
基于混合动力的汽车发动机建模方法
2018-10-10 05:16王飞
长春工程学院学报(自然科学版) 2018年3期
王 飞
(安徽农业大学经济技术学院,合肥 230000)
0 引言
随着现代科技的飞速发展,各行业能源消耗量也在不断增加,能源环境问题已经逐渐凸显。针对这一情况,混合动力汽车逐渐成为未来汽车工业的主要研究方向。发动机作为混合动力汽车主要的驱动装置,其模型建立技术的研发,直接影响到混合动力汽车整体研究设计工作。与传统汽车发动机建模方法不同,混合动力发动机的电耦合动力系统结构,决定了发动机可以和其他动力源相互配合,这就意味着混合动力发动机所面对的工况与传统发动机完全不同,其工作循环也具有鲜明独特性。此外,由于混合动力机车本身的运行特殊性,只能装配以转矩结构为基础的发动机模型。由此可见,利用完善的建模技术,制作出合理的混合动力汽车发动机模型,对于混合动力汽车开发具有重要意义[1]。
1 混合动力汽车发动机基础模型建立
1.1 发动机参数分析
本次研究所使用的混合动力汽车发动机是美国ATT-GRO汽车制造企业生产制造的PORWER_078型发动机,其主要技术参数见表1。

表1 发动机参数表
1.2 整机模型建立
根据本次研究的混合动力发动机内核参数和实际发动机结构参数,结合其物理热力学模型,在PC端利用GT软件,可以对发动机建立基础模型[2]。该模型包括发动机的燃料供给系统、进气系统、气缸系统、涡轮增压系统、排气系统、内核曲轴箱等。整体结构如图1所示。
1.3 基础模型有效性测评
为了保证基础模型建立的有效性,在标准大气压下,对模型仿真数据和真实数据进行对比。基础发动机进行全负荷速率运转与部分负荷速率运转均可以利用基础发动机的节气门开度和转速函数表示,如式(1):
Te=f(a·n),
(1)
式中:Te为基础发动机的实际输出转矩(N·m);a为发动机转速(r/min);n为发动机气门开合角度。确定真实值后,利用GT模拟软件,把基础发动机节气门角度和转速共同建立的平面二维空间,分割成间距相等的网格,在网格点中,基础发动机节气门开启角度和转速的坐标向量可以由式(2)~(3)确定[3]。
(2)
(3)
式中:a2和a1分别为基础发动机气门开启角的最大角和最小角;n2和n1分别为基础发动机的最大核定转速和最小核定转速;Δa和Δn即为坐标向量。最终二维图如图2所示。
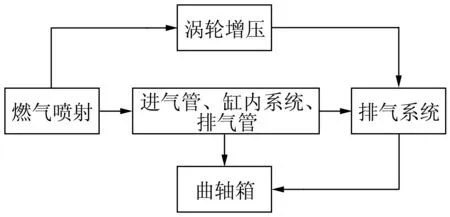
图1 基础发动机结构图

