基于动力学仿真的轻型履带车辆载荷获取与编谱
2018-07-24 00:40梁梓,王涛
装甲兵工程学院学报 2018年2期
梁 梓, 王 涛
(陆军装甲兵学院车辆工程系, 北京 100072)
疲劳断裂是履带车辆行驶中各承载件的主要损伤形式,其主要由行驶载荷引起,一般占所有损伤形式的80%以上[1]。为更好地进行减重优化设计和确定疲劳寿命,需要对行驶载荷进行准确估计,因此对车辆行驶载荷的获取和载荷谱的编制必不可少。
载荷谱是整车或者零部件所承受的典型载荷时间历程经数理统计处理后所得到的,表示载荷大小与出现频次之间关系的图形、表格、矩阵或其他概率特征的统称。国外通过100多年的研究,编制了各种领域大量的载荷谱数据库,在载荷谱的采集和编制方面已有诸多成果,且在基于载荷谱的疲劳研究方面也趋于成熟。国内对载荷谱的研究则起步较晚,在航空、车辆和特种设备等领域中取得了一定成果,尤其是在对不同领域和不同零部件的疲劳载荷谱编制和统一载荷谱编制程序等方面均有一定发展[2-3],但整体研究相对滞后,特别是针对履带车辆的载荷谱研究相对较少[4]。
鉴于此,笔者在对履带车辆行驶中的道路环境和行驶工况进行建模的基础上,构建轻型履带车辆模型并进行仿真,通过对采集的数据进行处理,编制其设计谱和试验加载谱,从而研究基于动力学仿真的载荷谱编制方法。
1 道路环境和行驶工况的模型建立
1.1 道路环境统计模型
履带车辆行驶的道路环境非常复杂,根据其不同的任务和作业需求可在各种类型的道路上行驶,包括铺装路、戈壁路、起伏路和碎石路等[5],对应的主要道路参数为路面不平度和土壤特征参数。其中:土壤特征参数包括地面附着系数、地面阻力系数和转向阻力系数,它与路面不平度可根据实测试验统计的相关数据确定;各种道路的行驶里程占比及其行驶的平均车速,可根据履带车辆定型试验和实际行驶中获得的数据确定。各类型道路参数[6-7]如表1所示。
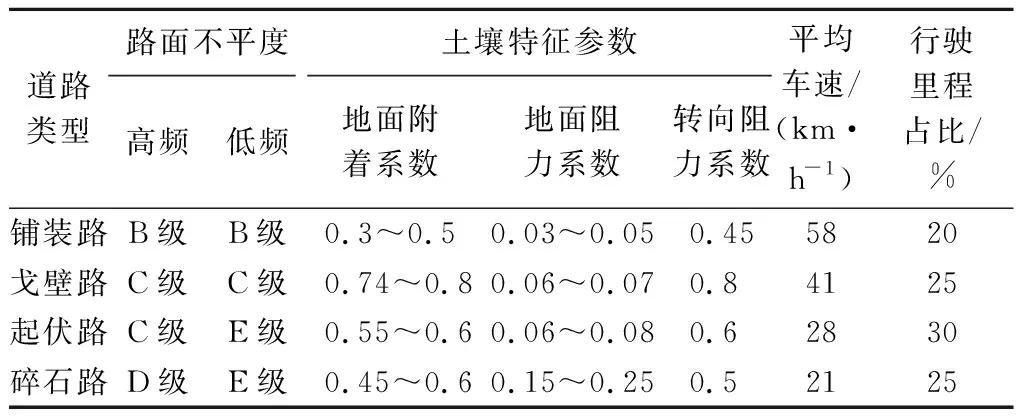
表1 各类型道路参数
1.2 操作工况类型
行驶工况建模时,考虑到的操作工况包括直行、转向、爬坡、制动、加速、减速。依据大量试验数据,统计履带车辆在不同道路环境下行驶10 km过程中进行各种操作工况的频次。除爬坡外,其余各操作工况的使用频次统计如表2所示。
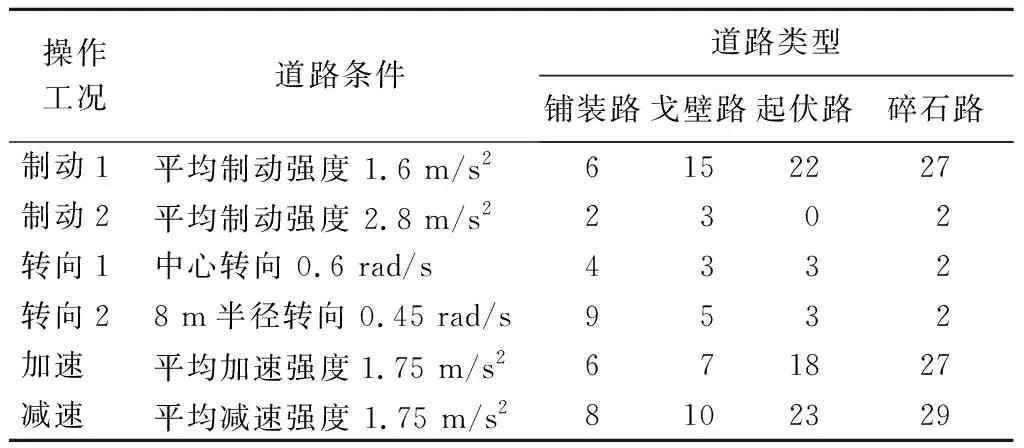
表2 不同道路行驶10 km时各操作工况使用频次
1.3 模型验证
