
基于神经网络的轴流转桨式水轮机传递系数
2018-09-13 12:42黄建荧黄一冲肖志怀
水利学报 2018年8期
刘 冬,黄建荧,王 昕,黄一冲,熊 祺,肖志怀
(1.武汉大学 流体机械与动力工程装备技术湖北省重点实验室,湖北 武汉 430072;2.武汉大学 动力与机械学院,湖北 武汉 430072;3.福建水口发电集团有限公司,福建 福州 350004)
1 研究背景
水轮机是一类重要的能量转换装置,具有强烈的非线性和动态特性,这使得建立其精细化模型十分困难。工程上一般利用稳态特性近似代替动态特性来建立水轮机模型[1],对水轮机稳定性、动态特性以及控制策略进行研究。近年来,关于水电机组的研究多采用水轮机线性化模型[2-5],其表达式中的传递系数对于分析结果具有重要影响。目前,求取传递系数以建立水轮机线性模型的方法主要有外特性法和内特性法[6]。其中内特性法建模依赖水轮机几何参数和结构参数,实际中这些参数有时难以获得准确数值,同时对小开度的效率估计误差较大,会影响传递系数的计算精度[7]。外特性法常用模型综合特性曲线的局部线性化表征水轮机在某一工况点附近的动态特性[8],该方法的仿真结果精度较高。此外,利用简化非线性模型[9]求解水轮机传递系数,虽然计算方便,但对模型简化过多,得到的传递系数不够准确和合理[10]。
神经网络能够实现复杂非线性关系的映射,且具有良好的泛化能力,是建立水轮机非线性模型的有效工具[11]。神经网络的类型众多,前馈型神经网络是一类重要的神经网络。国内学者利用不同前馈型神经网络的性能和特点,对水轮机非线性建模方法进行了研究[12-15]。此外,由于模型训练数据通常来自水轮机模型综合特性曲线,得到的神经网络只能表示水轮机工况区的小部分,无法全面反映机组的运行特性。利用适当边界条件对机组特性进行有效延拓[16],有助于研究机组全工况的动态品质。
基于外特性法的水轮机传递系数计算方法主要采用两点法或曲线拟合,适合计算有限工况点的传递系数,且计算繁琐,难以清晰而全面地认识传递系数随工况的变化规律。相比混流式水轮机,轴流式水轮机增加了与桨叶角度有关的传递系数,计算更为复杂。因此,本文以轴流转桨式水轮机为例,结合模型综合特性曲线和BP神经网络,提出了一种求取水轮机传递系数的简便方法。利用模型综合特性曲线、飞逸特性曲线和边界条件建立水轮机的两种神经网络模型(延拓和未延拓模型);考虑参数变换和归一化处理,根据流量特性和力矩特性神经网络的数学表达式,计算流量和力矩对各变量的偏导数;将不同工况的变量值代入偏导数公式得到相应的传递系数。最后,将该方法与曲线拟合法进行了比较,分析了两种方法各自的特点,证明了新方法的可行性。
2 基于曲线拟合的水轮机传递系数
轴流转桨式水轮机的分段线性化模型是通过8个传递系数建立的,一般采用曲线拟合的方法求取传递系数,具体步骤如下[17]。
(1)水轮机流量(或力矩)对导叶开度传递系数eqy(或ey)。在定桨模型综合特性曲线上,按照水轮机的实际运行范围,等间距画出若干等单位转速线,并与等开度线相交(如图1)。取出等单位转速线上的交点,经计算得到(Q11,a)(或(M11,a)),并将单位参数Q11(或 M11)换算为实际流量(或力矩),做出导叶开度和流量(或力矩)关系的拟合曲线,其斜率即为相应工况的eqy(或ey)。

