真北方位基准标定与惯导测试设备引北技术
2018-11-21 03:35张耀民
导航定位与授时 2018年6期
张耀民
(西安科技大学,西安 710054)
0 引言
惯导产品在生产、测试、维修、使用的各个环节中,需要对其真北方位进行标校。通常需要在室内建立真北方位基准,并把真北方位引入到测试设备[1]。
根据需求,真北方位基准一般需要精确到1″~20″精度。由于室内定向场所空间大小的限制,需要采用特殊的工业测量方法进行定向才能满足精度要求。把室外方位传递到室内,如果采用传统的两点一线的测量方法,测量仪器对中误差哪怕只有0.1mm,则5m的传递距离可引起的方向误差高达4″。即便采用强制对中措施,这样尚需要建造仪器观测台,既费工,也存在对中误差,而且传统观测手段在室内还存在较大的调焦误差[2]。
目前涉及惯导产品和测试设备标校的室内真北基准论文尚不多见[3-6]。发表的论文主要侧重于利用天文定向方法建立用于陀螺经纬仪常数标定的室内外基准[7-10],其方位传递基本采用一站式天文定向方法或者分别观测转折角的方位传递方法,这种方法很难保证直接高精度传递到室内基准上;对于精度要求不高的真北基准标定和设备引北则采用陀螺经纬仪定向方法[11-12]以及全球导航卫星系统(Global Navigation Satellite System,GNSS)定向方法[2,13-15]。
文献[7]报道了用天文定向方法建立用于陀螺经纬仪常数标定的真北方位基准项目情况,一二期结果互差35″,其变化异常;文献[8]研究设计了陀螺经纬仪室内外真北基准检测方法,并通过联测比对了室内外基准互差,不过未见施加子午线收敛角改正,若改正反而会超限;文献[9]报道了在原有的室外基线场建立真北方位基准,采用了平行光管作为过度目标,观测过程中光管也会变化,而把平行光管对准目标点的过程中还需要调焦,使得视准线也发生了变化,另外采用天文定位方法获取天文经纬度的方法对于观测北极星进行天文定向是没有必要的;文献[13]利用传统方法布测了GNSS网和三角网,建立了室内真北基准地标,采用延伸转台轴线的方法进行了转台引北,属于传统两点一线的方法,精度低且工作量大。
因此,本文主要探讨了有关室内真北方位基准的建立和标定、惯导测试设备引北的高精度实用技术和方法,例如基于双测站的天文定向、基于同步网的GNSS定向、高精度经纬仪对向观测方法等,这些技术已在笔者20年来所完成的上百个此类项目中得到成功运用。
1 真北方位基准的维持与建立
为了惯导设备引北以及产品标校,一般需要在室内建立真北方位基准台,并在真北方位基准台上设置基准平面镜(精度高)、直角棱镜(维持精度有限)或者平行光管(适用非准直仪器),以便维持真北方位基准。真北方位基准台布设位置应方便观测和方位传递,且方位传递导线尽量不要超过2站。室外经纬仪能观测到的天体如北极星;室内外经纬仪能通过门或者窗户甚至玻璃相互通视;室内经纬仪能观测到基准镜面。
