
沪通长江大桥钢桁梁拼装测量技术探讨
2018-05-14 08:37蔡少云李桂华
现代测绘 2018年2期
蔡少云,李桂华
(1.中交第二航务工程局有限公司沪通长江大桥项目部,江苏 南通 226361; 2.河海大学地球科学与工程学院,江苏 南京 210098)
0 引 言
沪通长江大桥为我国最大跨径的公路铁路两用桥,位于苏通长江大桥上游44 km,北连南通,南贯张家港,桥位处江面宽约6 km,桥区两岸地势平坦,视野开阔。跨横港沙区段桥梁为21孔112 m简支钢桁梁桥,全长2 352 m。主梁采用带竖杆的华伦式三片主桁架结构,主桁中心横桥向间距2×14.5 m =29.0 m,中桁中心桁高16 m,每跨纵桥向分10个节间,中间节间长11 m,端部节间长10.8 m。跨天生港航道桥梁为141.5 m+336.0 m+141.8 m=619.3 m刚性梁柔性拱桥,主梁采用带竖杆的华伦式三片主桁架结构,主桁中心横桥向间距2×17.25 m=34.5 m,中桁中心桁高16 m,纵桥向节间距为14 m,全桥共44个节间。
沪通长江大桥是四线铁路和六车道高速公路合建桥梁,主要技术标准为:① 钢梁制造标准采用《铁路钢桥制造规范》(TB 10212-2009);② 质量验收采用《高速铁路桥涵工程施工质量验收标准》(TB 10752-2010);③ 测量采用《高速铁路工程测量规范》(TB 10601-2009)。
1 施工测量控制网
1.1 施工控制网坐标系建立
沪通长江大桥施工平面坐标系统为CGCS2000国家坐标,中央子午线120°45′,投影面大地高20 m;高程为1985国家高程基准。
为方便施工,在112 m简支钢桁梁桥和336 m钢拱桥上分别建立桥轴坐标系[1]。因336 m钢拱桥全长619.3 m,桥面平均大地高65 m,按照控制网投影面大地高20 m计算,长度变形约5 mm,不利于钢桁梁拼装。为了减小投影差改正,在施工336 m钢拱桥时,需将控制网投影面放在大地高65 m处,进行投影面改化。而112 m简支钢桁梁桥控制网投影面长度变形<1 mm,无需进行控制网投影面改化。
坐标转换采用四参数公式[2]。为避免缩放量集中在桥梁一端,CGCS2000坐标与桥轴坐标之间的尺度缩放应相对于桥梁测区中心缩放:

(1)
式(1)中,x1,y1为CGCS2000坐标相对于桥梁测区中心的坐标增量;β为旋转角;λ是缩放因子;a,b为坐标平移量;x2,y2为桥轴坐标。
1.2 施工测量控制网布设
平面控制网测量采用GNSS静态相对定位技术[2](按铁路一等GPS要求施测)结合常规导线测量技术方法。高程控制网测量采用EDM对向三角高程[3]及几何水准测量技术,按二等水准要求进行。
