
基于变论域模糊方法的电力推进船舶二次调频控制
2018-08-14 15:07李洪跃王锡淮肖健梅
中国舰船研究 2018年4期
李洪跃,王锡淮,肖健梅
上海海事大学物流工程学院,上海201306
0 引 言
船舶综合电力系统将船舶动力系统与电力系统结合起来,在优化船舶结构布局,提高燃油经济性和故障容错率等方面体现出巨大的优势,已成为未来舰船发展的主要方向[1]。随着船舶发展的大型化和多用途化,不仅要求船舶电力系统在复杂多变的水域环境和快速大功率扰动下保持稳定,同时还要求其具有较高的能量利用率和较低的气体排放。因此,将可再生能源和储能单元引入船舶电力系统组成的混合电力推进系统[2-5],受到了广泛的关注。
在船舶电力系统工作的过程中,负载功率变化以及可再生能源功率的不稳定输出,会造成电力系统输出功率与需求功率不匹配,从而引起负荷频率波动;系统频率不稳定,将影响船舶通信导航等设备的正常工作,严重情况下会导致电力系统崩溃。由于混合电力推进船舶作为一个离岸孤立运行的系统,与陆地微电网系统具有一定的共性,因此针对频率控制的相关方法可以借鉴。米阳等[6-7]针对光柴互补的孤立微电网系统,提出了一种基于负荷估计的滑模控制方法。通过对扰动功率的估计和电网频率变化,设计滑模补偿控制器,对柴油发电机组输出的有功功率进行控制。该控制方法具有较好的鲁棒性,并且降低了控制器设计的成本。Liu等[8-10]针对线性化的负荷频率控制模型,采用模型预测控制(MPC),对分布式微电网系统的频率波动进行控制,通过反馈校正和滚动优化过程,使得该控制方法具有较好的抗干扰能力和实时性,但是电力系统是一个非线性时变的不确定系统,模型预测控制对此系统的控制问题并没有很好地解决。Sun等[11-12]针对将可再生能源引入到电网系统中引起的功率波动,考虑通信网络对微电网二次调频控制带来的时滞影响,设计基于线性矩阵不等式的输出反馈鲁棒控制,利用李雅普诺夫理论,建立了线性矩阵不等式约束条件,通过求解得到时滞状态反馈控制器。Bevrani等[13-14]针对多能源组成的分布式微电网系统,采用基于H∞和μ综合方法的鲁棒控制设计二次频率控制器,分别利用线性矩阵不等式和DK迭代方法进行控制器的求解,并在频域内验证了所设计控制的鲁棒稳定性和鲁棒性能。该控制方法对系统在外部扰动和内部参数摄动情况下引起的频率波动具有较好的控制性能,但由于所设计控制器的阶数较高,增加了控制器设计的成本。以上方法针对陆地由多能源组成的微电网系统的二次调频控制取得了较好的控制效果,所设计的控制器具备较好的鲁棒性和控制精度。但上述控制方法的设计都需要基于精确的数学模型,而电力系统中由外部扰动和参数摄动引起的负荷扰动是一个难以建模的非线性系统。在陆地电网中,由于机组容量可以看作无限大系统,建模过程中的近似线性化并不影响系统的整体性能,而在船舶电力系统中,负荷电机和发电机通常具有相同的容量,电机的启停和变负荷运行会对系统的稳定运行造成巨大影响,同时受风浪的影响,系统发电侧的输出功率和用电侧的需求功率不能保持平衡。虽然上述控制策略对船舶微电网的二次频率控制具有一定的借鉴性,但是难以保证控制器的鲁棒性和控制精度,或者还会增加设计成本。
模糊控制通过采用不确定或者不精确的语言描述已知信息,并将其转换为控制行为,对类似电力系统中具有外部扰动和难以建模的参数摄动模型具有较好的控制效果,在解决微电网的二次调频控制中可以得到较满意的控制效果[15-16]。同时,模糊控制的控制精度受其隶属度函数的影响,控制精度越高,要求的控制规则越多,这对于以工程人员的经验和专家知识来总结控制规则的模糊控制器来说是无法做到的。因此,从某种意义上说,模糊控制属于一种粗糙的控制方式。