图1所示为一个典型的真北方位基准标定和转台引北布测方案示意图。
常见的惯导产品测试设备有:真北方位标定平台,单轴转台、双轴转台和三轴转台。惯导产品则通过固定托架、靠块或者定位销固定在测试设备上。在设备轴端和产品基面可以安装用于设备引北的引北镜。利用真北基准,通过测定引北镜的法向方位可以确定转台的零位置的真北方位设定参数和产品框架相对于转台的定向参数,这个过程即为设备引北。
2 真北方位基准标定方法
真北方位基准标定方法可根据精度要求选择采用天文定向、GNSS定向或是陀螺经纬仪定向方法。
2.1 双测站天文定向
建立高精度真北方位基准时,通常采用天文定向方法确定真北方位。根据精度要求可以选择观测北极星等恒星,以及行星、太阳、月亮等观测目标。在我国一般选择观测北极星可以获得最佳的天文定向精度,而天文观测一般需要在晴朗的夜晚进行观测。图2所示为基于双测站的天文定向方法,这种方法一般可满足室内基准高达±0.5″(我国大地天文测量规范规定的一等天文方位角测量中误差为0.5″)及更低精度的定向需求。
在室外进行天文定向时可参照文献[1]中的技术要求,采用北极星任意时角的天文定向方法,通过观测任意时刻北极星的水平度盘位置并记录观测时的协调世界时(Coordinated Universal Time,UTC),测定目标方向的天文方位角。
采用单测站天文定向方法很难引测到室内,为了把天文方位引测到室内基准上,一般需要采用双测站对向观测方法。每半测回把天体方位直接传递到室内镜面法向上,并顾及极移改正和子午线收敛角改正。
顾及经纬仪视轴差的高精度天文方位角观测可按式(1)计算方位角:
(1)
其中:
p=cscZR+cscZL
Z=arccos(sinφsinδ+cosφcosδcost)
t=15×(s-α)
式中:N为天体半测回度盘观测值;DA为一测回室内目标度盘位置均值;L为盘左度盘位置;R为盘右度盘位置;s为观测天体时刻的地方恒星时;α为顾及了周日视差和光行差的天体测站视赤经;δ为顾及了周日视差和光行差的天体测站视赤纬;φ为测站天文纬度。
天文定向需要已知天文经纬度,如果采用天文方法测定天文经纬度,则成本很高,最有效的方法是利用GNSS伪距定位方法获取测站的大地经纬度。如果利用北极星时角法进行天文定向,直接采用大地经纬度即可满足天文定向精度要求,如果采用行星和其他远离北天极的恒星进行高精度天文定向时,一般对天文经纬度精度要求较高,这时可以利用式(2)进行转换:
λ=L+ηsecφ
φ=B+ξ
(2)
式中:λ为天文经度;φ为天文纬度;L为大地经度;B为大地纬度;ξ为垂线偏差子午分量;η为垂线偏差卯酉分量。垂线偏差可利用重力场模型或者大地水准面模型进行计算。