图2 基础模型对比图
根据图2的实验数据显示,基础模型和真实发动机的最大误差不会高于5%;基础发动机模型的最大输出力矩可以达到1 280 N·m;平均输出力矩可以达到750 N·m;最高转速可以达到1 400 r/min。发动机正常输出功率不等,但跟转速呈正比例关系,值域范围为50~180 kW。模型仿真结果和真实结果相吻合,所以本次建立的基础模型稳定可靠,可以用于后续的模型建立。
2 基础模型动力性仿真
混合动力汽车基础模型建立后,需要对其进行基础模型动力性仿真,为了确保仿真效果的真实性,本次研究共选取15种不同发动机转速,作为仿真测控点,进行动力性仿真。在不同的仿真转速点记录转速值,其结果见表2。
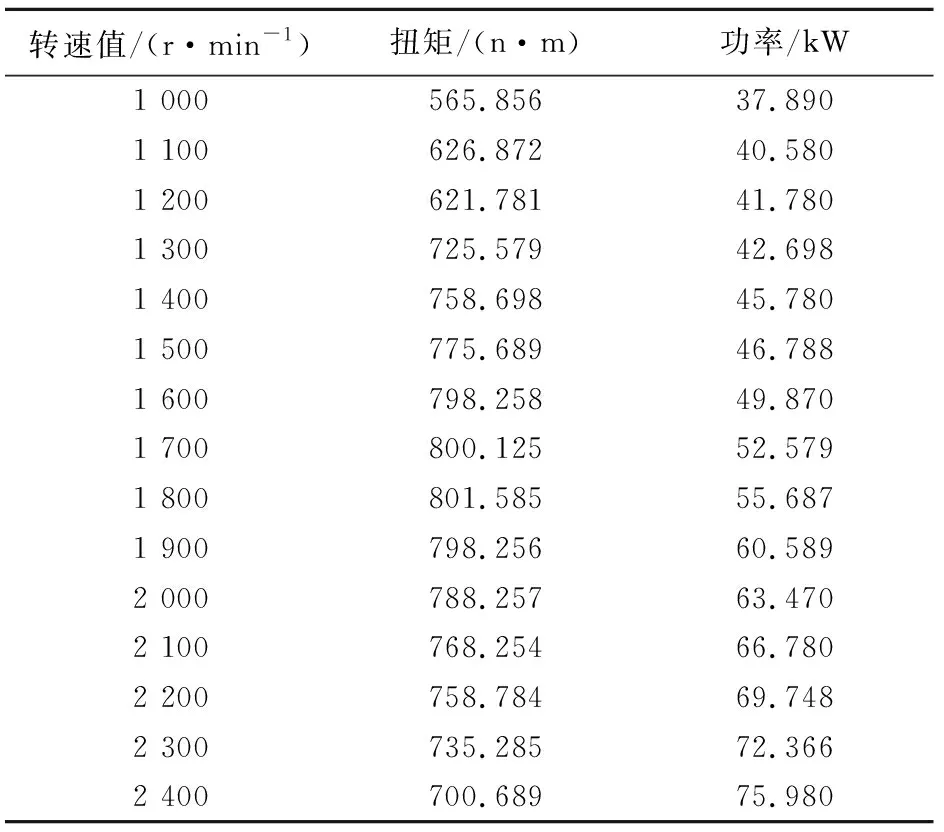
表2 转速仿真表
根据表2所记录的基础模型的动力性计算结果,可以综合测评基础模型的仿真性能。为后续神经网络建模升级,提供数据支持。
3 混合动力汽车神经网络建模
人工神经网络主要是指:通过现代化技术仪器或者PC端软件,对生物的体态神经结构和功能进行三维模拟分析,然后作用于工程开发或者某些零件的计算或者模型建立上。利用人工神经网络,可以动态地模拟出许多复杂动作之间的非线性关系,而且具有极强的后期改造性和适应性,可以应用于未知因素较多的应用系统中。本次基于混合动力的汽车发动机建模方法研究选取的是复杂化三层结构的神经网络,主要包括指令层、过渡层(中间层)和输出层[4]。详细如图3所示。
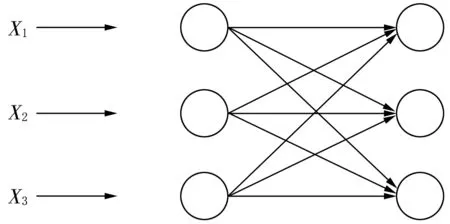
图3 神经网络结构图
图中,X1、X2、X3为3类神经层。上下层之间全部串联,但是每层中的每个神经元之间并无连接。当基础模型样本被提交给神经网络后,各种参数会被复制记录,神经元生成激活值,从指令层经过过渡层,再转移到输出层,进行3层参数行为模拟。输出层的神经元则负责各类相应参数和网络输出。参数传输完毕后,神经网络会自动从输出层开始,不断进行参数削弱,减小目标参数与实际参数的误差,并从输出层经过过渡层和指令层,逐层修改连接权限值,最后回到输入层,神经网络模拟宣告结束[5]。
3.1 神经网络结构和函数值确立
现阶段大多单一行为,均可以通过神经网络中的过渡层实现模拟。因为单一行为所模拟的输入相连因素唯一,与之相匹配的输入神经元也只有一个;同理,因为输出向量也只有一个,所以输出层的神经元同样唯一。现阶段的神经网络过渡层最多可以构筑5~9个神经元。为了验证神经元的数量对神经模拟结果的影响作用,分别选择4~10个过渡层神经元进行基础模型神经网络建模,验证公式如下:
(4)
式中:m为连权值;j为神经元个数;dj为对应神经元的行为模拟量;yj为对应神经元的网络性能。
3.2 神经网络样本数据
为了验证本次设立的神经网络模型的可用性,选取20组真实发动机转速和扭矩值,利用神经网络函数,进行实际建模。20组数据中,前15组为实际模拟样本,剩下5组为抽样测试样本,用于检测神经网络的偶然性。每组数据中,发动机实际转速为函数自变量,也就是神经元输出值;转矩为函数因变量,作为神经元输入值。此外,本次验证还对所有实验数据进行变量归元处理,所有样本数据均包括本体数据和归元数据,见表3。
根据之前设计的神经网络模型结构和求得的神经网络样本数据,结合模拟出的基础模型,使用PC端Matlab软件可以实现网络模型建立。通过不断改变过渡层神经元的个数和仿真模拟,可以确定,当过渡层神经元为7个时,仿真训练模拟效果最出色。此外根据实际实验模拟可以肯定,当模拟训练次数超过800次时,网络模型性能参数可以达到1×10-5量级,符合仿真要求。
4 发动机模型生成
为了让基础发动机更好地适应神经网络应用,对混合动力机车可以做到有效操控,在发动机模型生成前,需要将神经网络结构进行SLAM模块转化,然后进行模型生成。在MATL软件中输入命令:prommer(help_etbp,-1)即可自主生成SLAM模块。因为对神经网络数据已经做出了归元处理,所以只需要对所有模块数据的数据前缀进行数字记录,即可完成建模。

表3 神经网络数据表
5 结语
混合动力机车发动机建模,是机车开发与制造的核心技术之一。因为发动机本身的建模理论多样,数据结构驳杂,所以应用实验直接验证具有最直观效果。通过先建立基础模型,再得出动力性仿真数值后,进行神经网络运动模拟,最终通过模拟值和Matlab软件,生成SLAM模块完成建模。这种建模方式经过大量的实验检验和数据参考,具有极强的适用性,事实证明可以进行后续推广研究。
猜你喜欢
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
电子制作(2019年19期)2019-11-23
现代装饰(2018年5期)2018-05-26
故事作文·高年级(2017年10期)2017-10-19
小学阅读指南·低年级版(2016年1期)2016-09-10
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
电源技术(2015年5期)2015-08-22
中国生化药物杂志(2015年4期)2015-07-07
弹箭与制导学报(2015年1期)2015-03-11