基于以上分析,本文将以包含储能单元的船舶电力系统为研究对象,在考虑外部负荷扰动和参数摄动的情况下,采用变论域模糊方法设计控制器进行调频控制。通过引入伸缩因子,使模糊控制中隶属度函数的论域具有根据输入量大小自动调节范围的能力,从而提高控制器的控制精度。最后通过仿真实验,验证该方法的正确性和合理性。
1 模型描述
混合电力推进船舶由柴油发电机组、蓄电池、交流母线、电气负载和推进器组成,其结构布局如图1所示。
其中,柴油发电机组作为最主要的能量源,通过原动机带动同步发电机输出三相交流电。电池利用其快速充放电特性,平衡负载功率和柴油发电机输出功率之间的差值。交流母线承载柴油发电机组和蓄电池的输出功率,通过变压过程为负载供电。系统负载主要包括电动机带动的螺旋桨负载和其他电气负载,如伺服泵、侧推器和导航设备等。
在船舶运行过程中,当主推进电机及其螺旋桨启/停与变负荷运行,以及侧推器或者服务泵机等大功率电机启/停与变负荷运行时,将对船舶电网产生较大冲击。当负荷功率变化时,发电机的电转矩会发生变化,引起柴油机机械转矩和电转矩的不平衡,导致发电机在运行的过程中转速发生变化,最终使得电网的频率波动与发电机有功功率输出不稳定。保持船舶电网功率平衡,可表示为
式中:ΔP为船舶电网功率变化;ΔPdeg为柴油发电机组输出功率变化;ΔPbat为电池功率变化,当电池输出功率时为正,电池吸收功率时为负;ΔPload为系统扰动功率。当系统频率波动不大时,首先利用调速器的调速特性进行一次调频,但是一次调频为有差调频,在频率波动较大的情况下无法将频率恢复到基准值,因此必须使用二次调频功能使频率保持稳定。对系统的频率进行控制,本质上是对柴油机组的转速进行控制,忽略调速过程对发电机励磁的影响,单机组的频率控制模型如图2所示。
系统各组件经拉氏变换后,用一阶惯性模型表示如下。
调速机环节:
原动机环节:
发电机环节:
式中:s为拉普拉斯算子;ΔXg为调速机输出;Tg为调速机时间常数;Δu为系统输入;Δf为系统频率偏差;R为下垂系数;Tdeg为原动机时间常数;M为惯性系数;D为阻尼系数。
电池模型采用文献[17]建立的输入输出模型,为进一步掌握电池剩余容量,在其基础上加入了电池荷电状态(SOC)输出环节,其模型结构如图3所示。其输入为二次频率控制信号,输出为电池输出功率ΔPb。
图中:C0表示电池初始容量;Cmin表示电池容量下限;Cmax表示电池容量上限,通过对电池容量上、下限的限定,使电池避免出现过充过放的现象,保证电池的安全性和使用寿命;Gb(s)表示电池经过拉氏变换后的一阶惯性环节,
式中,Tb为电池时间常数。
2 变论域模糊控制
2.1 论域的变换
模糊控制以模糊语言为基础,非常适用于非线性系统。但是要得到较高精度的模糊控制器,则需要控制规则足够充分,这对于工程人员来说非常困难。因此,郭海刚等[18]提出了变论域模糊控制。
考虑多输入单输出的模糊控制器,设Xi=[-Ei,Ei],(i=1,2,…),为输入量xi的论域,Y=[-U,U],为输出量y的论域,其中Ei和U均为正实数,为Xi和Y的初始论域。变论域是指Xi和Y随变量xi,y的变化而调整,即
式中,αi(xi)和β(y)为论域的伸缩因子,如图4所示。
从图4中可以看出,通过选择合理的伸缩因子使得论域进行改变,在规则不变的前提下,论域的缩小和放大相当于规则的增加和减少,从而提高控制精度。
2.2 伸缩因子的设计
变论域模糊控制效果的优劣,最主要的是伸缩因子的设计和选择。系统误差的状态是确定伸缩因子的主要因素,当系统误差较大时,选择原始控制规则粗略控制,此时α(x)趋向于1;当误差减小时,控制规则应随误差变化适当加密,使误差收敛速度适当加快,因此α(x)也应适当变小;当误差变得很小趋于0时,控制规则应随之变得精密,以进行精确控制,因此伸缩因子也应趋于0。伸缩因子的选择,需要同时满足避零性、单调性、协调性、正规性和对偶性原则[19]。
