通过脉宽调制对半球谐振陀螺组合进行精确温控的方法
2018-11-21 03:35齐轶楠荣义杰赵万良李绍良
导航定位与授时 2018年6期
夏 语,齐轶楠,蔡 雄,张 强,荣义杰,赵万良,李绍良
(1.上海航天控制技术研究所,上海 221116;2.上海市惯性工程技术中心,上海 201109)
0 引言
半球谐振陀螺组合作为卫星姿轨控系统的敏感器件,用于敏感卫星星体的惯性角速度,输出其在卫星坐标系上的分量,为卫星各个工作模式和飞行阶段提供连续的三轴惯性角速度信息。半球谐振陀螺是新一代惯性敏感元件,它的机械结构中没有经典陀螺中的高速转子和活动支承,避免了机械摩擦,具有测量精度高、稳定性强、抗辐射、长寿命等优点[1]。目前,从事半球谐振陀螺技术研究的国家主要是美国、俄罗斯和中国。其中,美国是最早研究半球谐振陀螺的国家[2]。随着我国航空航天等领域的空前发展,对高精度、高可靠、长寿命的陀螺提出了迫切需求[3],研制半球谐振陀螺对提高中国惯性器件水平具有重要意义。
半球谐振陀螺的敏感器部分全部由熔融的石英加工而成,包括谐振子、激励罩和读出基座3个元件[4]。谐振子受工作温度的影响,会引起陀螺漂移[5],主要表现在不同温度下启动的零位不一致、输出带有较明显的趋势项等[6]。热漂移是半球谐振陀螺难以避免的误差来源[7],故陀螺组合需要为陀螺仪提供一套精确的温控系统来满足高精度输出的需求[8]。本文通过建立半球谐振陀螺组合热模型,设计了一套高精度的温控系统来降低陀螺的热漂移对输出精度的影响。
工作于地球高、中、低轨道上的卫星舱内的单机工作温度范围为-10℃~45℃,单机一般通过结构件接触和表面阳极氧化处理两种方式进行散热。半球谐振陀螺组合结构件一般为硬铝合金2Al2,热导率为193W/(m·℃),具有较高的热传导性。为了保证热传导率,组合底座安装面有较高的平面度和较低的粗糙度,有时为了提高整星和组合安装面之间的导热率,可以在其间涂导热硅脂。在安装面和紧固件安装孔之外的组合表面进行阳极氧化处理,阳极氧化的表面处理可以提高金属表面的发射率,提升组合的散热能力。
1 温控方法
依据对半球谐振陀螺的高低温环境中零位数据的统计与分析,得知温控精度设置在±0.1°C能够有效保证陀螺的输出精度[9]。温控系统要兼顾实时性、有效性和灵活性,所以本文的温控采用数字方案,通过软件算法输出PWM波形来控制加热元件。温控电路主要由加热元件、温控电阻、测温电阻、采集电路、控制电路和驱动电路构成[10]。PWM控制方式的加温示意图如图1所示。
测温电阻安装在陀螺仪顶部,该处的温度点可以表征谐振子的温度。
若开机时的环境温度低于温控点时,陀螺的加热元件以全功率进行加热;当陀螺温度接近工作温度点时,温控进入调整状态;当陀螺温度达到工作温度时,系统的加热功率与热耗散功率保持动态平衡;如果陀螺温度超过温控点,则停止加热,通过自然散热促使系统降温。
2 均匀对称性结构设计
为了保证温控电路参数的一致性,就必须保证陀螺的安装位置和周围温度场分布均匀,由此提出了均匀对称性的结构设计。
半球陀螺组合整体结构图如图2所示,其中3个陀螺仪安装于互相垂直的侧面,一个陀螺仪安装于支架正上方。由此可以保证3个侧面的安装孔中心点保持在一个水平面上,从而使安装在侧面的3个陀螺仪的温度环境保持一致。
3 陀螺组合热模型
组合主要由4个陀螺、1个支架和电路板组成,所以系统热模型可以等效成图3的形式。其中,C1~C7表示各环节的热容量;P1~P6表示各环节上所施加(或释放)的功率;R1~R7表示各环节之间的热阻。
