
基于事件触发的执行器饱和NCS容错控制
2018-12-10 12:12尚秋冬赵立英白敬郭树理
计算技术与自动化 2018年3期
尚秋冬 赵立英 白敬 郭树理
摘 要:针对具有网络时延和执行器部分故障的网络化控制系统,考虑系统模型可能具有的参数不确定性以及未知扰动,研究执行器饱和时的稳定性问题。对网络时延提出离散事件触发机制,执行器部分故障采用故障矩阵方式,饱和项采取线性凸包法,由此推证出了闭环系统模型。构造Lyapunov 泛函,得出闭环系统在吸引域內达到稳定的充分必要条件,由此得到相应控制器的设计方法。利用仿真证明上述对系统的处理确实可以使系统达到渐近稳定,而事件触发机制也确实可以减少数据量的传输。
关键词:网络化控制系统;执行器饱和;离散事件触发机制;容错控制
分类号:TP302.8 文献标识码:A
Abstract:A network control system with network delay and actuator failure is studied. Considering the uncertainties and unknown perturbations of the system model, the stability of the actuator is studied when the actuator is saturated. A discrete event triggering mechanism is proposed for the network delay. A faulty matrix method is used to solve the fault of the actuator. The closed - loop system model is taken by linear convex method. The Lyapunov functional is constructed and the sufficient and necessary conditions for the stability of the closed-loop system in the attracting domain are obtained. The design method of the corresponding controller is obtained. The simulation results show that the above-mentioned system can achieve the asymptotic stability of the system Mechanism can also reduce the amount of data transmission.
Key words:networked control system;actuator saturation;discrete event-triggered scheme;fault-tolerant control
1 引 言
实际控制系统中控制器大部分通过执行器驱动被控对象,但是在控制系统的稳定性问题上,人们过多的把目光集中在如何设计一个性能更好的控制器上。文献[1]在执行器故障的基础上设计了具有鲁棒完整性的控制器,文献[2]在系统存在未知扰动的前提下,设计了具有鲁棒H∞性的控制器。这些文献都没有处理执行器饱和现象,忽略了执行器饱和带来的稳定性问题,导致控制器性能也无法保证。意识到这个问题,学者们开始研究执行器饱和现象。
近年来,由于网络化控制系统较传统控制系统具有信息资源能够共享、模块化、分散控制、易于工程开发和维护以及低成本等优点,网络控制系统执行器饱和问题备受关注。文献[3]研究一类执行器饱和时滞系统的状态反馈控制问题,文献[4]考虑一类执行器饱合Hamilton网络控制系统,考虑扰动及饱和因素,基于此设计系统的鲁棒H∞控制器。网络的存在使得系统产生时延与丢包现象,它们对系统的稳定性产生影响,这些文献未考虑时延与丢包。基于此,在执行器饱和现象的基础上考虑离散事件触发机制,通过减少数据量传输缓解数据包丢失与时延现象,并且可以有效节省网络资源。
大部分文献或者忽略执行器饱和现象,或者忽略执行器可能发生的故障、时延丢包、系统参数不确定性以及外部扰动等问题。因此,保证系统在多个约束前提下仍能保持其渐近稳定性成为本文的重点。
在执行器饱和的网络化控制系统的基础上,考虑执行器部分失效,设计有关系统的容错控制器。对于网络带宽有限及数据包传输量过大引起的数据包丢失和网络时延等现象,考虑离散事件触发机制,以减少数据量的传输,缓解时延及丢包现象。基于此,建立闭环系统模型,利用Lyapunov稳定性理论,在椭球域内,求解系统的容错控制器,证明系统的鲁棒完整性。
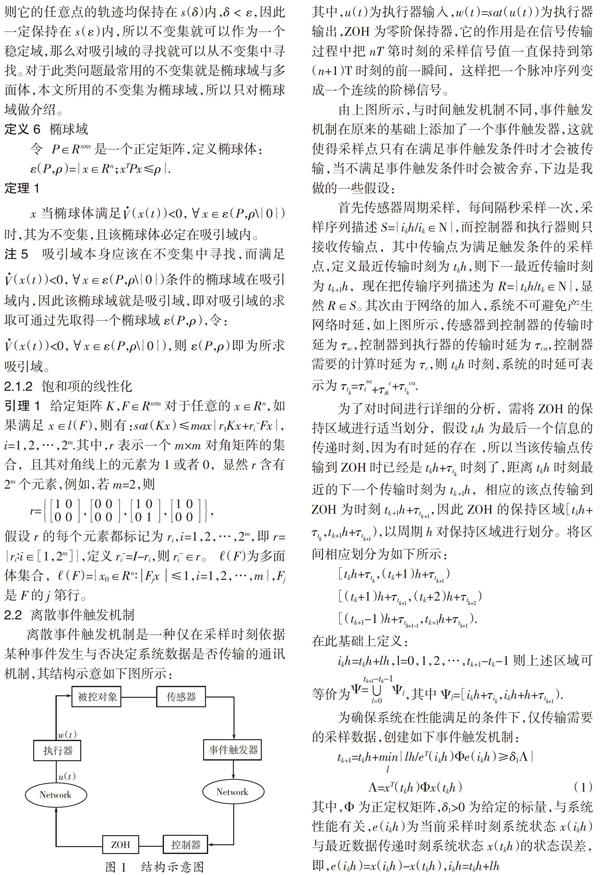
2 问题描述
2.1 执行器饱和
如图3所示为该系统的信号图,在30 s的时间内总共传输了64个数据包,传输率为21.3%,大大减少了数据量的传输,较时间触发通讯机制而言,自然可以节约网络通讯资源,这在一定程度上也有效的缓解数据传输通道的拥挤状况,减少数据包丢失及网络传输时延。
5 结 论