为此,采用增量法设计伸缩因子[20]。假定x的增量为Δx,则相应的α增量为Δα,近似认为Δx与Δα成正比。同时,对于同样大的增量Δx,若x越大,Δα应越小;由于α不超过1,所以α越接近1,Δα应越小,则
通过求解,得到伸缩因子的函数表达式为
从式中可以看出,当|x|趋向于E时,有α>0;当 |x|趋向于0时,同样有α>0。因此,伸缩因子的选取满足设计原则。进一步对式(8)关于x求导,则有
当|x|趋向于E时,趋于0;当 ||x趋向于0时,趋于λk,通过选择合适的k,使得α具有较大值。因此,式(8)所示的伸缩因子既满足基本设计原则,又同时满足优化设计准则,具有较好的使用效果。
3 模糊控制器的设计
模糊控制器设计为两输入单输出的响应函数,以频率偏差信号e(t)+eset(t)及其变化率作 为 模 糊 控 制 的 输 入 信 号 ,其 中ė(t)<0,eset(t)为由限速器约束得到的误差门槛值。控制器输出为系统二次频率控制信号,控制信号作用于调速机,通过改变调速机的调速特性来改变有功功率输出,使得系统频率回到设定值,同时电池通过充、放电过程减小系统频率波动。伸缩因子通过输入的误差信号及其变化率的大小,来对模糊控制器的隶属度函数进行自适应调整。加权因子τ1,τ2对输入信号进行调节,以获得控制器较好的输出性能,其输入输出关系如图5所示。
模糊控制器对负荷频率的控制过程分为3步:
1)对系统变量模糊化。对系统的输入输出信号进行模糊化,构成模糊集。通过隶属度函数,计算出输入量及输出量的隶属度,将输入量e(t)与划分为 7个等级的模糊子集:{NB},{NM},{NS},{Z},{PS},{PM},{PB},分别对应为{负大}、{负中}、{负小}、{零}、{正小}、{正中}、{正大},输入变量的论域变化范围根据长期统计确定;输出量同样按照隶属度函数划分为7个等级的 模 糊 子 集 :{NB},{NM},{NS},{Z},{PS},{PM},{PB}。系统的隶属度函数如图6所示,每一个隶属度函数的取值范围为[0,1]。系统变量的论域范围视输入输出的变化情况而定,通过伸缩因子,可以保证系统变量论域有较好的自适应性。其中e(t)的论域范围为的论域范围为
2)模糊推理过程。根据系统变量模糊化过程,按照负荷频率控制要求,确定模糊控制规则,如表1所示。

表1 模糊控制规则Table 1 Fuzzy control rules
根据表1所示规则,可以得到模糊子集表示的输出量。
3)反模糊化。将模糊推理得到的被控量转化为实际控制的精确量,模糊控制得到的控制器输出量经过反模糊化变换成表示在论域范围内的精确量,再将论域内的精确量变换为实际的控制信号。
4 仿真验证
为了验证基于变论域模糊控制的混合电力推进船舶负荷频率控制,根据式(2)~式(5)描述的负荷频率控制模型在Matlab/Simulink环境中搭建仿真模型。采用文献[21-23]中的系统模型参数,如表2所示。
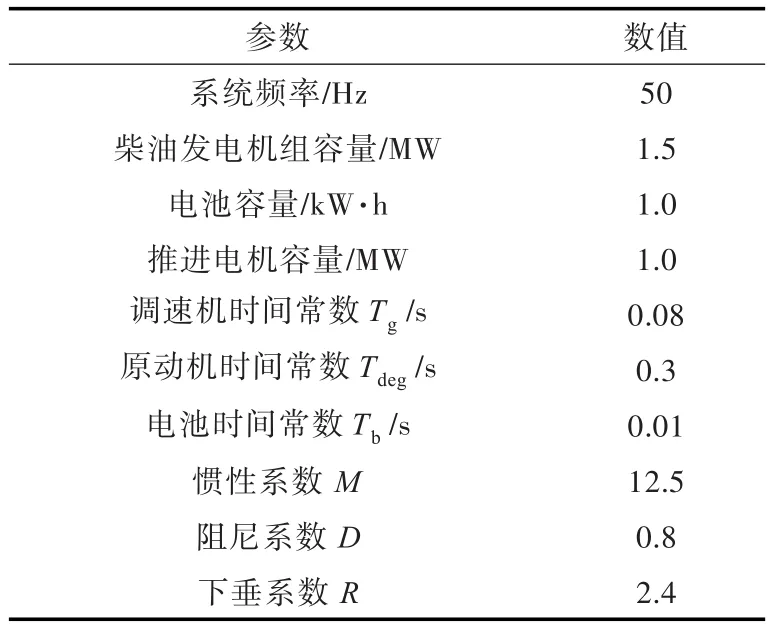
表2 系统参数Table 2 System parameters