通过支架、底座和陀螺仪的质量和材料计算热容、热阻等参数得到组合的热模型参数如表1所示,其中,P表示为施加在各个节点的预计功率。表1中,控制电路板的热容量和热阻对热控系统影响不大,所以只给出估计值。

表1 热模型参数
4 温度特性分析和控制回路
4.1 温度特性分析
陀螺对于施加的功率,需经过一定的时间才能达到期望的温控点,根据惯性环节的特点:含有一个储能元件,对于突变的输入其输出不能立即复现输出无振荡。所以加热过程中,陀螺的温度特性可为一阶惯性环节,其传递函数可以表示为:
(1)
其中,TG为陀螺加热的时间常数,KG为增益系数。
物体的温度特性,一般是通过给物体加热,测量其温度变化曲线。再对测量温度值进行最小二乘拟合,拟合函数为
T=T0+K(1-e-t/τ)
(2)
其中,T0为初始温度值;K为放大系数;τ为时间常数;t为延迟时间。
4.2 温度控制回路
根据陀螺的温度特性,以及为了满足温控的精度和快速性的要求,所以采用软件PI控制形式PWM温控的方式。
温度控制回路的原理框图如图4示。
首先,热敏电阻将温度变化ΔT转变成阻值ΔR,再通过电桥将阻值ΔR转换成电压的变化ΔU。V/F转换器将ΔU转换成脉冲数f,积分时间为100ms。FPGA采集到脉冲数,然后进行PI运算,输出PWM波形控制MOSFET的通断,从而控制加热片的通断时间以达到温控的目的。
FPGA选用ACTEL公司ProASIC3系列中拥有100万逻辑单元的A3P1000-PQ208I,用户使用的I/O接口有154个。温控电路如图5所示,CD4051接收热敏电阻的电压信号,由VF转化为频率信号并送到FPGA中,通过FPGA运算产生各级温控PWM波形。
经过对控制对象的温度特性分析,得知其为一阶惯性环节,可以通过PI进行温度控制,温控FPGA程序方框图如图6所示。
5 验证
在实验室条件下,对温控系统进行测试,FPGA的采样速率为100ms,对4路陀螺同时进行温度控制。从0时刻开始加热测试至60min的温度数据如图7所示(横轴为采样点;纵轴为温度,单位℃)。
通过图7可知,温度曲线有明显的超调量出现,这样有利于快速的进入温控精度,同时也可以加快陀螺内部的传热。由表2可知,温控系统的温度稳定性为0.04℃2左右,温度的峰峰值也能保证在±0.1℃以内。
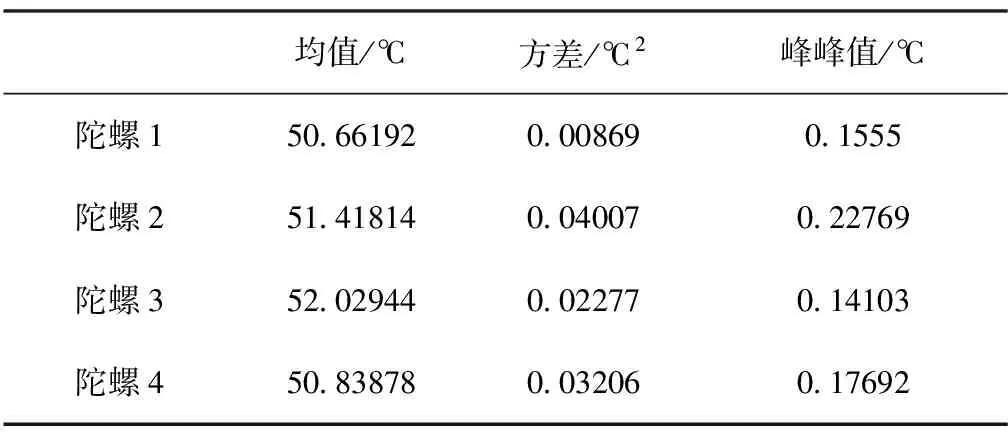
表2 温度数据处理
将温控系统通电1h后,再测试45min的数据如图8所示。
通过图8和表3可得,温控系统随着时间的推移,温控的温度稳定性和精度趋于收敛,整个温控系统能够稳定的运行。

表3 45min温度曲线参数
6 总结
由于半球谐振陀螺受温度影响产生的热漂移对陀螺组合的使用精度有很大影响,对陀螺仪提供恒温条件非常重要。本文对半球谐振陀螺组合建立了均匀对称的结构热模型,并设计了基于FPGA数字电路的温控回路系统。该系统采用脉宽调制的方式作用在陀螺仪的加热元件上。通过对陀螺组合实际温控系统的实验表明,温控的精度可达±0.1℃,保证陀螺工作环境温度稳定,以此降低陀螺的热漂移对输出精度的影响。
猜你喜欢
科技创新与品牌(2022年7期)2022-11-15
电力需求侧管理(2022年5期)2022-10-14
导航定位学报(2022年4期)2022-08-15
北京航空航天大学学报(2022年6期)2022-07-02
河南科技(2022年8期)2022-05-31
中国典型病例大全(2022年12期)2022-05-13
北京航空航天大学学报(2021年9期)2021-11-02
山东工业技术(2016年15期)2016-12-01
现代营销·经营版(2013年9期)2013-05-14
红领巾·成长(2009年10期)2009-12-02