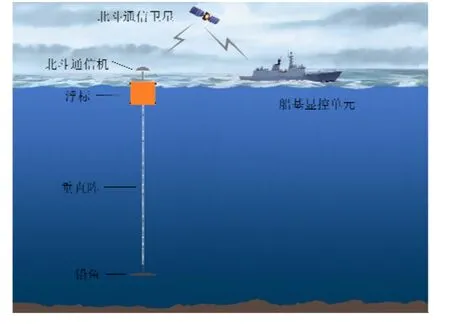
图1 漂浮布放浮标系统海上工作示意图
船基显控单元包括北斗通信模块固定站和浮标显示与控制终端,浮标中包括北斗通信模块移动站、电源管理模块、桥接模块、原子钟模块和存储模块,垂直阵包括水听器及前放模块、水听器数据采集传输模块、温深传感器和数据采集传输模块。见图2所示。

图2 噪声测量浮标系统框图
2.1 水下垂直阵设计
垂直阵内由四路接收水听器、两路温度传感器、两路深度传感器以及采集传输模块组成。水听器接收到的海洋环境噪声通过低噪声前置放大电路进行放大,以差分信号的形式传递给水听器采集传输节点。传输节点接收来自电子舱的采集同步时钟信号,单个节点以24位精度40 kHz的采样率对四路水听器信号进行数字化转换。垂直阵中所有的采集传输节点均采用相同的同步时钟信号进行数据采集,阵内部的 32路水听器信号都是同步采集并实时传输给电子舱进行存储。水下垂直阵中水听器信号同步采集传输通道结构框图如图3所示。
四路水听器数据在垂直阵中进行过低噪声前置放大和数字化处理,数字信号传输避免了长距离传输过程中被外界信号干扰,并且使用低功耗数字信号中继模块,理论上可以将水听器信号传输无限远,实际工作中受到供电原因和实际需求等因素的影响,最末端水听器远离浮标电子舱距离不小于300 m。

图3 水听器信号采集传输结构框图
2.2 浮标电子舱设计
浮标电子舱内部框图见图 4,主要包括电池组和电子功能模块两部分。电池组采用一号干电池通过串并联组合成输出电压36 V的电池组,提供噪声测量浮标连续工作不小于120 h的电量。电池组给两套电源模块供电:常开电源和程控电源。常开电源模块输出提供系统值班控制电路和原子钟模块供电;程控电源采用动态电源管理技术,对系统各个功能模块进行动态的电源管理,降低整机功耗,提高系统整体对电池组电量的合理利用,延长系统的整机工作时间。值班控制电路在浮标系统整个工作周期都处于工作状态,原子钟模块在浮标系统下水前将与GPS系统进行对时,一旦模块内部的自守时时间和GPS标准时间校准完毕,模块将依靠内部的原子钟补偿系统进行自守时,时间的保持能力小于1 ms(24 h连续测试,常温条件)。自守时时钟相关内容参考文献[4]。

图4 浮标电子舱内部框图
3 海试数据分析
2016年底,在南海某海域对浮标系统进行了背景噪声测量实验,关闭测量船上的所有发动机,降低测量船本身对海洋环境背景噪声的影响,时间30 min。完成试验后,对浮标系统进行回收,并通过专用调试电缆将浮标电子舱中的数据导入计算机。按照试验阶段记录的时间点,将采集的背景噪声原始数据进行处理,选取垂直阵中间阵段,水听器序号为:13~16。四个水听器在海面以下水深100~150 m均匀分布,时间上选取浮标测量海洋环境背景噪声时段的数据,对该数据进行功率谱计算处理,其功率谱图如图5所示。在几个特征点(500 Hz,1 kHz,2 kHz,4 kHz,8 kHz),谱级数据与参考文献[5]中海面风速3.0 m/s、海面以下61 m处的海洋背景噪声级进行比对,详细参数见表 1,基本与历史数据相吻合。

