
打磨工业机器人轨迹规划仿真
2018-11-09 08:07田国富郑博涛
重型机械 2018年5期
田国富,郑博涛
(沈阳工业大学 机械工程学院,辽宁 沈阳 110870)
0 前言
传统方式加工出来的零件往往都有飞边、毛刺等表面缺陷,为了得到最终的产品还要对这些缺陷进行打磨处理[1]。当前,我国还是主要以人工方式来打磨工件,这样不仅生产效率低、工件表面一致性差,还会由于打磨环境恶劣对工人的健康造成影响。随着工业机器人技术的不断突破,未来使用机器人代替人工打磨就成了趋势,为了研究打磨机器人的轨迹规划,本文以FANUC公司的R-2000iB/165型号机器人为打磨设备,通过使用MATLAB软件中的机器人工具箱对打磨轨迹进行规划研究。
1 机器人坐标系及D-H参数
R-2000iB/165(图1)是六自由度工业机器人,由6个旋转关节及连杆组成,根据机器人的结构,通过D-H法建立机器人坐标系(图2)。

图2 机器人连杆坐标系
使用参考文献[1]中的方法确定D-H参数见表1,关节转角θi、连杆扭角αi-1、连杆长度ai-1和连杆偏距di[2]。

表1 机器人D-H参数

2 机器人三维建模
通过调用MATLAB中机器人工具箱中的函数[3-6],对R-2000iB/165机器人进行三维建模,具体的MATLAB程序如图3所示。

图3 机器人三维建模
其中Link函数中的参数分别为连杆扭角、杆长、关节转角、连杆偏距与使用标准的D-H参数,调用robot函数将所有的连杆连接起来构成一个整体,调用drivebot函数弹出机器人关节驱动器如图4所示,通过滑动滑块即可将机器人运动到指定的位姿。
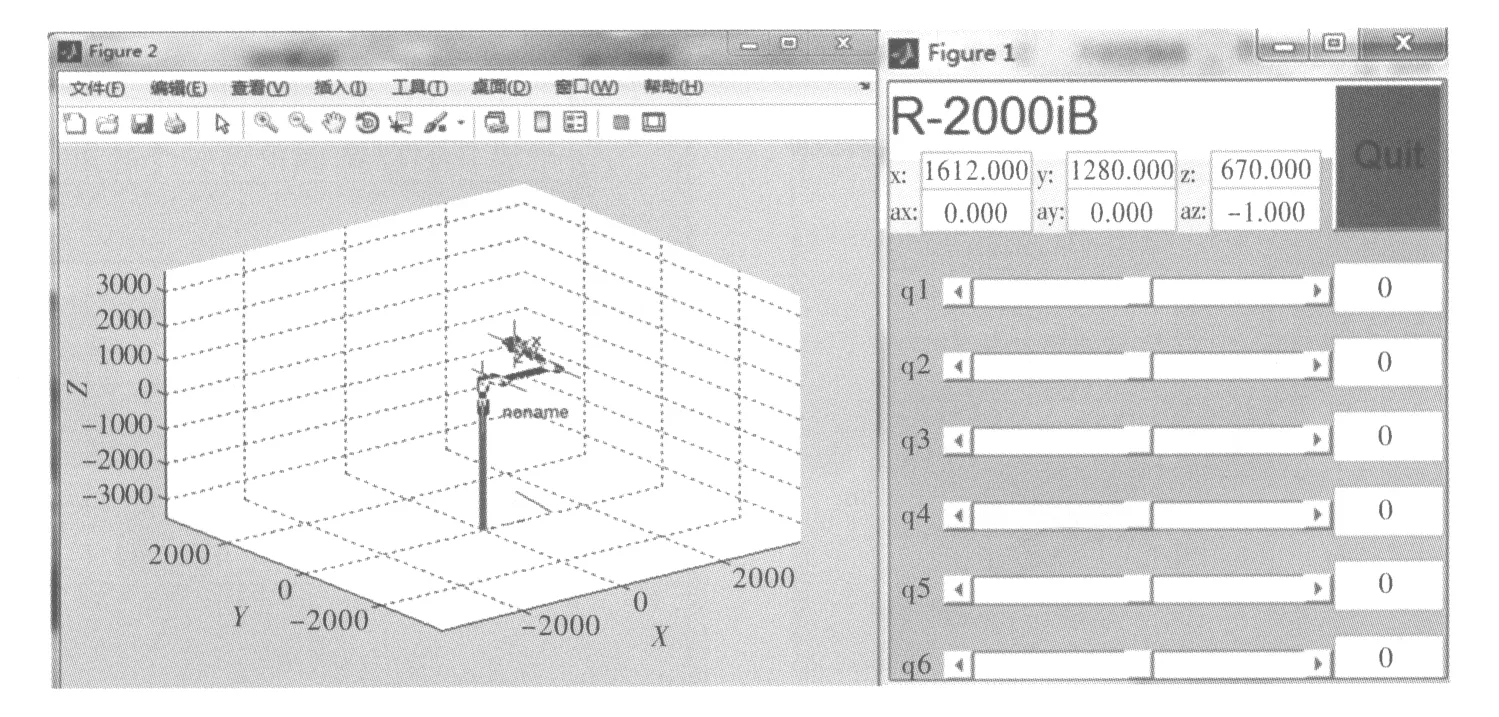
图4 机器人三维模型
建立完机器人三维模型建立后便可进行机器人轨迹的规划研究。
3 基于Robotics Toolbox的轨迹规划仿真