图1 S水轮机桨叶角度15°时的模型综合特性曲线
(2)水轮机流量(或力矩)对桨叶角度传递系数eqz(或ez)。根据(1)中取出的交点,计算得到(Q11,φ)(或(M11,φ)),将单位参数换算为实际值,做出桨叶角度和流量(或力矩)关系的拟合曲线,其斜率即为相应工况的eqz(或ez)。
(3)水轮机流量(或力矩)对水头传递系数 eqh(或 eh)。根据(1)中取出的交点,计算得到(Q11,n11)(或(M11,n11)),将单位转速换算为在额定转速时的水头,做出水头和流量(或力矩)关系的拟合曲线,其斜率即为相应工况的eqh(或eh)。
(4)水轮机流量(或力矩)对转速传递系数eqx(或ex)。根据(1)中取出的交点,计算得到(Q11,n11)(或(M11,n11)),将单位转速换算为在不同水头时的转速,做出转速和流量(或力矩)关系的拟合曲线。水轮机并网后运行在额定转速,该点斜率即为要求的eqx(或ex)。
相比两点法计算指定工况点的传递系数,曲线拟合法计算量小,程序上也容易实现,但对于不同类型的传递系数,拟合函数的类型和阶次应有所差别。通常曲线拟合法采用二次或三次多项式,难以做到对所有的传递系数都能达到最优拟合,甚至可能出现过拟合,这都将给计算结果带来误差。
3 水轮机神经网络模型
3.1 基于神经网络的水轮机模型轴流转桨式水轮机有表示协联关系的模型综合特性曲线,以及多个定桨模型综合特性曲线。本文使用后者并结合边界条件建立轴流转桨式水轮机的神经网络模型,该模型的输入为单位转速、导叶开度和桨叶角度,输出则为水轮机单位流量或单位力矩。利用神经网络建立该函数关系的具体步骤如下。
(1)读取各个定桨模型综合特性曲线和飞逸特性曲线中等开度线和等效率线上的数据集,分别记为前者如图 2(a)圆点所示。
(2)对等效率线上的数据采用薄板样条插值法,得到拟合关系利用该关系计算等开度线上各个工况点的力矩,得到力矩特性的数据集如图 2(b)圆点所示。

图2 桨叶角度15°时的S水轮机运行特性的延拓
3.2 水轮机神经网络模型的延拓水轮机运行特性的延拓通常从3个方面考虑:零开度边界条件,零单位转速边界条件和飞逸边界条件。
(1)飞逸边界条件。可从水轮机飞逸曲线上获取一系列数据点如图 2(a)。机组飞逸条件下,水轮机输出力矩为0,效率为0,因此力矩特性的飞逸数据点为如图 2(b)。
(2)零开度边界条件。导叶开度为0时,无论机组有无转速,水轮机过流量为0,如图2(a)。此时水轮机单位力矩为负值,且与单位转速的平方成正比。在各单位转速下,对导叶开度和单位力矩的关系进行多项式拟合,解出零开度下的单位力矩。根据关系找到最佳的k值,并对数据进行适当调整,使之更符合实际规律[13],如图2(b)。
(3)零单位转速边界条件。单位转速为0时,机组没有转动,单位出力和效率均为0。单位流量和单位力矩可根据单位出力、单位转速和效率求得,但由于出现“0/0”型不定式,需借助洛必达法则(L’Hospital rule)求解[16],如式(1)和式(2)。

式中,单位出力和效率均可表示为单位转速的函数。
4 基于神经网络的水轮机传递系数
水轮机神经网络模型本质上是一多元函数,根据水轮机传递系数的定义式,对该函数求偏导数可以实现计算水轮机传递系数的目的。具体步骤如下:
(1)根据水轮机特性曲线构建神经网络,得到水轮机输入和输出参数的函数关系为


式中:fq1和 fm1、 fq2和 fm2分别表示神经网络隐含层和输出层所采用的激活函数;wq1和wm1、wq2和wm2表示神经网络隐含层和输出层的权值;bq1和bm1、bq2和bm2表示神经网络隐含层和输出层的阈值。
(3)对上一步的函数关系求偏导数,得到传递系数的一般表达式。以水轮机流量对水头传递系数为例,有