针对具有网络时延和执行器部分故障的网络化控制系统,研究当系统存在执行器饱和约束时的系统稳定性状况,为了节约网络资源,减少时延和数据包丢失,考虑离散事件触发机制,为了研究系统的鲁棒完整性,考虑故障矩阵,并利用线性凸包法处理饱和项,得到闭环系统模型,基于Lyapunov稳定性理论,构造Lyapunov泛函,利用相互凸原理等技术得到相应矩阵不等式,运用Matlab中的求解器得到具有鲁棒完整性的控制器,最后通过仿真证明了结果的有效性。
参考文献
[1] 李炜,赵莉,蒋栋年,等.基于事件触发的NCS鲁棒完整性设计[J].兰州理工大学学报,2014,40(1)∶74—79.
[2] 贾新春,郝晓蕾,张大伟.事件触发通讯制下线性系统的网络化动态输出反馈控制[J].山西大学学报,2016,39(2)∶170—180.
[3] 姚和军,袁野,乔
[4] 洪晓芳,王玉振,魏爱荣.一类执行器饱和非线性Hamilton网络控制H∞系统控制器设计[J].山东大学学报,2014,44(1)∶49—56.
[5] 曹德胜,贾海龙.随机长时延网络控制系统稳定与镇定仿真分析[J].计算机仿真,2014,31(3)∶328—331.
[6] CHEN D,LI S,SHI Y. The practical stabilization for a class of networked systems with actuator saturation and input additive isturbances[J]. Mathematical Problems in Engineering,2012, 2012(2)∶1—19.
[7] ZHANG J,CHEN P. Synchronization of master-slave neural networks with a decentralized event-triggered commun-ication scheme[J]. Neurocom-putting,2016,173(P3)∶1824—1831.
[8] 李金娜,张庆灵,韩世迁.具有饱和非线性约束的网络控制系统鲁棒H∞ 优化控制[J].东北大学学报:自然科学版,2008,29(5)∶617—620.
[9] HU S,YIN X,ZHANG Y,et al. Event-triggered guaranteed cost control for uncertain discrete-time networked control systems with time-varying transmission delays[J]. Let Control Theory& Applications,2012,6(18)∶2793—2804.
[10] 俞立.鲁棒控制——线性矩阵不等式[M].北京:清华大学出版社,2002.
[11] GAO H,CHEN T. Estimation for uncertain systems with limited commun-ication capacity [J]. IEEE Transactions on Automatic Control,2007,52(11)∶2070—2084.
[12] JIANG X,HAN Q L,LIU S,et al. A newstabilization criterion for networked control systems[J]. IEEE Transactions on Automatic Control,2008,53(4):1025—1032.
[13] ZHANG W A,LI Y. A robust control approach to stabilization of networked control systems with time-varying delays[J]. Automatica,2009,45(10): 2440—2445.
[14] PARK P,KO J W,JEONG Chang-ki. Reciprocally convex approach to stability of systems with time-varying delay[J].Automatic,2012,47(1):235—238.
[15] CHEN P,ZHANG J. Event-triggered output-feedbackcontrol for Networked control systems with time-varying sampling[J]. IEL Control Theory Appl,2015,9(9):1384—1391.
[16] JIA X C,CHI X B,HAN Q L,et al. Event-triggered fuzzycontrol for a classnonlinear networked control systems using the deviation bounds of asynchronous normalized membership functions[J]. Inf. Sci. 2014,259:100—117.
[17] MENG X Y,CHEN T W. Event based agreement protocols for multi-agent Networks[J].Automatical,2013,49(7):2521—2132.
