
诊断和解决运营IP视频网络中的问题
2018-06-21 17:50张炳
传播与制作 2018年5期
张炳
引言
在制作应用和其他运营应用中部署IP视频网络,需要能够使用市面上商用的(COTS)基于IT的基础设施,其中利用了IT行业的规模经济优势,因为广播行业的规模相对较小。其他优势还包括:降低了布线成本和重量,路由灵活度大大提高,因为在世界上许多地方,IP视频试用、概念验证及早期部署都已经到位。虽然有这么多优势,但与此同时,IP也带来了许多技术挑战,如抖动、时延、丢包风险、本身同步缺失及不对称,导致上行路径和下行路径有不同的延迟。另外,IP是一套复杂的双向协议,要求在部署前同时了解信源和信宿。另一个问题是在视频制作应用中部署IP时,视频工程和网络工程两个世界真正交汇在一起。视频工程师已经习惯了使用SDI、同轴电缆、配线板、黑突发和三电平时序及信号质量。视频工程师的挑战是了解IT技术及IT基础设施对视频的影响。而网络工程师则熟悉IP流量、协议、网络业务、路由器配置及精密时间协议(PTP)和网络时间协议(NTP)等定时协议。最大的差异是在大多数数据中心应用中,丢失的数据可以重发,而在高位速率视频中则不能重发。网络工程师的挑战是了解视频技术及其对IT基础设施的影响。很明显,视频工程师和网络工程师需要双方都能用的诊断监测和分析工具。
IP网络中会发生什么问题?
导致I P网络问题的许多问题都可以追溯到包抖动。正如下一節中介绍的那样,包抖动过高会导致缓冲器溢出和下溢,导致丢包和数据流量停顿。可能会出现的其他问题与时延和PTP包流量不对称有关。在SDI和IP混合工作流程中,还必需保证SDI和IP视频之间的关系是一致的,以无缝实现画面准确切换。这可以通过测量黑突发/三电平同步与PTP时钟之间的关系,然后通过相对于PTP时钟偏移SDI同步,进行任何必要的校正来实现。
什么导致了IP包抖动?
在任何数字系统中,抖动都是较信号周期性的偏差或位移。在承载恒定位速率数据的IP网络中,抖动是距接收机上包到达间隔周期的偏差,排队或配置不当都会引起抖动,假设路由器和交换机都配置且运行正确,那么最常见的抖动根源是路由器/交换机接口上的网络拥塞。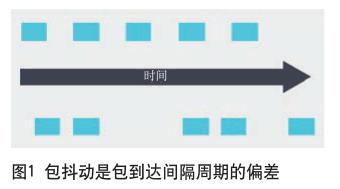
由于异步特点,任何IP网络本身都有一定程度的抖动。很明显,网元内部的应用可能要求以不忙的方式接收数据,结果,接收设备采用去抖动缓冲器。然后应用从这个缓冲器的输出中接收数据包,而不是直接接收,数据包以定期速率流出缓冲器,使流入缓冲器的数据包的定时变化变得平滑。
抖动过高有什么影响?
在上一节中,我们看到数据包以稳定的速率流出接收机的缓冲器,这称为缓冲器的“流失率”。相反,缓冲器接收数据的速率称为“填充率”。选择缓冲器的大小同样非常重要,如果缓冲器太小,那么如果流失率超过填充率,那么缓冲器可能会太小而下溢,导致包流动停顿。如果接收速率超过流失速率,那么在某个点上缓冲器将溢出,导致丢包。但是,如果缓冲器太大,那么网元将引入时延过高。如上图所示,网络抖动会导致包变得非周期化,因此缓冲器填充速率不再恒定。随着抖动变得越来越大,非周期性也变得越来越大。在某个点上,这种非周期性会导致缓冲器的填充率和流失率变得非常不均衡,以致缓冲器要么下溢导致流量停顿,要么溢出导致丢包。
在高位速率视频中,缓冲器下溢或缓冲器溢出都可能会导致视频损伤。应该指出,当然超额定购也会导致丢包。
测量实时协议(RTP)网络中的抖动
我们已经看到,在承载恒定位速率数据的网络中,抖动是距接收机周期性的偏差,如果接收机中的时钟是精确的,那么只需通过测量包到达时间的时间标记,绘制到达间隔相对于时间的关系,那么就可以测量抖动。这种方法用来识别抖动随时间变化,另外也可以绘制到达间隔随发生频次变化情况,也就是直方图。我们已经看到,如果抖动值太大,导致到达的包超出了去抖动缓冲器的范围,那么超出范围的包会被丢弃。能够识别极端值有助于识别网络抖动性能可能成为、还是已经成为丢包的原因。
这种方法用来识别抖动随时间变化,另外也可以绘制到达间隔随发生频次变化情况,也就是直方图。我们已经看到,如果抖动值太大,导致到达的包超出了去抖动缓冲器的范围,那么超出范围的包会被丢弃。能够识别极端值有助于识别网络抖动性能可能成为、还是已经成为丢包的原因。在恒定高位数据速率下,如果抖动分布太宽,网络拥塞及网络抖动幅度可能会足够明显,而导致丢包。因此,如果抖动分布很窄(如上例中),且系统发生丢包,那么网络拥堵不可能会导致抖动。