钢桁梁拼装阶段,施工控制网分两次布设(图1):① 第一次布设10个平高控制点,均匀分布于线路东侧,主要用于112 m钢桁梁的拼装测量;② 第二次布设2个平高控制点,位于336 m钢拱桥铁路层顶面,主要用于336 m钢拱桥的钢桁梁拼装测量。为提高测量精度,所有点均为强制对中观测墩结构。
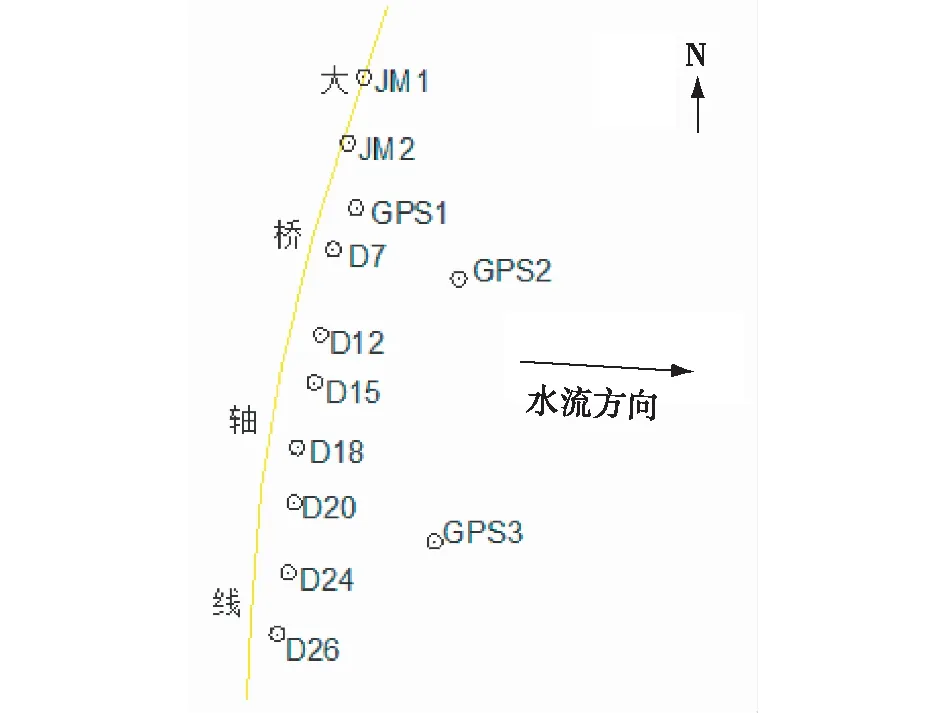
图1 施工测量控制网点位布置图
1.3 复杂施工条件下GNSS基线解算
基线解算采用徕卡LGO 8.4和GAMIT 10.6软件[4],网平差采用武汉大学研制的 “CosaGPS-GPS工程测量网通用平差软件包(V5.20)”。
大桥线路上的桥梁工程测量工作基点一般布设于线路两侧,少数点受施工条件限制,布设靠近桥梁主体结构。如本工程的GPS1点,靠近墩身,GNSS信号遮挡严重,用随机解算软件LGO 8.4做基线数据处理较为困难。而利用GAMIT 10.6软件可用卫星多、自动修复周跳等特点,基线处理可获得最优结果。处理时,使用者要根据需要设置卫星系统、采样率、电离层模型、对流层模型等解算策略。
2 工厂制造精度管理
工厂制造精度(规范要求杆件各栓孔间距制造偏差不大于0.8 mm)直接影响钢桁梁桥位拼装的顺利程度。沪通大桥钢桁梁由3家厂家制造,地域、季节、工艺均不相同。针对以上特点,需采取3种措施,确保精度符合拼装要求:① 明确钢桁梁杆件制造基准温度为20℃;② 对3家厂家所用钢尺统一比对标定;③ 采用全站仪三维坐标法(TS30全站仪配合球棱镜,精度优于0.4 mm)定期检测钢桁梁孔群相对位置及节点板平面度。
3 高墩变形影响及应对措施
沪通长江大桥墩身高大,高度53~63 m,钢桁梁桥位拼装施工以墩身为依托,因此必须考虑墩身变形对钢桁梁精确定位的影响。造成墩身变形主要因素包括:① 温度、风等外界条件;② 上部结构不均衡施工荷载。为此,通过观测对其进行定量分析,用以指导施工测量。
3.1 均衡荷载下的墩顶变形观测
均衡荷载下的墩顶变形受墩身结构、温度、风等外界条件影响。观测时,选择标段内墩身高度最高的正桥25#墩为观测对象,设置TS30全站仪于相邻墩承台顶面,在25#墩承台和墩顶设置固定棱镜,采用全站仪差分法[1]进行墩顶变形观测(图2)。
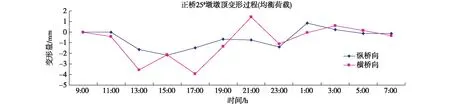
图2 墩顶变形过程图
3.2 不均衡荷载下墩顶变形观测
根据上部结构施工实际情况分析,墩身在纵桥向受不均衡施工荷载影响。观测时,沿桥轴线布设观测点,设置TS30全站仪于相邻墩承台顶面,在墩顶设置固定棱镜,选择温度恒定的时间段,采用距离差分法进行墩顶纵向变形观测。
根据实测数据,墩顶受温度等外界环境条件影响最大变形为3.8 mm,受不均衡施工荷载影响最大变形为6.8 mm。考虑高墩变形复杂性,本工程采取避让墩顶水平变形、修正墩顶竖向变形的应对措施,即在墩身温度恒定、施工荷载平衡时,将钢桁梁拼装的测量基准引测至墩身顶面(墩顶高程均进行温度基准改正)。