轨迹规划包括关节空间规划与笛卡尔空间规划两种轨迹规划,不同空间的轨迹规划具有不同的优缺点。关节空间轨迹规划具有计算量小、不会出现奇异现象的优点,但机器人末端在空间中的运动轨迹是未知的。笛卡尔空间轨迹规划具有运动路径直观的优点,但难以确定在运动过程中是否会发生奇异的现象。要使机器人能够平稳的运动,不论哪种规划,都要求运动轨迹是光滑连续的[7-10]。
3.1 关节空间轨迹规划
为了在关节空间中规划机器人的运行轨迹,需要设定下运动初始点与终止点,取初始点q1=[0 0 0 0 0 0],终止点q2=[pi/4 pi/5 pi/6 pi/4 pi/3 pi/5],设定运动时间为2 s,为了方便仅对关节1和关节2进行研究,其MATLAB程序如图5所示。
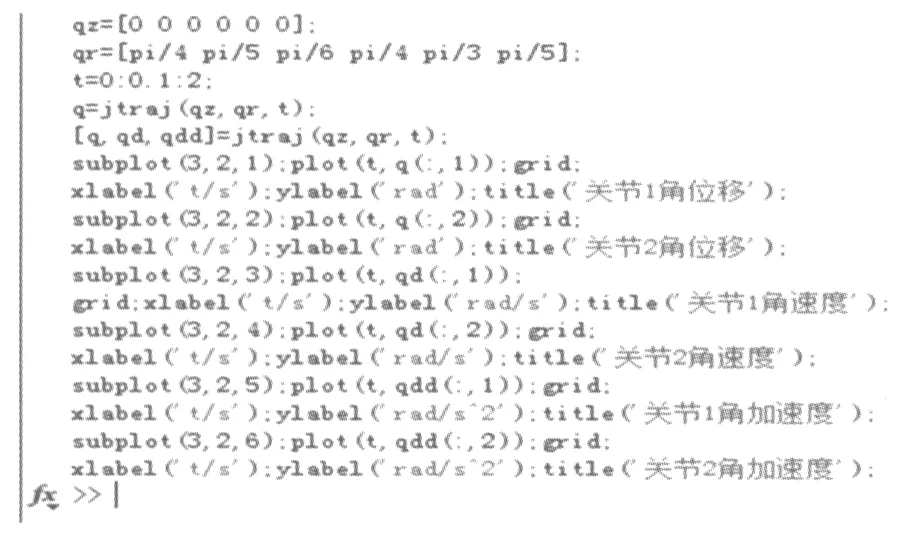
图5 关节空间轨迹规划程序
调用jtraj函数可对关节空间进行五次多项式插值,调用plot(t,q(:,i))、plot(t,qd(:,i))和 plot(t,qdd(:,i))可分别得到各个关节的角位移曲线、角速度曲线和角加速度曲线。运行程序即可得到关节1、2的角位移、角速度和角加速度曲线,如图6所示。
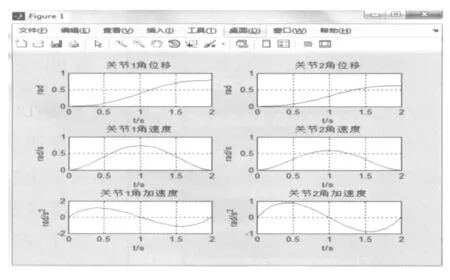
图6 关节角位移、速度、加速度曲线
观察图6可以发现机器人在运动过程中角位移、速度、加速度曲线都光滑平稳,说明机器人各个连杆没有发生错位的现象,角位移从初始位置随着时间运动到终止点的位置,角速度从零运动1 s左右达到最大速度后又逐渐减为零,角加速度先正后负正好对应上速度先增大后减小,因此该关节空间轨迹规划是较为合理的。
3.2 笛卡尔空间轨迹规划
本文以空间直线为例进行轨迹规划,在笛卡尔空间进行轨迹规划时同样需要设定初始点与终止点,取初始点T1=transl(78,171,1953,093,123,915),终止点T2=(387,872,1920,068,880,126),运动时间也设定为2秒,轨迹规划MATLAB程序如图7所示。

