
基于ADS80数码影像空三加密流程及精度分析
2018-08-24 02:10李海伟王翠霞
水科学与工程技术 2018年4期
李海伟 ,姚 喜 ,王翠霞 ,安 洁
(1.济南市勘察测绘研究院,济南 250013;2.山东省水利勘测设计院,济南 250013)
ADS40测量系统在2001年推出,其主要是由瑞士徕卡公司所开发,其扫描和摄影主要是基于线阵CCD。之后瑞士徕卡公司在2008年又推出了ADS80,这款测量系统是在ADS40基础上发展而来,并添加了一系列相关功能,其已经达到了世界先进水平,在国内外都有广泛应用。为了将摄影测量的效果进行有效提高,国内许多相关机构购置这个系统,将其应用在各大领域,如通信、水利、能源、规划、交通、测绘等,这对于行业的基础建设项目具有一定的实际意义。
传统的空三加密还存在很多缺点,不能够满足当下的一些需求,为了得到更好的摄影测量效果,开发先进的测量系统十分必要,而Leica ADS80机载数字航空摄影是当下非常先进的测量系统,执行航摄任务具有成图速度快、精度高、获取产品多的特征。其具有的惯性导航定位系统和全球定位系统都是高精度的,可以实现多角度的精确摄影,且还可将外业控制进行有效减少,很好地解决了高程精度不足问题。执行航摄任务具有成图速度快、精度高、获取产品多等特征。利用Leica Gpro软件平台对ADS80三线阵影像进行空三加密,相比传统的框幅式影像的空三加密,需要的控制点少,且高程精度较高,大大减少了外业工作量,降低生产成本,缩短生产周期。
由于ADS80数据具备的各项优势,在南四湖下级湖抬高蓄水位影响处理工程项目中的1∶2000比例尺地形图测绘,主要采用ADS80数据。
1 工程概况
南水北调工程中输水、蓄水主要使用南四湖的下级湖,其对应的蓄水量也会发生较大变化,一定程度上对湖区生态环境造成了影响。一般来说,水位越高的话,其对应的渔湖业发展、水资源利用情况也会越好,具有一定的经济效益。项目确定3条水位线,高程分别是32.3,32.8,33.3m,因此对高程精度和影像的现势性等要求较高。
本项目选择使用ADS80推扫式数字航摄仪,其主要是利用了三线阵扫描原理,并进行多角度的摄影,能够同时获得具有前视、下视、后视、100%三度重叠度、连续无缝的高精度立体影像。基准面GSD为15cm。
微山湖空三加密区总航线有34条,测区共布设26个像控点,根据每次架次航摄位置不同及航线长短不同,整个加密区分成2个空三加密小区,逐个进行平差计算,具体分区如图1。

图1 分区示意图
图中微山湖01-14航线为加密1区(project_wsh),微山湖15-34航线为加密2区(project_wsh2p)。
2 ADS80数码影像空中三角测量
对ADS80数据进行独立处理的空三加密软件很少,这与采集的数据非常复杂有关。而徕卡公司为了快速有效地进行相关分析,推出了Leica Gpro软件平台,专门分析处理ADS数据,具有一系列方便实用的功能。使用该软件,可快速生成正射影像或立体图像。为此,该项目内业处理设备及软件引进了Leica公司摄影测量系统,主要包括ADS数据后处理系统Gpro、POS数据处理系统IPAS、全数字摄影测量工作站LPS、自动空中三角测量ORIMA和遥感影像处理软件ERDAS。其中,作为一种自动空三加密软件,其具有基本不受数据量限制、操作简单、自动、高效等优点。