4 TS30全站仪三维坐标法测量
考虑施工条件,沪通桥钢桁梁每一根杆件都在工厂制造,桥位处采用75 t吊机逐件拼装,桥位连接方式为高强度螺栓连接(图3)。
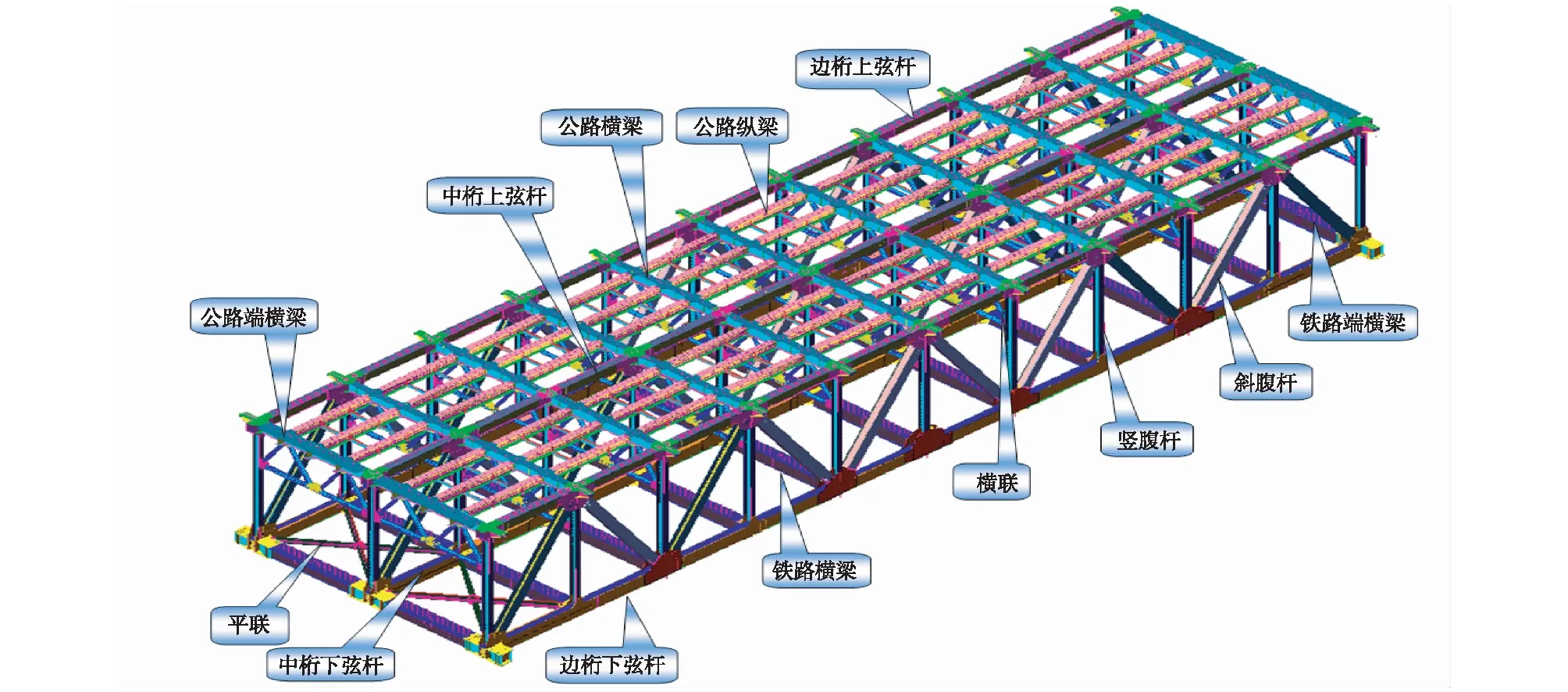
图3 桁架结构布置图
钢桁梁各杆件间的空间几何距离在制造厂家已严格控制(≤0.8 mm),整体空间姿态在制造厂家已基本确定。桥位处钢桁梁拼装测量工作主要有对首节间钢桁梁绝对位置定位和在拼装过程中对钢桁梁监控两方面,以微调钢桁梁的空间姿态。
钢桁梁拼装主要测量精度指标为:平面点点位中误差±3.0 mm,相邻点相对点位中误差±1.5 mm;高程点点位中误差±3.0 mm,相邻点高差中误差±0.6 mm。
4.1 TS30全站仪三维坐标法测量精度分析及应对措施
根据实际情况,钢桁梁拼装测量选用TS30全站仪三维坐标法[5-7],即用TS30全站仪在工作基点上直接测得待定点三维坐标的方法。TS30全站仪具有轴系自动补偿、自动照准、自动进行大气折光系数改正等功能,仪器主要精度指标为测角0.5",测距0.6 mm+D·10-6m。经分析,主要测量误差来源有仪器自身精度、仪器设站对中误差、镜站置镜误差及钢梁变形、颤动等所产生的误差。
4.1.1 TS30仪器自身精度
施工测量时,现场无多余观测条件,控制放样视线长度不超过100 m,根据点位精度估算公式,可得一测回平面点点位中误差为±0.7 mm,高程中误差为±0.2 mm。
4.1.2 仪器设站对中误差
工作基点均做成强制对中观测墩[1]结构,可确保仪器设站对中误差不超过±0.2 mm,仪器高用解析法[6]测定,量高中误差±0.2 mm。在条件允许情况下,全站仪自由设站法也是较好的选择。
4.1.3 镜站置镜误差
棱镜杆圆水准管气泡精度为8′,采用镜高为0.1 m的棱镜测量,对点中误差±0.3 mm,量高中误差±0.2 mm。
4.1.4 钢梁变形、颤动影响
钢桁梁大悬臂拼装受日照、温度、风等外界环境条件的影响较大,此部分误差量级较大且不易量化。因此,应尽量选择钢桁梁梁体内外温差不大于2 ℃的时间段进行测量,以消弱温度引起的钢梁变形;采用多棱镜测量,以减少钢梁颤动引起钢梁变位误差;再采用多测回观测,以消除钢梁颤动对仪器测量精度的影响。
根据上述分析,按照误差传播定律,算得TS30全站仪三维坐标法测量精度为平面点位中误差±0.9 mm,高程点位中误差±0.4 mm,满足要求。
5 首节间钢桁梁拼装测量
336 m钢拱桥首节间钢桁梁采用浮吊安装。安装前,先建立测量工作基点,具体如下:① 在墩顶上下游各建立一个强制对中测量观测墩;② 观测选择在日落后4 h,观测数据分2个晚上采集完成;③ 平面数据观测按照四等附合导线技术要求进行,高程数据观测采用对向EDM三角高程按照二等跨江水准要求进行;④ 观测时用点温计测量气温和墩身表面温度(在墩顶和墩底2个断面采集),用于高程的温度基准改化。