图5 垂直阵中间阵段四路海洋环境背景噪声信号功率谱图
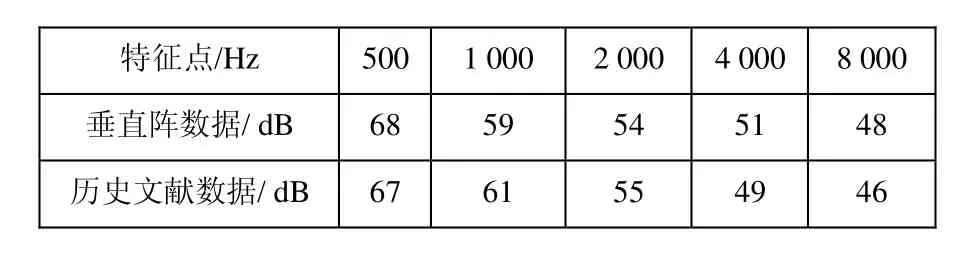
表1 垂直阵测得环境噪声数据与历史文件数据对比
低频段(低于200 Hz)海洋环境背景噪声功率谱相差较大,并且随着水听器深度变浅,噪声谱级增加,结合试验过程中的海况条件,冬季风时期南海冷涌强烈,浮标标体与垂直阵段之间减振效果有限,低频噪声对海域表层的影响会更加明显,四路水听器接收噪声谱级靠近标体的水听器谱级较高,远离标体的谱级较低。在海洋背景噪声测量过程中,海面波浪对标体的冲击,对垂直阵低频影响较大,需要对连接处进行改进设计,增强减隔振的隔振效果。
水下垂直阵中2路温度传感器和2路深度传感器数据处理结果如图6所示,海水温度随水深增加而变低,数据采集正常。垂直阵在布放过程中,同时使用光纤抛弃式测温探头对布放海域进行温深数据的测量,连续测量4次数据,比对结果见表2,测得结果如图7所示。试验数据表明垂直阵测得的温深数据与随船XBT设备测得实验数据相吻合。

表2 数据比对

图6 垂直阵中四路温度传感器、两路深度传感器数据

图7 试验船随船XBT测量结果
4 结论
本文对海洋环境噪声测量浮标系统的总体框架进行介绍和原理分析,重点介绍了浮标系统中采用的关键技术,并使用该套浮标系统在南海海域进行了海上验证试验。采用浮标的布放方式,垂直阵中水听器信号同步采样传输技术保证了噪声信号无失真地长距离传输;浮标电子舱中采用动态电源管理技术有效降低系统整机功耗,全功能系统工作功耗低于29 W,延长了系统在海上的工作时间;垂直阵中的数据传输至浮标电子舱集中存储,方便使用过程中数据的收集和后处理。整套浮标测量系统在海上布放过程中还存在不足:浮标标体与垂直阵之间需改进减隔振的设计,降低海面浮标对水下水听器的影响;布放回收过程复杂。后期仍然需要在海上试验过程中总结经验改进系统设计。
[1]黄益旺, 杨士峩. 海洋环境噪声的一般模型及声压空间相关系数[J]. 声学技术, 2007, 26(5):1004-1005.
[2]吕云飞. 基于潜标的海洋环境噪声测量系统[J]. 高技术通讯, 2009, 19(7): 760-763.
[3]徐功慧. 海洋环境噪声观测技术及数据处理方法[J]. 海洋技术, 2011,30(2):70-71.
[4]黄翔. GPS同步时钟的高精度守时方案[J]. 电力系统自动化, 2010, 34(18):15-17.
[5]林建恒. 海洋环境噪声垂直分布测试和分析[J]. 海洋学报, 2005, 27(3):32-38.
猜你喜欢
家教世界(2023年4期)2023-03-04
垂钓(2022年3期)2022-05-14
电声技术(2022年3期)2022-04-28
舰船电子工程(2021年5期)2021-06-04
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
应用科技(2020年1期)2020-06-18
垂钓(2019年2期)2019-09-10
电子制作(2018年23期)2018-12-26
测控技术(2018年11期)2018-12-07
海洋科学进展(2016年3期)2016-08-12