可能有人认为可以使用这种分布指标,估算去掉业务流量抖动所需的缓冲器大小,但必需考虑的是,这没有考虑包到达间隔样点的排序。在本质上,到达间隔长的一串包不可避免地会导致对应的短到达间隔的突发包。正是这种突发的业务会导致缓冲器溢出和丢包。如果接收率在一定时间内超过流失率,且这个时间周期超过缓冲器剩下的容量(用微秒表示),那么就会发生这种情况。
在下述情况下,突发会导致缓冲器溢出:接收率>ΔT 的流失率>缓冲器剩下的时间容量
确定去抖动缓冲器大小
我们已经看到,在实际生活中,并不能通过单纯测量包到达间隔时间来预测必需的去抖动缓冲器大小。但还有一种抖动测量方式,称为延迟因数(DF),可以用来确定去抖动缓冲器大小。延迟因数是一种时间指标,在高位数据速率视频中用微秒表示,预测网络节点上虚拟缓冲器流完需要多长时间。在任何给定时间上,延迟因数表示该网络节点去除业务流量抖动所必需的时间缓冲器大小。
这种DF指标基于这样一个事实,即RTP承载着RFC3550规定的时间标记信息,反映了RTP数据包中第一个字节的采样时点(时间标记格式与NTP相同)。这个指标称为带时间标记的延迟因数或TS-DF,由EBUTech3337规定。这种方法用于公共领域,特别适合RTP承载的高位速率媒体应用。T S-D F的基础是把网络包的到达时间与RTP包头中的时间标记字段关联起来。

带时间标记的延迟因数指标基于R F C3550中规定的相对传送时间(RTP:实时应用传送协议),其定义为包的RTP时间标记(保留在RTP包头中)与到达时接收器的时钟之差,两者用相同单位表示。TS-DF测量周期是1秒。在这种算法中,测量周期开始时的第一个包被视为没有抖动,作为基准包使用。
对测量周期内到达的每个后续包,将计算这个包与基准包之间的相对传送时间,在测量周期结束时,提取最大值和最小值,然后通过下面的公式计算出带时间标记的延迟因数:
TS-DF=D(Max)-D(Min)
与RFC3550中的抖动算法不同,这种算法不使用平滑因数,因此会给出一个非常准确的瞬时结果。泰克SDI和IP混合媒体分析平台同时实现了IP包到达间隔抖动测量及RTP特定TS-DF测量。
确定根本原因
另一个考虑因素是确定视频损失的根本原因。必需要理解的是,如果出现损伤,不管根本原因是IP错误,还是其他问题,都会导致损伤。
通過把视频错误的时间标记与RTP错包的时间标记关联起来,可望确定错包是不是视频错误的根本原因。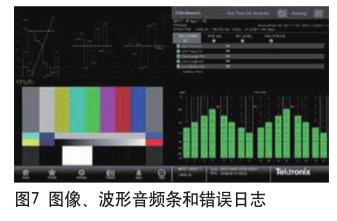
视频CRC错误本身并不能确认视频有损伤,除记录错误外,最好使用传统监测方式,如图像和波形显示及音频条,来保证监测信心。
什么是PTP?
基于I P的网络可以视为异步网络,因为分布在网络中各个节点上的设备时钟没有固有的系统时间概念。精密时间协议(PTP:由IEEE1588规定)旨在同步以太网络上不同节点的实时时钟。但应该指出,PTP并没有使网络本身同步(同步以太网则实现了同步,也称为SyncE)。其最新版本是IEEE1588-2008,也称为PTP第2版;SMPTE已经在PTP第2版基础上开发了一个标准,专门针对广播视频应用,称为SMPTE ST2059。
采用IP视频及使用PTP同步不同网络节点的实时时钟,意味着任何此类网络都要求一个网络时间服务器,以便提供与SDI网络中的同步脉冲发生器(SPG)同等的功能。同步的任何时钟逻辑组都称为PTP域。注意,一个域中的时钟可能并没有同步到另一个域中的时钟。
这种P T P网络时间服务器一般称为PTPGrandmaster(PTP大师),从PTP中推导出定时同步的设备称为PTPSlave(PTP从设备)。Master(主设备)在给定PTP域中提供时间,S l a v e(从设备)同步到 Master(主设备)。Grandmaster(大师)是在网络中提供终极时钟同步来源的设备。在广播应用中,PTPGrandmasters(PTP大师)通常同步到GPS、GLONASS 或同时同步到两者。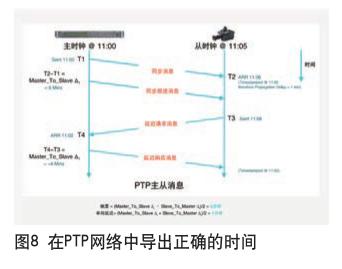
PTP网络中怎样导出时间?