通常,在理论上很难验证履带车辆仿真模型的可信度,因此采用实车试验进行验证。对该型履带车辆以2挡(速度为17.8 km/h)在15 cm高程搓板路上进行行驶试验,并采集驾驶员座椅正下方底甲板处的加速度信号。与仿真数据进行对比的结果如图1所示。可以看出:仿真数据和试验数据的大小、范围和变化趋势均相近,且二者功率谱主要峰值频率基本一致,说明仿真数据在一定程度上可代替实车数据。
2 动力学仿真
首先利用MATLAB生成发动机外特性模型与等级随机路面模型,将得到的相关数据导入多体动力学软件Recurdyn,最终得到轻型履带车仿真模型,并得到主动轮转矩时间历程。仿真流程如图2所示。为便于研究,本文只分析单侧主动轮的转矩时间历程。
由于爬坡工况行驶时速度极低,因此不区分路况,而按照坡度划分为30%坡度和60%坡度,分别命名为爬坡1和爬坡2。在4种类型的道路上,分别对不同操作工况进行仿真。各操作工况的有效仿真距离如表3所示。
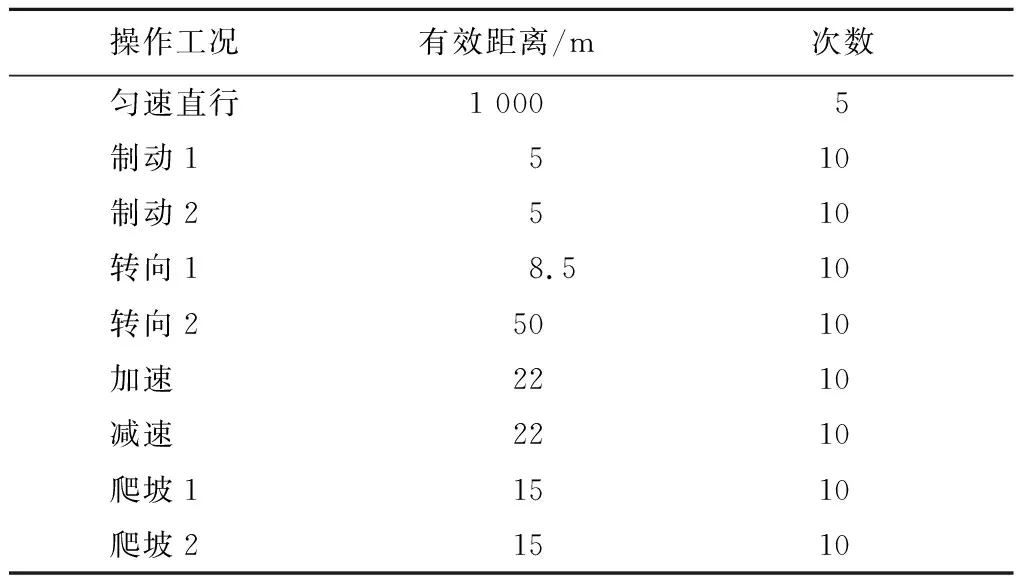
表3 各操作工况有效仿真距离
为便于后期处理,同步保存转矩、速度和位置等信息,而对于转向工况,只保存外侧主动轮的数据。
3 数据预处理与检验
为了消除干扰信号的影响,基于速度和加速度辨别各操作工况,再将各操作工况转矩信号提取出来。可通过GlyphWorks软件消除信号中的奇异点和异常趋势。
对于直行工况,为保证样本能够反映其随机特性,需要检验信号是否平稳以及样本长度是否足够。检验信号平稳性的常用工程方法为轮次法,其优点是只需要实测数据而不需要假设数据的分布规律,但对游程的判断不易用程序实现。因此,可采用统计学中经典的ADF方法进行平稳性检验。经该方法检验后的转矩信号均为平稳信号,且具有各态历经性。按照曲线拟合法[8]检验样本长度对数据分布参数的适应性,其步骤为:首先,对样本统计值随样本容量增大的变化规律进行回归分析,得到对应的方程;然后,以该方程的极限作为总体参数,根据其与计算得到的总体参数之间的相对误差来控制样本的长度。
4 设计谱编谱
4.1 雨流计数
为了进行疲劳寿命估算和疲劳试验载荷谱的编制,采用雨流计数法进行计数,其最主要的优点为:能够如实再现变幅循环加载,并可识别复杂载荷序列中与恒幅疲劳数据相似的事件。利用Tecware对各操作工况转矩信号进行雨流计数,得到雨流矩阵,其计数时门限值取12%[9]。图3为戈壁路面直行工况的雨流矩阵。
4.2 按里程外推
