惯性卫星紧组合导航系统自主完好性算法研究
2018-11-21 03:59管春洋郭玉胜
导航定位与授时 2018年6期
管春洋,刘 洋,何 伟,郭玉胜
(北京自动化控制设备研究所,北京 100074)
0 引言
组合导航系统利用惯导、卫星导航接收机、气压高度表等多个硬件设备的信息,通过卡尔曼滤波器进行数据融合,实现长航时、高精度、高可靠性的导航[1]。
组合导航系统主要利用惯性导航系统和卫星导航系统进行数据融合,其中卫星导航接收机利用卫星信号进行导航信息解算,容易受到环境或人为因素的干扰,导致组合导航系统输出导航信息异常。国内外学者对组合导航系统的自主完好性检测算法及卫星导航接收机的故障检测算法进行了研究,设计了快照法,如最小二乘检测、奇偶矢量检测等方法,可以很好地检验突变故障[2-4];设计了自主完好性外推法,实现了对缓变故障的检测;对于组合导航系统而言,设计了基于卡尔曼数据融合滤波器的卡方检验法[5-6]。上述方法均是从接收机或者数据融合滤波器的角度进行故障检测[7-8],快照法存在无法检测缓变故障的缺点,自主完好性外推方法存在故障检出延迟和运算量大等缺点[9],卡尔曼滤波卡方检验法存在不能检出缓变故障等缺点[10]。
本文提出了一种组合导航系统自主完好性检测算法,在组合导航系统级利用气压高度辅助最小二乘检测算法,对卫星导航接收机突变和缓变故障进行检测。利用组合导航系统卡方检验方法进行故障识别,若为突变故障,对故障进行隔离;若为缓变故障,组合导航系统切换为纯惯性导航模式。该方案利用惯性导航、气压高度等冗余信息实现了对突变和缓变故障的检测和隔离,无需增加传感器,实现了组合导航系统在复杂环境下的高精度、长航时的导航定位。
1 组合导航系统故障分类
1.1 外部环境异常
卫星导航接收机利用导航卫星下发的电磁波信息进行定位和测速,卫星导航接收机和导航卫星都可能存在故障。常见的故障主要有卫星上的电子故障、卫星播发的星历与时钟模型错误、异常大气层延时、多路径及接收机故障等。在惯性/卫星紧组合系统中,卫星故障带来的后果表现为测量伪距值包含有故障等效偏差,并且由于量测量伪距差的变化,影响了导航的最终结果。
1.2 欺骗式干扰
欺骗式干扰信号可以正常地被卫星导航接收机捕获与跟踪,并参与到卫星导航接收机的定位解算中。通过更改星历或者调整信号发射时间来达到干扰定位结果的目的。欺骗式干扰通常又分为生成式干扰与转发式干扰,生成式干扰通过生成特定的卫星导航信号来达到干扰定位结果的目的。而转发式干扰则通过转发真实的卫星信号干扰伪距跟踪结果来达到干扰定位结果的目的[11]。
2 组合导航系统故障检测算法
组合导航系统采用最小二乘残差法[12]对卫星的伪距进行故障检测,本文提出的气压高度辅助最小二乘残差法实现了4颗星定位时的故障检测,输出定位结果的同时完成故障检测;同时组合导航系统的故障检测采用卡尔曼滤波残差法检验[13],实现了对突变故障的识别。
2.1 气压高度辅助的最小二乘检测算法
利用气压高度传感器修正后的气压高度进行卫星导航接收机的故障检测是可以满足精度需求的。气压高度辅助下的卫星导航接收机的故障检测算法是利用最小二乘残差法对接收机的自主完好性进行检测,对观测方程进行更改。
假设卫星导航接收机观测的观测方程如式(1)所示,则状态变量x的最小二乘解如式(2)所示。
y=Gx+ε
(1)
x=(GTG)-1GTy0
(2)