首先,图7所示为接入电池的混合电力系统与没有接入电池的电力推进系统在传统PID控制方法下的动态响应输出对比,假设系统受到阶跃扰动功率ΔPload=0.1 p.u.,电池初始SOC设定为0.6,SOC上限设定为0.9,下限设定为0.1,在仿真过程中加入限制约束,避免电池出现过充过放现象。从图7中可以看出,通过把电池引入船舶电力系统,明显降低了系统负荷频率波动次数,缩短了系统恢复稳定时间。同时在引入电池的系统中,通过电池对系统扰动功率的响应特性,降低了柴油机组功率输出变化。从结果中可以看出,引入电池的系统中柴油机组输出功率要大于未引入电池的电力系统,这是因为传统的PID控制方法局限于对柴油发电机组的功率控制,而并未考虑电池对系统的影响,导致柴油机过多地输出功率为电池充电。
其次,为了验证变论域模糊控制的合理性,以传统模糊控制作为对比,假设系统受到阶跃扰动功率ΔPload=0.1 p.u.,在电池SOC设定不变的情况下,输出响应如图8所示,图中,VUFC为变论域模糊控制曲线,FC为模糊控制曲线。从图中可以看出,在变论域模糊控制下,系统由于外部功率扰动产生的频率波动范围明显小于传统模糊控制,其频率在5 s左右就已经恢复到基准值,而传统模糊控制在系统产生的超调量和收敛时间上均劣于变论域模糊控制。同时,由于负荷功率变化导致系统输出功率与需求功率不平衡,系统通过二次调频控制器改变调速机的调速特性,在变论域模糊控制下柴油机输出功率能在较短的时间内再次达到稳定。从电池SOC变化曲线可以看出,电池通过其充、放电功能吸收了电网中的扰动功率,减少了柴油发电机组的功率调节。同时在变论域模糊控制下,电池SOC的改变量较小,进一步避免了电池产生过充过放现象,提高了电池安全性。
最后,验证系统在参数摄动情况下的输出响应。假设系统模型参数具有±20%的摄动范围,在相同电池状态下,系统的主要输出响应如图9所示。由于系统因工作环境导致的参数摄动是难以建模和测量的,在这种情况下,由于模糊控制基于不确定信息得到的控制器仍然具有较好的鲁棒性能。从图中可以看出,在参数摄动情况下,传统模糊控制和变论域模糊控制仍然能保证系统频率恢复稳定,但相比于外部扰动情况,增加了其恢复稳定的时间,变论域模糊控制在8 s时间内恢复稳定,传统模糊控制则需要14 s的时间。柴油机组的输出功率相比于图8变化更剧烈,但最终仍然可以保证稳定输出。从电池SOC的变化曲线可以看出,由于参数摄动的不确定性,增加了电池输入输出功率的变化,相比于图8,SOC的改变量加大了。
从以上实验可以看出,引入电池组成的混合式电力推进系统,通过电池的充、放电功能可以进一步保证系统频率的稳定性,减小柴油发电机组输出功率的波动,间接提高柴油机组的燃油经济性。基于变论域模糊控制在外部扰动和系统参数摄动情况下,相比于传统模糊控制,具有较好的鲁棒稳定性和鲁棒性能。
5 结 语
本文针对船舶电力推进系统,为解决由负荷功率扰动和系统参数摄动情况下引起的系统频率波动,采用模糊控制方法设计二次频率控制器。首先建立包含电池储能的船舶电力系统负荷频率控制模型;然后为了提高模糊控制的控制精度,引入伸缩因子对隶属度函数论域范围进行了调整,使控制器隶属度函数具有跟随输入误差自适应变化的能力;最后设计仿真实验进行验证,结果表明引入电池储能可以明显提高系统稳定性,变论域模糊控制可保证系统频率具有较小的超调量和较短的稳定时间,保证系统的鲁棒稳定性和鲁棒性能。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
计算机仿真(2022年2期)2022-03-15
太阳能(2022年2期)2022-03-07
汽车实用技术(2022年3期)2022-02-23
哈尔滨工程大学学报(2021年7期)2021-07-13
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
计算机与数字工程(2019年8期)2019-09-03
科技视界(2016年18期)2016-11-03