通过仿真得到在有限道路里程下的载荷谱。为了对疲劳寿命进行分析,需考虑到试验里程和实际使用里程不符的问题,因此必须采用按里程外推的方法[10]。以10 000 km为目标寿命对原始雨流矩阵进行外推,得到车辆的目标载荷谱。外推后不同操作工况里程分配比例见表4。以直行工况为例,其戈壁路面外推后的雨流矩阵见图4。

表4 外推后不同操作工况里程分配比例 %
4.3 雨流矩阵合成
对不同工况和合成工况下各路面进行合成,得到以雨流矩阵表达的载荷设计谱,其中:匀速直行工况合成雨流矩阵如图5所示,合成工况合成雨流矩阵如图6所示。
4.4 载荷累积频次统计
对不同工况下载荷累积频次进行统计,而后将二维矩阵降维为一维的累积频次曲线,并绘制在同一图像中,得到不同工况下的载荷累积频次分布图(即以累积频次分布表达的载荷设计谱),如图7所示。可以看出:
1) 合成工况的载荷极大值出现在加速工况,约为22 kN·m,已接近单边履带的牵引力矩上限;大幅值载荷集中于转向2和加速工况;小幅值载荷的累积频次来源则主要集中于直行、转向2、减速和加速4种工况(结合表4可知:与其他工况相比,此4种工况的里程分配比例较大,说明小幅值载荷累积频次与工况里程分配比例密切相关)。
2) 对损伤贡献较大的大幅值区域可分成3组,其中贡献最大的一组由转向2、减速和加速工况组成,贡献最小的一组由制动1和制动2工况组成,2组曲线形成一个狭长通道,其余工况都集中分布于这个通道内。
3) 加速和减速工况的分布形式与合成工况最为接近,而直行工况的幅值分布最为均匀。
5 试验加载谱编谱
5.1 载荷压缩
载荷压缩通常是基于损伤损失和功率谱密度对比分析后确定。对于暂不明确具体估寿对象的情况,只基于一般性假设对载荷谱进行压缩处理。假设元件符合一般的低周寿命设计原则,且元件材料属于一般金属,按照最大幅值15%截除小幅值载荷[11]。对于图7中合成工况对应的载荷谱,相当于截除幅值小于3.3 kN·m的载荷,由于载荷的幅值分布是离散的,故直接截除小于3.413 kN·m的载荷,此时剩余的累积频次为9.4×106。图7中的“压缩”曲线对应压缩后的载荷累积频次分布。
5.2 八级程序块加载谱及随机序列
5.2.1 八级程序块加载谱
使用非等间隔法生成通用性广、对试验台硬件要求低的八级程序块加载谱。八级程序块加载谱可用一条8级阶梯曲线描述其频次分布,相邻载荷幅值间隔的比值系数α∈{1,0.95,0.85,0.725, 0.575,0.425,0.275,0.125},每一级幅值等于压缩载荷谱中的“最小幅值+(最大幅值-最小幅值)×比值系数”,对应的频次从原频次曲线中按中值原则选取,以满足曲线覆盖面积相等的要求。由此可以得到八级程序块加载谱的累积频次分布图(即以累积频次分布表达的载荷试验加载谱),如图8所示。