此外,由于神经网络训练之前一般需要对数据进行归一化处理,因此神经网络的输入输出和实际值并不相同。若采用最大最小值法,则呈 y=kx+b的线性关系,其比例系数和截距应在神经网络求导公式中有所体现。
5 实例及对比研究
研究表明:BP神经网络在水轮机非线性建模中具有较高的精度。因此,本文采用BP神经网络[18]建立轴流转桨式水轮机非线性稳态模型。经过比较,采用含有一个隐含层的神经网络结构,流量和力矩特性神经网络的隐含层神经元数分别为8和10,激活函数均采用logsig函数,输出层激活函数为线性函数。神经网络性能评价函数采用均方误差MSE,训练次数为1000。为保证训练效果,本文将全部样本分为3类:训练样本(80%)、验证样本(10%)和测试样本(10%)。神经网络训练方法采用LM算法(Levenberg-Marquardt algorithm)[19-20],该方法兼具梯度下降法和高斯牛顿法的优点,可以保证迭代过程的误差性能总是减小的。表1给出了本文建立水轮机神经网络模型所使用的部分样本数据。
延拓后的神经网络训练结果如图3。可以看出,流量特性神经网络的性能在训练200次后稳定,均方误差为3.92×10-5;力矩特性神经网络的性能在训练500次后稳定,均方误差为1.45×10-5;3类样本的均方误差变化保持了较好的一致性,表明训练过程中没有发生明显的过拟合现象。根据神经网络的总体误差,网络预测值和实际值基本一致。流量特性的各个样本误差多数限制在±0.02,少数样本误差位于±(0.02~0.04);力矩特性的各个样本误差多数限制在±0.05,少数样本误差位于±(0.05~0.1)。根据神经网络绘制水轮机流量特性和力矩特性曲面,如图4。可以发现,神经网络拟合曲面除了在运行工况区有较好的逼近效果,在边缘处也符合实际的边界条件。
需要指出的是,零转速边界条件的确定涉及函数求导,对曲线拟合精度要求很高,为了减少因此带来的误差,本文对水轮机运行特性的延拓仅考虑零开度和飞逸边界条件。
为了验证神经网络求导法计算水轮机传递系数的有效性和精度,本文将两种神经网络模型(延拓和未延拓模型)与多项式拟合法进行对比,结果如图5—图9所示。

表1 建立水轮机神经网络模型的部分样本数据(原始数据)