其中,G矩阵即为导航星座的雅克比矩阵,矩阵的最后一行为气压高度虚拟卫星的位置矢量,具体形式如式(3)所示。
(3)
结合式(3)推导得到伪距残差向量Δy如式(4)所示,其中S=I-G(GTG)-1GT为伪距残差协因数矩阵。
Δy=y0-y
=(I-G(GTG)-1GT)ε
=Sε
(4)
由于矩阵G(GTG)-1GT的秩为4,进而可以推导得到
(5)
其中,n为可观测卫星的数目,由式(4) 、式(5) 可得伪距残差Δy的平方和θ=ΔyT×Δy,如式(6)所示。
(6)
由以上推导再结合卡方分布的定义可知,若不存在故障卫星,即伪距误差服从正态分布,且满足E(ε)=0时,则伪距最小二乘残差的平方和θ的归一化变量θ/σ2满足以0为中心的自由度为n-4的χ2分布,其中σ2为伪距误差的方差。
当卫星存在故障时,设故障所引起的伪距误差矢量为b,如式(7)所示,其中,N为故障卫星的数量,伪距残差Δy改写为式(8)所示。
(7)
Δy=S(ε0+b)
(8)
此时伪距误差无法满足E(ε)=0,则结合χ2分布的定义,并结合之前的推导可知,此时伪距残差Δy的平方和θ的归一化变量θ/σ2,满足以λ为中心的自由度为n-4的χ2分布。
经过上面的计算完成了基于最小二乘残差法的气压辅助卫星导航接收机的故障检测,经过分析可知,气压辅助下的故障检测可以提高卫星导航接收机故障检测的冗余度。在卫星导航接收机收到4颗星时即可进行故障检测,当收到5颗及以上的卫星时就可以完成故障的排除,提高了卫星导航接收机故障检测的实用程度。在卫星导航接收机可以定位时就可以进行故障检测,提高了卫星导航接收机导航信息的可靠性。
2.2 组合导航系统卡尔曼滤波残差卡方检验
文献[1]中提出了一种基于组合导航系统卡尔曼滤波残差卡方检验法的故障检测数据融合算法,该算法利用新息构造故障检测函数实现对故障的检测。
将组合导航系统做分段线性化处理,得到如下的线性系统表达式:
xk=Φk/k-1xk-1+wk-1
yk=Hkxk+vk
(9)
式中:xk为n维状态向量;Φk/k-1为状态转移矩阵;yk为m维量测向量;Hk为量测矩阵;wk-1、vk为相互独立的白噪声向量。组合导航系统的卡尔曼滤波残差为:
rk=yk-yk/k-1=yk-Hkxk/k-1
(10)
式中:xk/k-1为状态一步预测值。正常工作时,卡尔曼滤波残差服从零均值高斯分布,其方差为:
=E[(yk-Hkxk/k-1)×(yk-Hkxk/k-1)T]
(11)
式中,Pk/k-1为一步预测方差阵;Rk为量测噪声阵。

(12)
系统正常工作情况下,βk服从自由度为m的卡方分布,即βk~χ2(m)。通过选择适当的误警概率PFA,可得到检测门限值Td。检测门限值Td与卫星数n和允许的误警率PFA有关。
(13)
根据χ2分布的概率密度曲线,设自由度为7,虚警门限PFA=0.01时,组合导航系统卡尔曼滤波卡方检验的概率密度函数如图1所示,可以得到故障检测门限为15.72。
卡尔曼滤波残差卡方检验法可以有效地对伪距跳变式干扰进行检测与识别,同时由于各个伪距观测量相互独立,在保证系统前一次没有故障的前提下,还可以有效地对多颗故障进行识别。但是对于伪距缓变式干扰,该方法则无能为力。当系统中存在伪距缓变式干扰时,伪距误差会影响状态预报值xk/k-1,状态预报值会对误差进行跟踪,导致有数据融合,滤波器得到的新息值rk较小,无法对其进行故障检测与识别。表1为故障检测算法的对比。