5.2.2 载荷序列生成
载荷序列的生成可采用波动中心法,也可依据元件力学特性将平均应力转换为对幅值的影响后再处理。考虑到不确定估寿对象的力学特性,这里采用波动中心法。
波动中心法基本思想为:首先,对试件加载一个固定的转矩,即载荷均值(这里通过计算设计谱的统计累积频次得到总体载荷均值,为3.045 N·m);然后,将转矩幅值以载荷均值为中心,按照上下对称的形式顺序加载到试件上。该方法的要求是:载荷序列生成时,程序块加载10次以上,因此应保证每级幅值的循环次数可形成10个以上的程序块;每次加载对应有8个级别的程序块,其加载顺序按照“小幅值—大幅值—小幅值”的次序连接,以模拟随机加载的情况。
5.3 基于雨流矩阵的加载谱和随机序列
在加载试验台性能允许的条件下,可直接加载外推与压缩后的时间序列。这时需要统计雨流矩阵中在各载荷等级上的载荷极大值和极小值,同时生成一组对载荷极大值和极小值随机排序形成的随机序列。依据此原理,利用Tecware生成的随机序列如图9所示。此外,还可通过缩短时间间隔和限制载荷幅值的方法对随机序列作进一步的压缩。
6 结论
通过多种典型工况的仿真与分析,得到了轻型履带车辆主动轮上代表性转矩载荷的设计谱与试验加载谱。对比典型载荷发现:车辆的加速、减速和转向工况对大幅值载荷和小幅值载荷都有较大贡献,产生的损伤最大,其相应的载荷是整个载荷的主体。
基于虚拟样机的载荷获取与编谱,是一种成本低、效率高的编谱方式,当前在工程中已得到应用。它不仅能够在设计初期起到载荷估计的作用,同时也可指导样车的载荷采集试验。借助该方法可帮助工程人员进行试验方案的提前预判,如量化工况的差异性、检验样本容量的合理性、检验传感器参数的准确性等。因此,该方法对提升载荷谱试验采集、编制工作的快速性与有效性具有很好的应用价值。
猜你喜欢
装备维修技术(2022年7期)2022-07-01
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
兵器装备工程学报(2021年3期)2021-04-09
电机与控制学报(2018年9期)2018-05-14
创新作文(1-2年级)(2017年11期)2018-04-17
中国新技术新产品(2018年22期)2018-01-05
筑路机械与施工机械化(2016年12期)2017-01-13