由于采用双测站对向观测方法进行天文定向方位传递,在基准上测定了n测回独立的方位观测值,其天文定向的测定精度m评定可按式(3)计算。
(3)
式中:ms为各测回真北方位基准测定标准差;n为测回数。
2.2 GNSS同步网定向
高精度GNSS定向就是利用GNSS卫星静态载波相位相对定位方法测定方位角的方法。由于受GNSS接收机天线相位中心偏差和对中观测误差影响,定向精度与基线长度有关,顾及到垂线偏差和有限空间限制,一般适合精度为5″及更低精度的定向需求。这种方法除了需要GNSS接收机外,还额外需要天文定向同样所需的准直经纬仪,因此,这种方法并非比天文定向方法更经济,但基本不受天气影响。
为了提高定向精度和可靠性,削弱对中误差、相位中心偏差等影响,需采用布测多基线同步网的GNSS定向方法,同步网不少于3条基线,大约同步观测60min,并采用强制对中措施。
如图3所示,在同步三角网中,选择一点作为定向观测起始点,以2条基线作为定向观测起始方向,其起始方向的基线长度需要满足精度需求。
根据观测场所环境,GNSS定向起始方向的基线长一般应不小于:
(4)
式中:a为相位中心偏差;n为起始方位基线数,通常为2、3即可,d为定向精度;长度单位:m。一般来说天线相位中心偏差大约2~5mm,对于5″的定向精度需求,2个起始方向数的基线长度一般需要150m以上。
GNSS网经过基线解算和无约束网平差后,可按式(5)计算所需起始方向的基线矢量方位角(非椭球面上的大地方位角)[16-17]。
(5)
式中:ΔX、ΔY、ΔZ分别为基线矢量坐标差分量;B、L分别为起始点的大地经纬度。
根据需要,可按式(6)把大地方位角近似转化为天文方位角。大地方位角和天文方位角之差一般可达几个角秒甚至超过10″,其换算关系为:
a=A+ηtanφ
(6)
式中:a为天文方位角;A为大地方位角;η为垂线偏差卯酉分量,同样可利用重力场模型或者大地水准面模型进行计算;φ为天文纬度,可以用大地纬度代替。
最后采用2台经纬仪对向观测方法,把基线方位传递到室内基准镜面法向,并顾及子午线收敛角改正,注意在传递观测中采取不调焦措施。
对于2个测回的GNSS三角同步网定向精度m的评定,顾及GNSS观测误差、相位中心误差、定向引测误差后的方位基准的最终精度,可按式(7)计算。
(7)
式中:m01、m02分别为GNSS同步网1、2起始方位的测定中误差,m11、m12分别为1、2测回含有相位中心偏差的方位传递角度的测定中误差;m2为标定测站的角度测定中误差。
3 设备引北方法
设备引北方法一般采用经纬仪对向观测法、陀螺经纬仪定向法、水平仪定向法。这些方法基本都是相对的定向方法,也就是从已知方向引测方位的一种方法。设备引北一般需要有引北镜、平面镜、定向基面诸如产品靠块的支持。