图7 笛卡尔空间轨迹规划程序
调用工具箱中的ctraj函数可以在笛卡尔空间轨迹机器人运动轨迹,调用plot(t,Tj(:,i))函数可以得出机械臂末端的三维空间坐标,如图8所示。

图8 机器人末端三维坐标
通过程序语句plot3(Tj(:,1),Tj(:,2),Tj(:,3))即可画出机械臂末端在空间中的运行轨迹,如图9所示。

图9 机器人末端空间运动轨迹
为了确定该轨迹规划是否合理,还需要观察机器人在运动过程中各个关节转角的变化情况,通过如图10中的MATLAB程序就可得到关节转角的变化曲线如图11所示。

图10 求各个关节角的MATLAB程序

图11 关节角度变化曲线
观察图11可以发现在笛卡尔空间进行轨迹规划时,各个关节转角没有发生突变,说明规划是合理的。
4 总结
利用MATLAB软件建立了机器人三维模型,在关节空间与笛卡尔空间进行了轨迹规划,通过轨迹仿真可以得出机器人的运动是平稳连续的,在机器人从初始位置(或开机位置)运动到打磨初始点时,由于这个过程不需要有精确的行走路线,为了节省时间,可对这个过程进行关节空间轨迹规划。当从打磨初始点运动到打磨终止点时需要机器人沿着精确到路径移动,这时就需要在笛卡尔空间进行轨迹规划,这样不仅提高了打磨效率,还提高了打磨质量。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
传奇·传记文学选刊(2021年10期)2021-10-20
小天使·一年级语数英综合(2021年3期)2021-05-08
装备制造技术(2020年2期)2020-12-14
商品与质量(2019年34期)2019-11-29
计算机系统应用(2019年3期)2019-03-11
汽车实用技术(2017年16期)2017-09-21
哲学评论(2017年2期)2017-04-18
现代计算机(2016年17期)2016-02-28
中国信息化·学术版(2013年1期)2013-05-28