钢桁梁拼装测量采用TS30全站仪三维坐标法直接测出测量标示点的三维坐标,与其相应工况下的理论坐标值相比较,判断钢桁梁架设姿态是否符合要求(图4)。

图4 照准用棱镜
6 结 语
(1)沪通长江大桥跨江主桥上部结构全部采用钢桁梁结构,桥位钢桁梁拼装是其关键:① 通过对控制网的改造(将坐标投影面改化到桥面),能更好适应高精度的钢桁梁空间三维姿态测量;② 通过使用高精度基线解算软件,顺利处理了GNSS困难数据;③ 通过对高大墩身变形、全站仪三维坐标法测量精度定量分析,选择合理观测时间,采取正确的观测方法;④ 通过对钢桁梁制造厂家的精度管理,保证钢桁梁制造精度;⑤ 通过专用棱镜制作,确保钢桁梁的测量定位精度。
(2)目前,沪通长江大桥钢桁梁拼装工程已结束,梁体轴线偏差均不大于10 mm,墩顶节段标高偏差均不大于5 mm,拱度、奇偶连线偏差等各项技术指标均满足《高速铁路桥涵工程施工质量验收标准》(TB 10752-2010)要求。实践证明,沪通长江大桥钢桁梁拼装测量技术合理可行。
[1] 陈光保,魏浩翰,黄腾.南京长江三桥钢索塔施工测量技术[J].公路交通科技,2008,25(9):73-80.
[2] 李征航,黄劲松. GPS测量与数据处理[M].武汉:武汉大学出版社,2005.
[3] 蒋辉,赵仲荣,章书寿.苏通大桥跨江EDM三角高程测量精度的研究[J].现代测绘,2004,27(6):9-11.
[4] 葛义强,冯宝红.GAMIT软件在高速铁路GPS控制网中的应用[J].现代测绘,2014,37(2):25-28.
[5] 潘威.EDM三角高程测量误差分析[J].交通标准化,2006(9):93-95.
[6] 王国栋.不量仪器高、棱镜高的三角高程测量技术在应用中的注意事项及改进措施[J].科技传播,2011(10):93,88.
[7] 李浩,车国泉.大气折光在三角高程测量中的反算及精度分析[J].贵州水力发电,2010(1):21-22.
猜你喜欢
城市道桥与防洪(2022年1期)2022-02-25
山西交通科技(2021年3期)2021-07-14
施工技术(中英文)(2021年5期)2021-04-30
山东交通科技(2021年6期)2021-03-01
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
山西建筑(2020年5期)2020-03-20
铁道标准设计(2018年12期)2018-11-22
中国港湾建设(2017年11期)2017-12-19
中国公路(2017年7期)2017-07-24