Leica摄影测量系统的各软件模块主要功能为:Gpro软件主要是用来对ADS80采集数据的前期处理,影像纠正、创建工程、数据下载等都可由其完成,并进行初级加密。I GPS/IMU数据进行一系列相关处理主要是利用PAS软件来进行,并获得相应的得到姿态和位置数据信息,之后在将其进行融合,从而得到定姿数据。联合平差计算区域网主要使用Orima来进行相关分析。
2.1 数据准备
空三加密前需要准备原始数据:
(1)LO级影像数据文件,TIF格式。
(2)影像参数文件(.ads)文件。
(3)飞行GPS-IMU数据。
(4)相机参数文件(cam)。
2.2 空三加密流程
ADS80空三加密采用Leica公司摄影测量系统,主要包括ADS数据后处理系统Gpro、POS数据处理系统IPAS、全数字摄影测量工作站LPS、自动空中三角测量ORIMA和遥感影像处理软件ERDAS。首先需要对原始数据进行预处理,得到L0级影像,在建立测区后进行区域内连接点匹配,完成区域网平差计算。加入像控点及检查点后进行区域网的联合平差解算。当检查点的残差满足精度要求时,输出加密成果,提交下工序使用。
ADS80数据的空三加密基本流程主要包括Orima平差解算、同名点匹配、影像预处理、GPS/IMU数据解算等,下面将对其进行简单介绍,如图2。
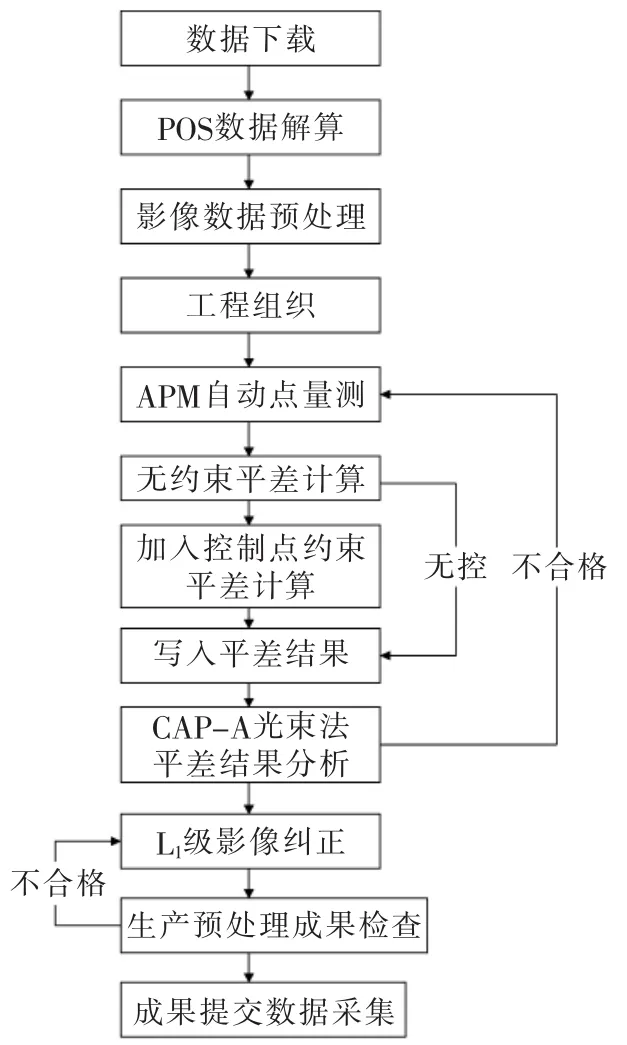
图2 加密流程
2.2.1 POS(GPS/IMU)数据解算
GPS数据解算对本次分析至关重要,一般来说,在有地面基站的情况下,将会更多选择WayPoint软件,而在没有地面基站的情况下,将会更多选择IPAS PPP软件,计算将会使用后向和前向,并对比两者的计算结果,一定要保证两者误差在一定误差范围内。融合GPS和IMU数据常用软件为IPASPRO,其不仅可进行轨迹光滑,还可将其一系列相关数据进行有效解算,并得到相应的最优轨迹文件,导航信息一般会按照时间顺序进行记录,还会相应地产生一系列相关文件,这对其将相关误差进行有效反映至关重要,主要包括速度中误差、姿态中误差和位置中误差等。
2.2.2 影像数据预处理
对采集的相关数据进行相关检查,检查通过后,解压相关坐标信息,并建立对应坐标关系,可以根据机载GPS/IMU进行关联影像曝光和观测时间,使相关数据带有坐标信息,得到相应初始定向文件EOP,进而得到金字塔影像和L0级影像,即可用于添加人工点和平差。
2.2.3 APM自动点量测
实际地理定位信息和L0级影像文件会有误差,为了有效减小误差,在相关技术基础上,实现自动同名点匹配,使用空中三角进行测量,达到重定向各条航带的目的。自动点量测可将APMADS80数据进行有效匹配,其主要是根据多视角、多光束、多片的自动点来进行,可得到较佳的影像匹配。
2.2.4 ORIMA平差解算
平差解算是较关键的一环,主要使用Orima进行,在平差前设定相关参数,主要包括粗差剔除选项、权中误差值、迭代次数等。
2.2.5 输出成果
在进行系列的操作后,输出最终加密成果,主要为一系列不同信息文件,如高程异常修正值文件、七参数文件、相机文件、影像的初始定向文件等。
无约束平差空中三角测量数据处理的技术要求:
(1)ORIMA空三Sigma值小于2。
(2)X,Y,Z,O,P,K的权在0.8~1.2之间。
(3)Antenna Centers RMS:X,Y,Z值小于0.2。
(4)IMUAngles RMS:X,Y,Z值小于0.05。
3 精度评定及分析
3.1 主要精度要求
相关参数对应的精度要求,具体参考如表1,空三报告统计如表2。