3.1 经纬仪对向观测法
此法如同天文定向和GNSS定向中的对向观测法,用于从已知方向引测到未知方向,并需要利用准直经纬仪、对向观测经纬仪十字丝和镜面。当2台仪器不能直接引测到未知方向时,可增加1台仪器,或者改变观测顺序,通过搬迁仪器,进行后续定向导线的方位传递观测。需要说明的是,和真北方位基准标定一样,经纬仪需要对无穷远调焦,一个测回观测中是不能调焦的。此方法适用于转台轴向定向、真北方位标定平台定向、惯导产品托架定向、直角棱镜安装校准、转台轴向正交性和转动精度检测等。
3.2 引北镜校准
对于平面引北镜校准可以利用准直经纬仪或者准直平行光管,在2个相互对称的位置上进行准直观测,按照平均准直位置调节引北镜,使引北镜法向和转台轴向一致。对于引北镜法向和转台轴向较小的偏差,以及轴向回转偏差和非正交性偏差,可以通过观测加以修正。
对于用于维持真北方位基准的直角棱镜的安装,可采用如下方法进行直角棱镜的棱线水平性校准,以确保在不同高度上准直观测直角棱镜无显著偏差。如图4所示,分别在高点和低点两处安置经纬仪,利用双测站对向观测方法,检测棱镜棱线所处的水平状态,从而在不同高度进行准直观测,使棱镜准直视线的方位保持一致。其原理就是假设与棱镜等高处的经纬仪水平准直方位角为0°,那么经2台仪器联测后的棱镜方位应该也是0°。利用这一原理,通过反复观测调试,使得差值控制在一定范围之内。
4 主要应用实例
因篇幅所限,这里就笔者所完成的上百个真北方位基准标定和惯导设备引北项目中,列举天文定向、GNSS定向、转台引北、直角棱镜校准等4个典型应用实例加以说明。
4.1 天文定向实例
天文定向实测结果如表1所示,这是2017年7月20日在武汉,采用2台0.5″Leica TM5100A的标定结果,其均值中误差要求不超过1″,实测为0.4″。需要说明的是:本次结果与2013年底有关单位的标定结果互差+2.9″,与Gyromat 3000陀螺经纬仪现场测定结果(用在北京标定的常数计算)互差-3.5″,本次结果位居中间。
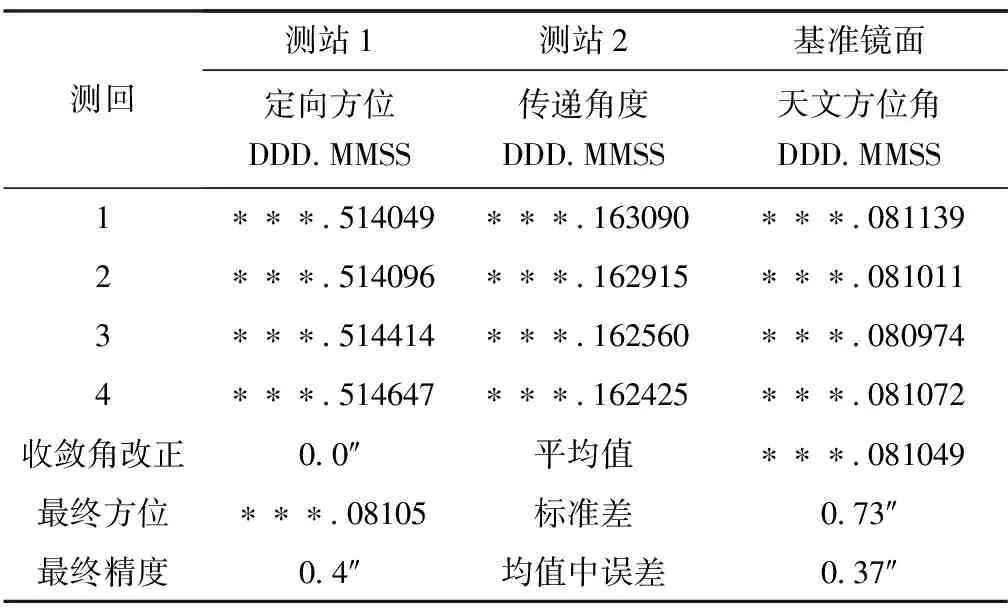
表1 天文定向实测结果
另外在2017年10月19—20日在葫芦岛,同样利用2台TM5100A仪器,经过2站天文定向传递、2个时段仅6测回,标定的室内2个平行光管目标和一个平面镜目标,其真北方位结果中误差分别高达0.17″、0.18″、0.20″,结果说明非常稳定。
4.2 GNSS定向实例
GNSS定向实测结果如表2所示,这是2016年10月20日在西安,采用国产2″光学准直经纬仪和GNSS载波相位接收机的定向结果,其精度要求为10″;根据场地情况布设为同步三角网,使得起始方位基线尽量更长,分别为161.9m、161.6m;为了克服对中误差的影响,采取了强制对中措施。表2中,m01=m02=1.02″,m11=2.98″、m12=1.76″,m2=0.84″,这样大地方位基准的标定精度约为:
其中,天文方位的转换精度约为1″,这样最终精度约为2.3″。
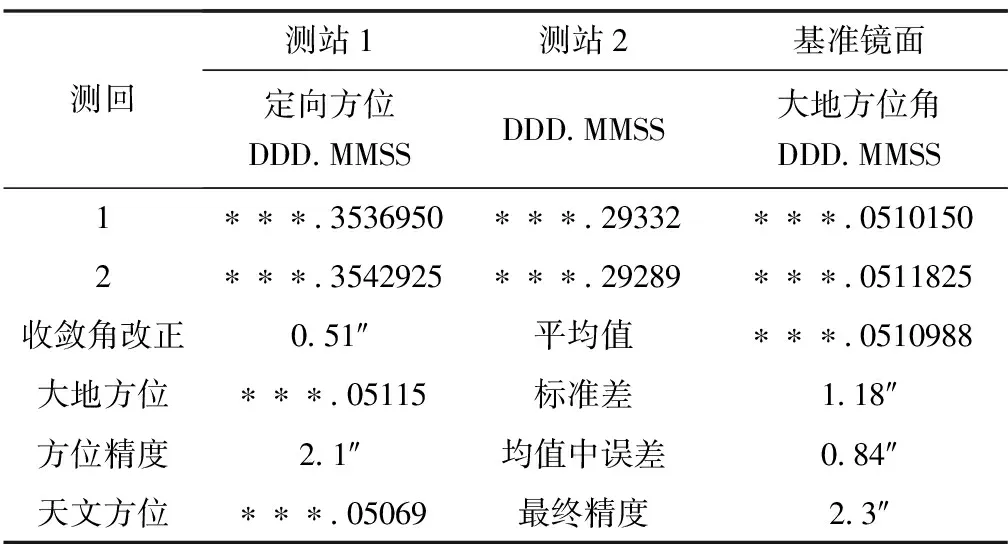
表2 GNSS定向实测结果
4.3 转台引北实例
转台引北实测结果如表3所示,这是2016年9月25日在广州,采用2″光学准直经纬仪对一个两轴温控转台内框轴向的引北结果,其转台内外框轴向引北精度要求为4″,实测结果顾及真北方位基准起算误差后的精度为1.6″。内框轴向定向是利用经纬仪对向观测方法,观测贴于内框靠块的镜面,从真北方位基准上引北,并对镜面不平行性进行了修正;根据定向结果和转台显示方位,计算出了两轴转台内框轴向的方位参数。

表3 转台轴向引北实测结果
4.4 直角棱镜校准实例
直角棱镜校准实例如表4所示,这是2017年2月26日在北京,采用2台0.5″Leica TM5100A在高低点进行检测,对直角棱镜棱线水平校准后的互差检测结果。
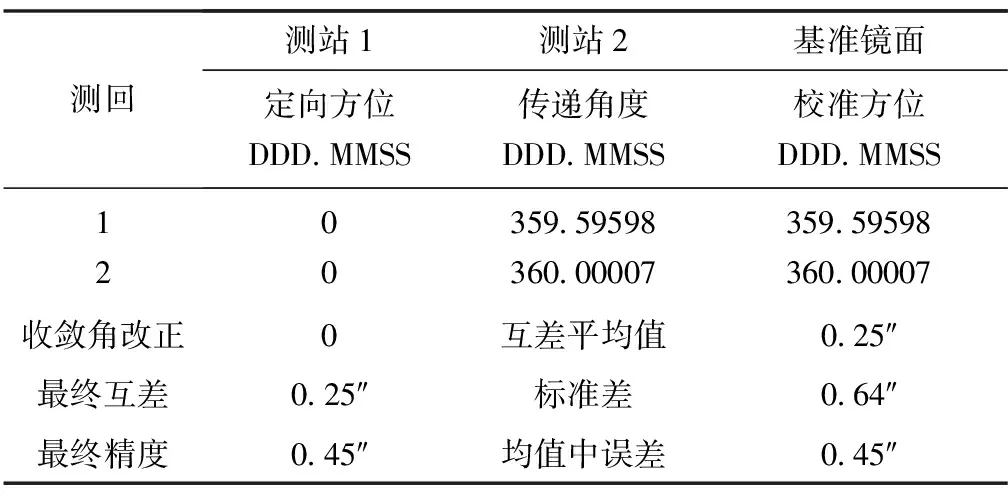
表4 直角棱镜校准结果
5 结论和建议
大量的实测结果表明:
1) 利用天文定向、GNSS定向、经纬仪对向观测方法都是真北方位基准标定和设备引北的特别有效方法;
2) 采用双测站观测北极星,观测3~6测回,通过2站方位传递,在良好的观测环境下,一般很容易获得高于经纬仪标称精度级的定向结果;
3) 在天气许可的条件下,天文定向是真北方位基准标定最佳的首选方法;
4) 在不能采用天文定向时,顾及垂线偏差的影响和有限空间的限制,对于不超过5″的精度要求,采用基于多基线同步网的GNSS定向并施加垂线偏差改正的方法,也是天文定向的可替代方法。
目前,我国真北方位基准标定和惯导设备引北尚无专用标准可循,有关真北方位基准和设备引北检测周期也没有具体规定。因此,这里建议新建真北方位基准,一般经过1年左右检测1次;稳定的真北方位基准,每5年检测1次;转台轴向、产品托架和标定平台等设备引北,每2年检测1次;发生地震和地基沉降等形变影响时要及时检测。
猜你喜欢
导航定位学报(2022年4期)2022-08-16
宇航计测技术(2022年2期)2022-06-01
幼儿园(2021年12期)2021-11-06
导航定位学报(2021年5期)2021-10-13
导航定位学报(2019年2期)2019-06-06
舰船电子对抗(2019年6期)2019-04-27
小学生时代·大嘴英语(2015年7期)2015-11-23
光学仪器(2015年4期)2015-09-24
为了孩子(孕0~3岁)(2009年6期)2009-07-15