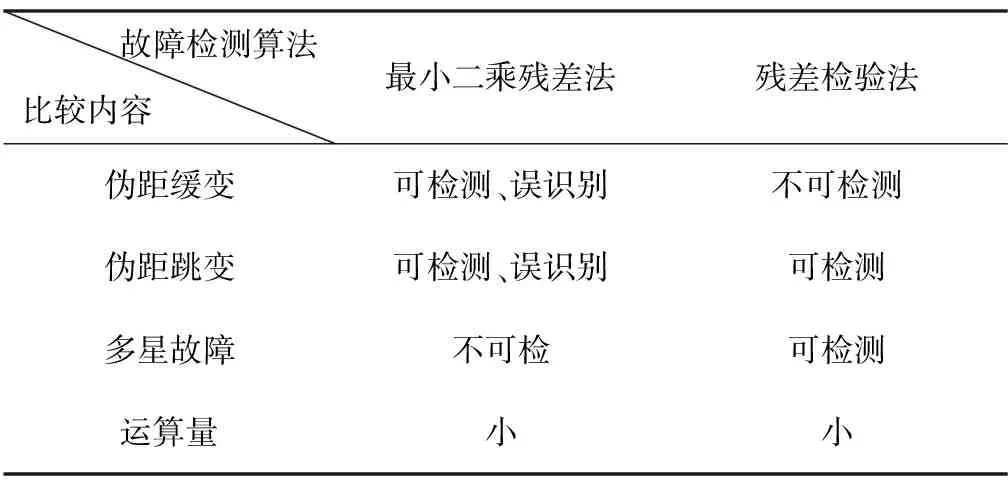
表1 故障检测算法对比
3 组合导航系统故障检测和识别算法工程实现研究
3.1 组合导航系统故障检测和识别算法研究
组合导航系统故障检测算法是充分利用已有算法的优点,结合紧组合导航系统运行的硬件基础进行的故障检测算法,设计了一种能够在工程上实现的组合导航系统故障检测和识别算法。故障检测模块采用气压辅助下的最小二乘残差法,突变故障识别算法使用卡尔曼滤波残差卡方检验法,保证故障识别的准确可靠;考虑到组合导航系统使用的实时性和硬件限制,基于自主完好性外推法的缓变故障识别方法在本组合导航系统上失去使用意义,当检出系统存在非突变故障时,组合导航系统切换导航模式,利用惯导系统进行纯惯性导航。紧组合导航系统故障检测算法流程如图2所示。
根据上文分析,故障检测模块中的最小二乘检测法可以较快地检测出故障[14],并且具有检出突变故障和缓变故障的能力。在故障消除或剔除后能够及时报出系统无故障信号,不受先验信息的干扰,实时利用当前时刻的信息进行故障的检测。所以最小二乘残差法非常适合作为组合导航系统的故障检测模块。缺点是最小二乘残差法需要5颗星才能检出故障,6颗及以上才能识别故障。根据第2节的分析,在气压高度传感器的辅助下,最小二乘残差法在4颗星时就可检出故障,卫星导航接收机满足定位条件就能进行故障检测,极大地提高了组合导航输出信息的可靠性。突变故障检出模块采用卡尔曼滤波器残差卡方检验法,根据卡尔曼滤波器的相关理论,利用卡尔曼滤波器新息构造的故障检测识别模块可以实时地识别出具体的卫星故障,从而为故障剔除模块提供信息。当突变故障检出某颗卫星存在故障后,则将该卫星剔除,然后继续进行最小二乘检测,保证进入数据融合滤波器的信息不存在故障。当检出非突变故障时,由于组合导航系统不具备剔除缓变故障的能力,为了保证导航信息的可靠性,则退出组合导航,利用惯导系统进行纯惯性导航。
3.2 组合导航系统故障检测和识别算法仿真验证
根据上文分析,结合组合导航系统常见的伪距突变故障和伪距缓变故障,利用最小二乘算法进行故障检测,并将最小二乘作为故障检出和故障消除的标志。利用组合导航系统卡尔曼滤波卡方检验识别具体伪距故障的卫星,然后将故障剔除后重新利用最小二乘残差检测算法进行故障检测,直至观测量中无故障,保证组合导航数据融合滤波器不被故障污染。
1)伪距突变故障检测和识别
利用组合导航系统实际收星数据进行复现仿真,组合导航系统全程收到7颗导航卫星,故障条件设置如下:
突变故障1,计算次数10~50时,2号卫星伪距跳变100m;
突变故障2,计算次数300~350时,2号卫星伪距跳变200m;
突变故障3,计算次数600~620时,1号卫星伪距跳变20m;
仿真结果如图3所示。
从图3中可以看出,当组合导航系统伪距存在突变故障时,组合导航系统在伪距跳变处存在位置误差较大的情况(50m左右),由此可见,伪距跳变对组合导航系统的导航定位影响较大。
根据图4所示,当系统存在仿真条件中设置的3个突变故障时,最小二乘残差法及时送出检测故障,并且在突变故障消除后,立刻消除检测故障,能够很好地检出突变故障,并在故障消除后及时报出无故障。
根据图5仿真结果可知,组合导航系统的卡尔曼滤波残差卡方检测在最小二乘残差法检出系统存在故障后,利用能够及时识别出2号卫星存在的2次较大的伪距突变故障和1号星存在1次较小的伪距突变故障。由此可见,卡尔曼滤波残差卡方检测能够及时地识别出具体的卫星伪距突变故障。