图3 考虑延拓的S水轮机神经网络的性能变化及总体误差
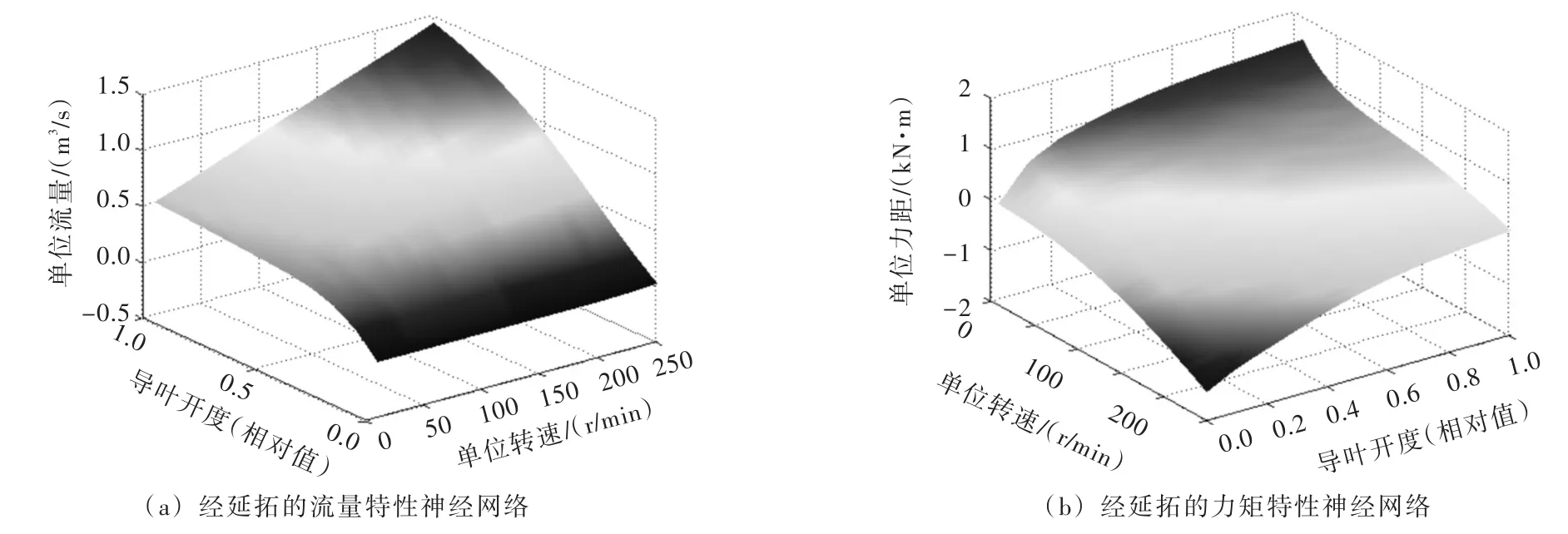
图4 桨叶角度15°时经延拓的S水轮机神经网络模型
(1)在额定水头、桨叶角度15°时,水轮机流量(或力矩)与导叶开度之间的关系,以及相应的传递系数eqy(或ey)见图5和图6。可以看出,未延拓的神经网络拟合效果和多项式拟合基本一致,计算的传递系数在远离端点处差别不大。延拓的神经网络由于受到边界条件的限制,其拟合曲线在导叶开度相对值为0.3时开始与前两者分离,该处的传递系数偏大,右端点同样如此。根据计算结果,当导叶开度位于50%~90%的范围内,采用三种方法均可得到较为准确的传递系数。当导叶开度小于50%或大于90%时,受边界条件的影响,采用延拓的神经网络求取水轮机传递系数更为合适。