表1 精度要求
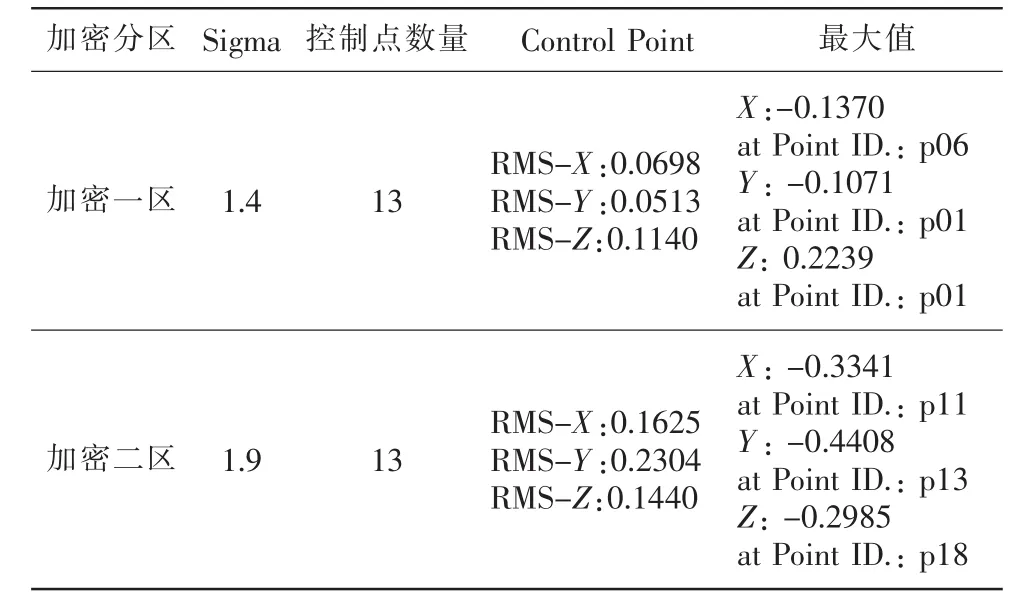
表2 空三报告统计
3.2 精度影响因素
3.2.1 GPS/IMU数据精度
从ADS80数字航空摄影的特点来看,空三加密过程不依赖于地面控制点,而根据空三解算相关数据,影像数据在被ADS80相机获取时,也相应被记录到MM40系统中。一般来说,影像采样频率较高,而GPS接收机对应的采样频率明显更小,虽然获得的位置参数十分精确,但其对应的可靠性较差,尤其是在高动态环境中。在较短的时间内具有较高的精度是IMU数据的一大特征,如果时间在慢慢延长变化,其对应的误差也会相应变大,这时就需要利用相关工具进行矫正,及时矫正对于有效控制误差来说至关重要。此外,还需要将周跳、信号失锁等问题进行有效解决,一般发生在动态环境中,可以利用传感器传回来的相关姿态和位置信息进行处理。GPS/IMU的精度情况对于ADS80系统的性能情况起着十分关键的作用。
3.2.2 坐标系统
WGS84坐标系是ADS80主要的参考坐标系,其中高程坐标系和平面坐标系都是使用该坐标系,这与WGS-84椭球具有较高精度和一定的可靠性是分不开的。在进行相关数据分析时,如果涉及到坐标变化范围的数据时,需要将其进行相关转化,这对高程精度至关重要。
3.2.3 基高比影响精度分析
基高比是影响高程精度量测的重要因素。人员立体观测一般会受基高较大影响,所以高程量测精度可能存在较大误差。一般来说,基高比越大,立体夸大现象越明显,可以得到更准确的立体采集。ADS80航摄系统相比市场上其他系统要高出很多,0.76为其对应的最大基高比,为绘制高程精度图提供了保障。
4 结语
ADS80机载数字航空摄影是目前非常先进的测量系统,其优势特点具体如下:
(1)ADS80进行摄影使用的是三线阵方式,可获得较高质量的立体影像,且可实现多个角度摄影,相互补充盲点,对可能被遮挡的位置进行有效采集。
(2)ADS80具有高精度的惯性导航定位系统和全球定位系统,可实现多角度精确摄影,有效减少外业控制,很好地解决高程精度不足的问题,具有更高的整体成图精度。
(3)完整影像采用单一镜头就可获取,其需要的控制点少,且高程精度较高,大大减少了外业工作量,降低生产成本,缩短生产周期。
(4)通过南四湖项目,本文主要选择Leica ADS80进行相关研究探讨,其机载数字航空摄影是目前非常先进的测量系统,执行航摄任务具有成图速度快、成图精度高、获取产品多的特征,可实现多角度的精确摄影。本次设计结果显示,空三精度符合1∶2000比例尺精度要求,且其对应的控制点明显减少,可实现较好的作业要求,将外业工作量进行有效减轻,大大提高了生产效率和地形图更新速度,具有广泛的应用前景。
猜你喜欢
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
当代陕西(2020年23期)2021-01-07
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
太原科技大学学报(2019年3期)2019-08-05
企业科技与发展(2018年5期)2018-09-10
信息安全研究(2016年10期)2016-02-28
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28
电子设计工程(2015年17期)2015-02-27