2)伪距缓变故障检测
在1)突变故障检测和识别的基础上,在四号卫星上添加缓变故障。
仿真条件设置:
突变故障1,计算次数10~50时,2号卫星伪距跳变100m;
突变故障2,计算次数300~350时,2号卫星伪距跳变200m;
突变故障3,计算次数600~620时,2号卫星伪距跳变20m;
缓变故障1,计算次数400~450时,4号卫星伪距缓变步长1m。
利用某组合导航系统机载试验数据进行复现仿真,组合导航系统全程收到7颗GPS导航卫星,并按照故障模式进行设置,仿真结果如图6所示。
从图6中可以看出,除去在3.1节中分析的对于突变故障的检出结果,重点关注系统在400~450s的步长为1m的缓变故障,当计算次数为412时,检测门限为1.189,已经超过检出故障门限(检测门限定位0.5,实际使用根据能够接受的虚警率[15]进行计算得到);在计算次数为450时,故障消除,检测门限立刻小于检出故障门限。可以看出,最小二乘残差法可以较为及时地检出系统的缓变故障,并且在缓变故障消除时能够及时地消除故障标志。
通过图7中的分析,在计算次数400~450s时的缓变故障,在紧组合导航系统卡尔曼滤波残差卡方检验结果中可以看出,该缓变故障相对于检出故障门限(检测门限设为0.5,只保留高位值,检测门限根据能够接受的虚警率计算得到)还相差较多,不能够满足故障检出的要求。因此,该方法不具备检出伪距缓变故障的能力。
经过上文最小二乘残差检验法和卡尔曼滤波残差卡方检验法对突变故障和缓变故障的检测和识别理论分析及仿真试验可以看出,最小二乘残差检测法对突变故障和缓变故障均有较好的检测能力,并且在故障消除后能够迅速消除故障报警。卡尔曼滤波残差卡方检验对于突变故障具有很好的检测能力,并能够准确识别故障星,给组合导航系统剔除故障星提供依据;但是该方法不具备对缓变故障的检测和识别能力,根据故障检测流程,当组合导航系统最小二乘故障检测检测到导航系统存在故障后,组合导航系统卡尔曼滤波残差卡方检验未识别出突变故障,组合导航系统退出组合导航状态,转入纯惯性导航状态,当最小二乘故障检测算法预警消除后,重新进入组合导航状态。
4 结论
针对现有的快照法故障检测算法和自主完好性检测算法进行优缺点分析,并结合组合导航系统外部故障的机理,从伪距跳变和伪距缓变方向入手,提出了一种能够利用气压高度辅助下的最小二乘残差法检测伪距跳变和伪距缓变的检测算法,并利用组合导航系统卡尔曼滤波残差法识别具体的突变故障算法模块。当无法完全剔除检出的故障时,组合导航系统及时切换成纯惯性导航状态,充分利用SINS系统不受干扰的优点,将纯惯性导航作为组合导航系统存在故障时的最可靠的导航方式,当存在未能识别的故障时,提高了组合导航系统在发生突变故障和缓变故障时的完好性。
猜你喜欢
临床肝胆病杂志(2022年6期)2022-11-25
地理空间信息(2022年10期)2022-10-31
北京航空航天大学学报(2022年8期)2022-08-31
汽车实用技术(2022年16期)2022-08-31
现代电生理学杂志(2021年3期)2021-12-05
导航定位学报(2021年5期)2021-10-13
北京航空航天大学学报(2021年7期)2021-08-13
导航定位学报(2021年2期)2021-04-22
数学学习与研究(2019年12期)2019-08-07
测绘通报(2019年3期)2019-04-03