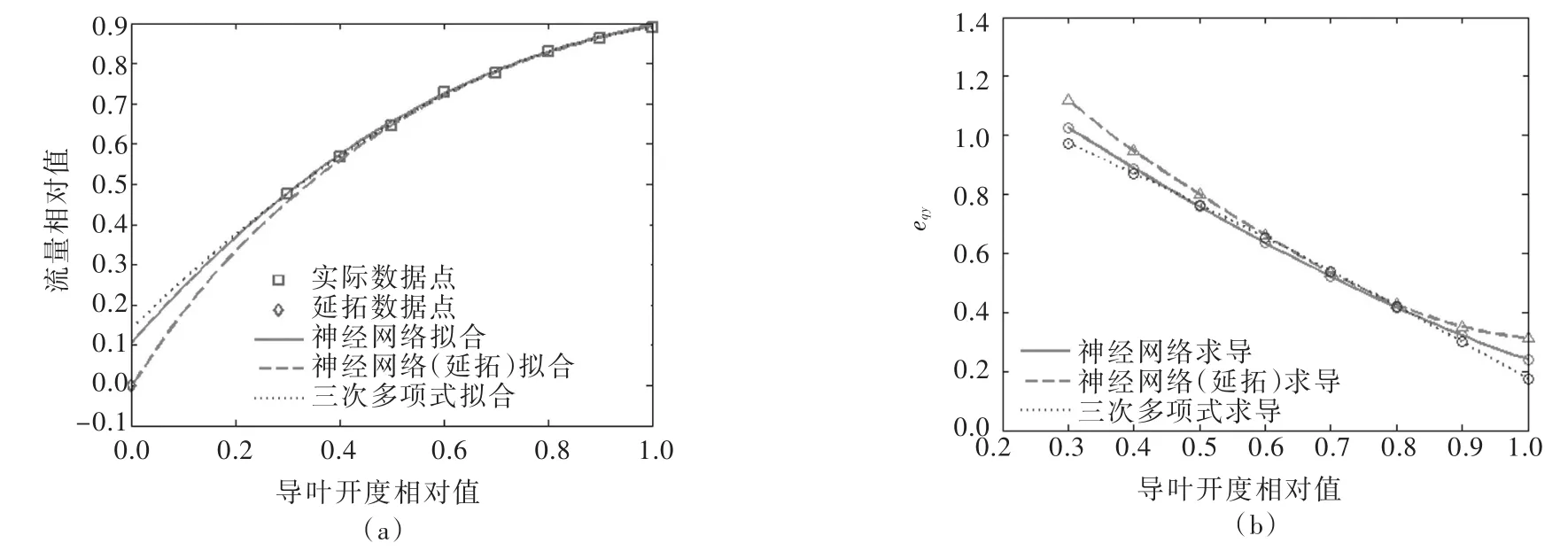
图5 3种方法的拟合结果和求取的传递系数eqy(额定水头,桨叶角度15°)
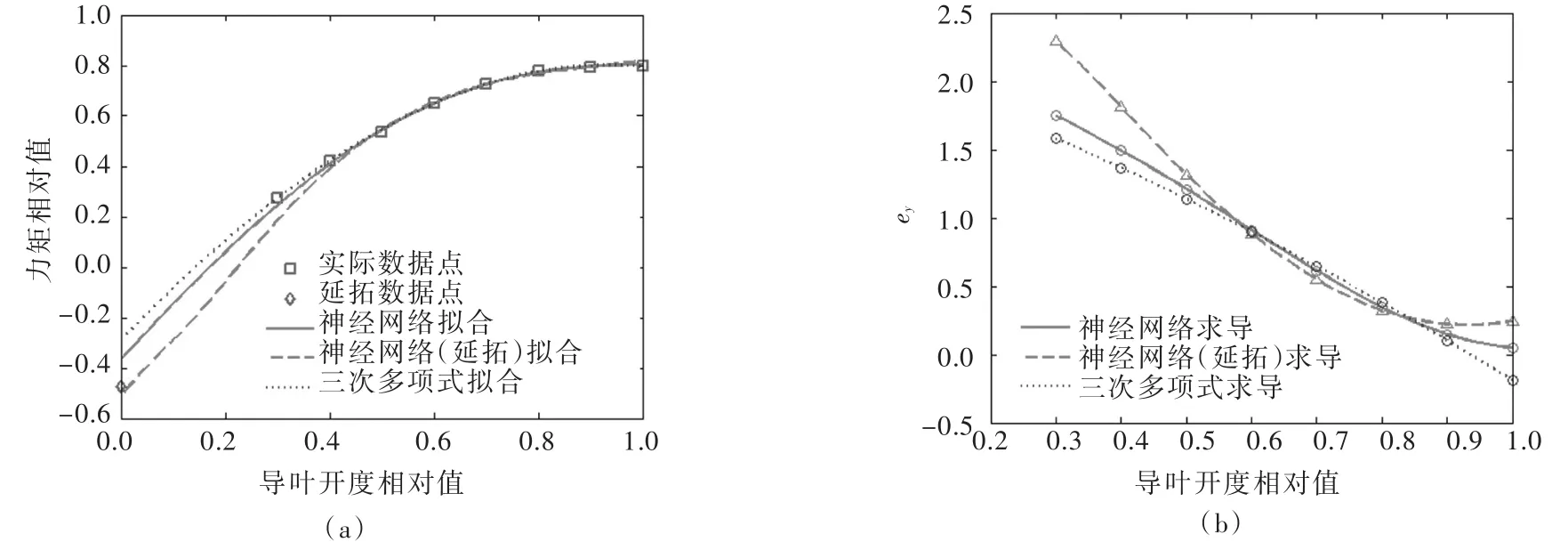
图6 3种方法的拟合结果和求取的传递系数ey(额定水头,桨叶角度15°)
(2)在额定水头、导叶开度为60%时,水轮机流量(或力矩)对桨叶角度的传递系数eqz(或ez)见图7。可以看出,由于没有桨叶角度的边界条件限制,三种方法计算的eqz(或ez)值非常接近,且变化规律一致。此时无论采用哪种方法,都能计算出相对可靠的传递系数。然而,桨叶角度的数据相对较少,且变化规律有时并不符合高次多项式,这会降低曲线拟合法的求解精度。