由连接到单个主设备的从设备组成的网络称为一个域,在PTP域中,有大量的消息类型,用来在该网络内部确定时间。通知消息用来确定同步层级,提供时钟状态和时钟标准,用来确定哪个时钟成为大师设备。同步消息和跟进消息由大师传送,从设备使用这些消息推导时间。DelayRequest消息用来请求定时信息,自从设备发送到大师设备,以确定从设备和大师设备之间的反向路径传播延迟。DelayResponse消息由大师设备发送,其中包含着大师设备收到DelayRequest消息的时间。
根据定义,PTP是通过网络分发时间的一种方式,其中一个大师设备提供时间源,同步一个或多个从设备。大师设备定期传送同步消息和跟进消息,从设备使用这些消息导出时间。在理想情况中,网络延迟可以编程到每个从设备中,然后可以偏置收到的数据包中的时间,导出正确的时间。只有点到点链路才能依赖这种对称性。遗憾的是,交换式/路由式IP网络中的路径延迟在不同网络节点是变化的,也是不对称的。考虑到这一点,从设备必须定期向大师设备发送Delay Request消息。大师设备在收到时在这些消息上准确地打上时间标记,在DelayResponse消息中把接收时间发回从设备。以上图为例,从设备现在能够使用主从同步包延迟(T2-T1)及从主延迟请求包延迟(T4-T3)计算自己的时钟与大师设备之差。偏置(从时间-主时间)= [(T2-T1)-(T4-T3)]/2。为了使从时间绝对正确,两个方向的传播延迟必须相等。
最佳主时钟算法
PTP的基础组成部分是最佳主时钟算法(BMCA),这种算法在网络中所有时钟上运行。BMCA的目的是提供弹性,方式是在当前大师设备不能继续运行时允许最准确的时钟接管任务:
GPS失锁
从网络中断开
因任何其他原因而不能作为大师设备
选择哪个时钟作为大师由下面的BMCA标准确定,这些标准是按优先次序排列的:
1.优先权1字段(范围0-255,从设备通常设置为255,主设备使用<=128的最低值)
2.时钟类别(如GPS锁定或自由运行)
3.时钟精度
4.时钟方差(抖动和漂移)
5.优先权2字段(范围0-255,从设备通常设置为255,主设备使用≤128的最低值)
6.决定点是时钟源端口号(通常是以太网MAC地址)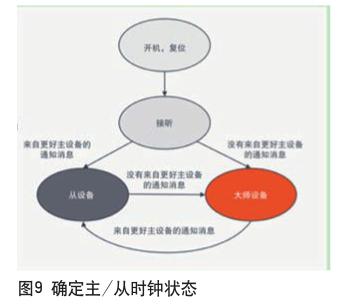
怎样才能保证备用设备在发生故障时接管任务?
为确保主设备和备用设备自动实现故障切换,可以使用PriorityTwo字段,识别两个或两个以上完全一样的冗余设备的主时钟和备用时钟,具体如下:
主设备 (PriorityOneField=128;P riorityTwoField=127)
备用设备 (PriorityOneField=128;PriorityTwoField=128)
如果两个完全一样的主设备锁定到GPS,它们将有相同的时钟质量,因此PriorityTwoField最低值将确定选择哪个作为大师设备。如果主时钟GPS失锁,那么备用时钟将成为较好的主设备,接管任务而成为大师设备。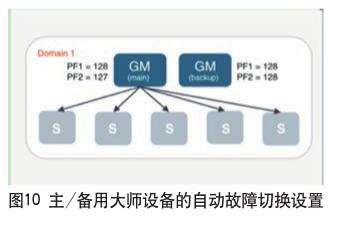
值得一提得是,如果任何同步GPS的主设备GPS失锁,那么它本身自然而然会变成自由运行,并依赖自己的内部本振。不管这个振荡器有多好,在延长的时间周期内它都会漂移,即使相对于GPS时钟漂移程度不大。一旦重新获得GPS锁定,除非主设备的本振锁相环(PLL)被慢慢驱动到与GPS时钟再同步,否则系统会在主设备的时钟频率突然变化时发生“同步震动”。尽管这在某些I T应用中是可以接受,但视频制作应用中则非常不愿意看到这种问题。在SPG8000A中,“Stay Genlock”功能通过认真控制PLL,来专门避免同步震动问题。
