
嫦娥三号软着陆轨道设计与控制策略问题
2018-04-24 05:56孙丽萍杨景超刘士龙赵静王枭婷
新型工业化 2018年12期
孙丽萍,杨景超,刘士龙,赵静,王枭婷
(1. 河北交通职业技术学院电气与信息工程系,河北 石家庄 050091;2. 河北中医学院, 河北 石家庄 050200)
0 引言
嫦娥三号着陆器实现了我国首次地外天体软着陆任务,着陆器的制导、导航与控制系统是最重要的分系统之一。嫦娥三号在着陆准备轨道上的运行质量为2.4 t,其安装在下部的主减速发动机能够产生1500 N 到7500 N 的可调节推力,其比冲(即单位质量的推进剂产生的推力)为2940 m/s,可以满足调整速度的控制要求。嫦娥三号以(19.51 W,44.12 N,-2641 m)为预定着陆点,探测器从环月圆轨道变到软着陆准备轨道的变轨点为远月点,远月点距月球100 公里。近月点距月球15 公里,是探测器软着陆过程的起始点;着陆轨道为从近月点至着陆点,其软着陆过程共分为6 个阶段[1-3]。嫦娥三号着陆轨道如图1 所示。
为了保证登月探测器着陆的高安全性,其着陆过程的每个步骤都有很高的要求,对其着陆轨迹及着陆器的控制策略的研究对于探测器的探测任务完成及航天技术水平的提升有着重要意义[4-5]。本文研究了嫦娥三号软着陆过程的轨道设计和控制方案,本文假设:嫦娥三号所带燃料是充分足够的,不考虑空间飞行器上各点因燃料消耗而产生的位移,在对卫星和空间飞行器进行轨道估计时,认为作用于其上的所有外力都通过其质心,卫星只受重力影响,空间飞行器除自身推力外只受重力影响,忽略地球及其他星体的摄动影响。然后根据现有数据计算着陆轨道近、远月点的坐标和速度,从而制定嫦娥三号的着陆轨道,并设计最优控制方案,最后对设计的方案和模型做误差和敏感性等方面的评价与分析。

图1 嫦娥三号着陆步骤图例 Fig. 1 Legend of landing steps of Chang'e III
1 嫦娥三号近月点和远月点位置和速度的求解
探测器运动轨迹是在一个球坐标系里的三维运动,直接分析运动过程太过冗杂,故采用简化模型的方法对简化后的模型进行操作。假设月球的经线圈与建立的坐标系在同一平面,并且近月点远月点以及月心和着陆点组成的平面也与经线圈在同一平面内,这样可以保持经度的大小,简化为只需求出纬度的变化。由于模型简单跟实际过程相比误差较大,在其着地过程中加入了推力冲量的作用,使空间飞行器在推力和月球引力的作用下保持加速度不变的抛物线运动,建立平衡方程。在此运用万有引力定律和开普勒第二定律分别对远月点、近月点的速度求解。由此建立动力学模型,如图2,A 点为着陆准备轨道的近月点,B 点为着陆准备轨道的远月点,R 为月球的平均半径:R= 1737.013km , G=6.67*10-11N*m2/kg2, M月= 7.3477 × 1022kg 。
首先求出近远月点的检验速度:
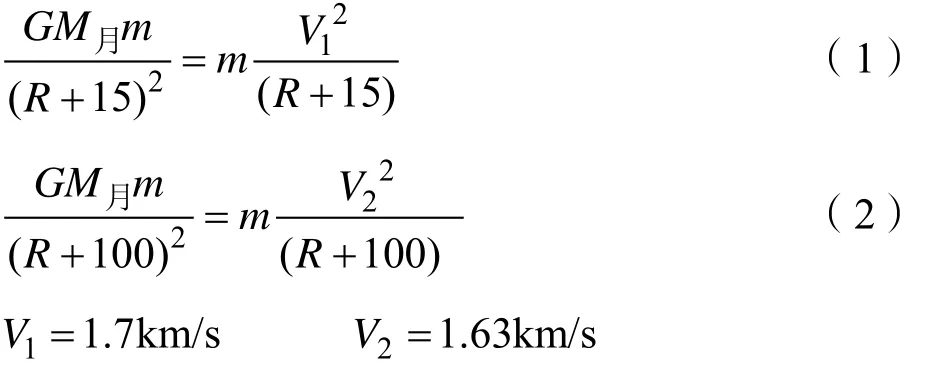