图7 3种方法求取的传递系数eqz和ez(额定水头,导叶开度60%)
(3)在导叶开度为80%,桨叶角度为15°时,水轮机流量(或力矩)对水头的传递系数eqh(或eh)见图8。这里的水头是以额定转速折算得到的。图中,未延拓的神经网络在左端点处的传递系数eqh与其他两种方法有明显差别,但相比图5—图7,曲线斜率的变化幅度更小。同样地,虽然两种神经网络计算的eh直观上与多项式求导的结果有很大不同,但表2显示出三种方法的计算结果基本一致。由于实际数据点的分布规律近似呈一条直线,斜率变化不大,神经网络的求导结果更为合理。

图8 3种方法求取的传递系数eqh和eh(导叶开度80%,桨叶角度15°)

表2 不同方法求取eh的计算结果对比
(4)在导叶开度为80%,桨叶角度为15°时,水轮机流量(或力矩)对转速的传递系数eqx(或ex)见图9。由于机组并网后运行在额定转速附近,边界条件(由于坐标限制,图中没有画出飞逸特性)对该处传递系数的影响不如(1)中明显,延拓的神经网络在计算结果上与其他两种方法差别不大。在偏离额定转速较多时,未延拓的神经网络与多项式求导法计算所得的传递系数及其变化更为接近,但由于二者未考虑边界条件,计算结果会有一定偏差。

图9 3种方法求取的传递系数eqx和ex(导叶开度80%,桨叶角度15°)
最后,本文对上述方法得到的传递系数随工况变化的规律进行了研究。图10表示在不同水头下,eh随导叶开度的变化情况。神经网络求导法得到的传递系数变化规律清晰直观,eh随导叶开度增大呈先增大后减小的趋势;多项式求导法得到的变化规律不够清晰甚至毫无规律。
6 结论
本文提出了利用神经网络求导计算水轮机传递系数的新方法,实现了水轮机非线性模型和线性模型之间的有机转换。神经网络求导法有效克服了传统方法的缺点,既保证了计算精度,又减小了计算量。试验结果表明,通过该方法得到的水轮机传递系数理论上包含了所有的水轮机工况,即使在数据不足的情况下,依靠神经网络的泛化能力,依然能够对传递系数进行有效求解。同时,该方法得到的传递系数随工况的变化遵循一定规律,可为研究水轮机动态特性提供重要的指导和理论依据。
猜你喜欢
大电机技术(2022年3期)2022-08-06
大电机技术(2022年2期)2022-06-05
建材发展导向(2021年13期)2021-07-28
水电与新能源(2020年12期)2021-01-07
装备制造技术(2020年4期)2020-12-25
水电站机电技术(2020年8期)2020-08-28
模具制造(2019年4期)2019-06-24
固体火箭技术(2018年6期)2019-01-18
测控技术(2018年2期)2018-12-09
振动工程学报(2015年2期)2015-03-01