在实时视频制作应用中,视频处理要求非常高的时钟精度。大师设备(如SPG8000A)锁定到GPS(或GLONASS或两者以提供更高的星座弹性),其中大师设备的本振锁相到GPS基准。
相对于数据包的时间标记,最好在MAC和PHY层使用专用硬件方法,来避免基于软件的堆栈中的时延变化。
PTP测量和监测
在考虑准确的P T P性能时,应了解网络是否不对称性过高。也就是说,自主设备到从设备(M-S)的包延迟明显不同于自从设备到主设备(S-M)的包延迟。如果两个方向的传播延迟不同,那么从设备会进行偏置校正,即把其时钟调节到不对称度一半的值。时钟的控制环路调节从设备时间,使主从传播延迟和从主传播延迟看上去相等。如果不对称度过高,那么将不能准确补偿绝对时钟值的M-S或-SM包延迟。另外为了保证时钟准确性,交换机和路由器必需考虑自己的排队延迟,因此需要能够识别PTP。也就是说,它们可以作为透明时钟或边界时钟,这两种情况都考虑了自己的排队延迟,但方式不同。
边界时钟从大师设备接收PTP定时,在一个端口上作为从设备。它使用这个定时锁定内部时钟相位,然后设备作为PTP主设备,在输出端口上创建新的Sync和Announce消息。在这种方式下,边界时钟的排队延迟没有关系,因为在其离开设备时,PTP消息会加上新的时间标记。
在通过交换机传播时,透明模式下运行的交换机会测量PTP消息的传送时间,然后把该时间提供给其传送的PTP消息相關领域中的从设备。从设备使用这种相关性计算偏置和频率。由于计算结果中去掉了交换机中的延迟,因此从设备的定时不受交换机内部的排队延迟影响。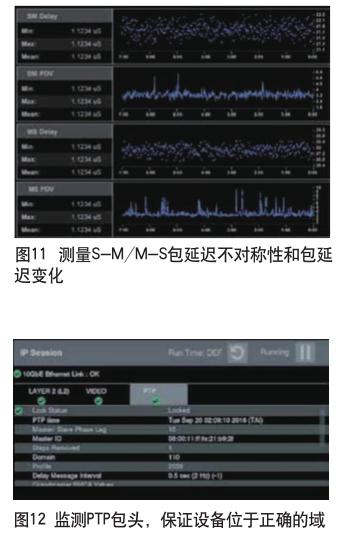
同一网络中的设备应位于相同的域,两者正确设置MCA优先等级至关重要,以确保选择最佳的主设备作为大师设备,在主大师设备发生故障切换时选择适当的备用主设备。
混合黑突发/三电平和PTP网络
在可以预见的未来,许多视频网络将结合使用SDI和IP。在这些情况下,为实现画面准确切换,BB/三电平的定时与PTP同步至关重要。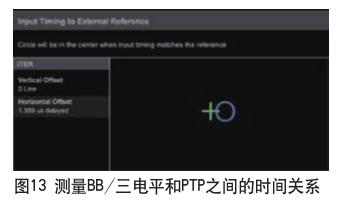
最后一个考虑因素
在实时制作应用中,网络专家不可能出现在制作现场,网络设备也不一定位于很容易接入的位置。
通过测量PTP与黑突发/三电平之间的定时关系,然后调节混合SPG/ PTP大师设备(如泰克SPG8000A)中的BB/三电平到PTP偏置,可以简便地实现这一目标。任何诊断设备最好都能远程控制。
小结
在视频工程和网络工程交汇的环境中,IP既给广播公司带来了机遇,也带来了挑战,提供视频工程师和网络工程师都能使用的诊断监测和分析工具至关重要。
必需监测测量期间的抖动性能,避免溢出及导致的丢包。带有时间标记的延迟因数是一个实用的指标,可以协助开通网络,迅速识别导致缓冲问题的抖动过高的情况。如果确实发生了网络问题,那么必需确定视频错误方面的影响,以及图像损伤方面的影响。
PTP为在实时制作工作流程中使用IP提供了必要的同步功能,监测定时稳定性十分重要。最后,迁移到IP是逐步实现的,在可以预见的未来,需要SDI/IP“混合”工作流程,进而需要混合诊断监测和分析工具及混合同步脉冲发生器/大师设备。B&P;
猜你喜欢
疯狂英语·新阅版(2021年6期)2021-07-19
装备维修技术(2021年44期)2021-02-17
河南科技(2019年11期)2019-09-10
数学大王·低年级(2018年9期)2018-10-24
数学大王·中高年级(2017年2期)2017-02-08
中学化学(2016年10期)2017-01-07
学苑创造·A版(2016年4期)2016-04-16
中学化学(2015年8期)2015-12-29
轻兵器(2001年4期)2001-06-13
祝您健康(1985年1期)1985-12-29