图2 简化的平面轨迹图 Fig. 2 Simplified plane trajectory
对由近月点降落到落地点的曲线进行求解,再根据弧线的长度求出θ 角的大小进而确定变化后的纬度。

解得 g月=1.62m/s2。建立最简单的模型:将该弧线的运动过程看作一个竖直方向的自由落体,水平方向的匀减速直线运动。求解出l=106013.626m,θ =3.5°。

但是这种模型误差太大无法精确地来描述纬度的变化,所以我们在这个模型的基础上进行改进,引入推力的冲量这一物理量,根据冲量等于动量之差并且使嫦娥三号在这个着陆轨道上月球引力和推力共同作用的合力大小方向是一定的,求出V1= 1.6922 e + 03m/s , V11= 1.6139 e+ 03m/s , F= 5127.3N, T =457.3721s,θ = 12.93110。近月点位置:57.0511N,19.51W 距月心距离为1752km;远月点位置:57.0511S,160.49E 距月心距离为1837km。
2 嫦娥三号着陆轨道和6 个阶段的最优控制策略
(1)主减速段
主减速段主要用于减速制动,其主要从高度(距参考月面) 约15km(约1.6922 km/s)~约3 km(约 57 m/s)。该阶段是软着陆过程中消耗的推进剂最多,且耗时也最长。因此此阶段的主要目标是推进剂消耗优化。

图3 月球软着陆极坐标系 Fig. 3 Lunar soft landing polar coordinate
针对基于最省燃料的月球软着陆轨迹优化问题。根据如图3 所示的示意图,建立基于动力学方程的数学模型:
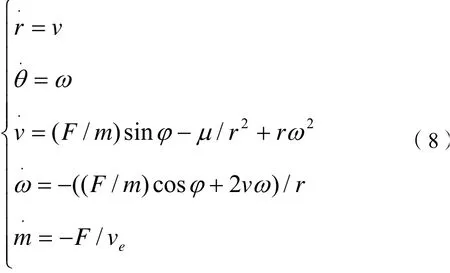
其初始条件为:
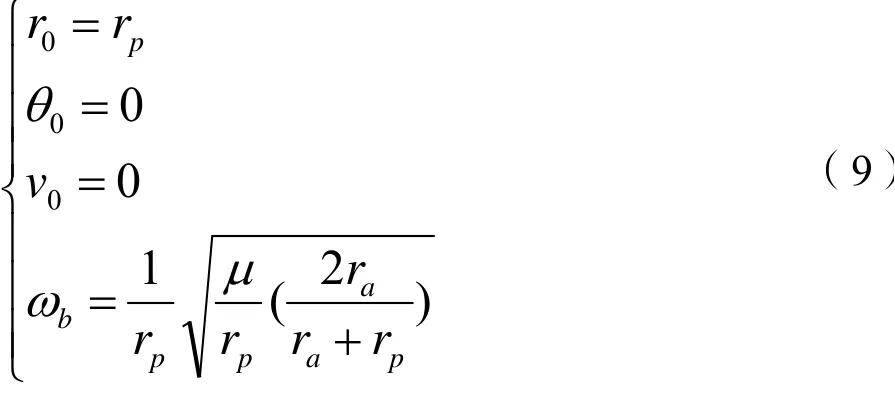
在上式中r,v,θ,ω 分别为着陆器与月心距离,径向速度,极角,极角角速度。μ 为月球引力常数,F,m,φ ,ev 分别为制动发动机推力,陆器质量,推力方向角,比冲。pr 和ar 为近、远地点半径。优化目标为着陆过程中燃料消耗最少:

本文采用直接法进行轨迹优化,采用函数逼近法进行参数化。利用增加了局部搜索策略的十进制蚁群算法对该优化问题进行研究,用到了蚁群算法中的十进制蚁群算法、路径转移规则和信息素更新规则等,局部搜索策略,用于多元连续函数的十进制蚁群算法。求解知消耗燃料1.05t,消所耗时间495s。在接下来的优化控制策略,因为燃料损耗不是太大,不将燃料最小看做优化策略,假设燃料不再改变。
(2)快速调整阶段
主减速结束后到离月面2.4km(水平速度0m/s)。由主减速阶段计算出3km 时的速度方向基本垂直,为优化使调整时间最小,使得推力最大。


(3)粗避障段
粗避障段是离月面2.4km 到100m 时为了避开大的陨石坑,规划初步落月点。
在2.4km 处对正下方月面2300×2300m 的范围进行拍照,为避开大的陨石坑,并嫦娥三号在月面的垂直投影位于预定着陆区域的中心位置。
以图4 所示的着陆拍摄到的图像为例,首先将尺寸为2300*2300 的图4 中较大的“坑”在原图片中抹去,然后将附件3 分割成100*100 个23*23 的区域。求每个区域的方差,方差最小的区域即为相对最平稳的区域。
求出最平稳区域为图中点(425.5,1943.5),着陆器与目标地点的投影距离为1074m,偏角为25°。

图4 粗避障段飞行目标图 Fig. 4 Flight target in obstacle avoidance section
实现粗避障轨迹最优化,运动轨迹方向应沿初状态点与目标点连线方向,则推力加速度大小Fa和月球引力加速度大小g月计算如下:

α 为推力方向与引力方向的夹角,本文β 取65°,α 取9°。
则合加速度在径向和航向的分量分别为:

如果保持径向和航向的加速度不变,则可确定下降高度和航程为:

式中, xfv 和xov 分别为接近段终端的径向和航向速度, zfv 和zov 分别为接近段入口的径向和航向速度。
于是,标称的接近段时间为

求解得到时间为125s。 (4)悬停阶段
悬停阶段时着陆器重力由变推力发动机平衡,且此时着陆器是悬停状态,其速度为0。通过对此目标进行动力学求解,可求解得到时间为15s。
(5)精避阶段
在距月面100m 处,对其附近区域100m 范围拍照。首先将尺寸为1000*1000 的如图5 所示的图像中较大的“坑”在原图片中抹去,然后将图5 分割成50*150 个20*20 的区域。求每个区域的方差,方差最小的区域即为相对最平稳的区域。
求出最平稳区域为图中点(690,630),着陆器与目标地点的投影距离为23m,偏角为18.21°。

图5 精避障段飞行目标图 Fig. 5 Flight target map of eliminating obstacles
安全着陆点为着陆点上方约30 m 处,相对月面下降速度为1.5 m/s,终端水平速度为0。根据主发动机最小推力(minF 考虑一定余量)计算着陆器能实现的最大下降加速度 max da 。从100m 到30m 的垂直方向的角度。

mass 为着陆器质量。如果加速和减速两段的加速度大小相等(即2a =1a ), 则可得到如下关系:

由此可解得最大下降速度mv ,于是加速度大小可得到

如果 a>maxda ,则取1a =maxda ,则可解算出

否则,取1a =a,2a =a。根据加速和减速2 段的加速度取值,确定最大下降速度:

进而可以确定上下 2 段的切换时间

由此可求出加速和减速两段分别花费的时间的时间为14 和11s,总时间为25s。
(6)缓速下降阶段
缓速下降对在高度 30 m 以上垂直方向,以及高度30 m 一下进行控制优化。此阶段求解得到的时间为20s。整个软着陆过程共耗时678 秒,消耗燃料大约1.05t。
3 结论
模型的优点:
(1)本文研究了嫦娥三号软着陆中各个阶段的最优轨迹及其控制方案。通过改进的函数逼近法,把轨迹优化转化为参数优化的问题。基于改进的基本蚁群算法,并引入增加局部搜索策略,提高算法的精度和收敛速度。并将优化策略应用于整个控制方案的优化中。
(2)在软着陆的不同阶段,采用不同的优化标准,从而得到整体优化,也有效地减少了计算量。
模型的不足:在快速调整段,直接将速度视为垂直向下,但在实际运动时,有水平方向的速度。
模型的改进:
本文采用的是二维坐标系,模型适应于求非定点软着陆。定点着陆应该考虑天体自转在三维坐标系下建模,利用惯性系下三维定点软着陆问题建模。首先在惯性坐标系下考虑月球自传运动,基于轨道交会思想,确定新的运动轨迹。其次,着陆器水平速度的方向允许在与垂直速度垂直的平面内转动,则整个软着陆过程中,着陆器的合速度方向就会在空间中发生改变,运动轨迹也会变成一个三维轨道,更为接近实际。
猜你喜欢
学与玩(2022年6期)2022-10-28
军事文摘(2022年12期)2022-07-13
飞碟探索(2022年1期)2022-03-12
军事文摘(2021年18期)2021-12-02
航天器工程(2019年4期)2019-11-11
伙伴(2019年12期)2019-01-17
北京航空航天大学学报(2017年4期)2017-11-23
中学科技(2015年7期)2015-07-03
太空探索(2014年2期)2014-07-12
太空探索(2014年1期)2014-07-10
