基于全周期电流包络线开关磁阻电机无位置传感器技术
2019-01-22 04:39张磊刘闯韩守义
电机与控制学报 2019年11期
张磊 刘闯 韩守义

摘 要:針对开关磁阻电机在低速运行状况下位置估计困难的问题,依据转子位置信号与电感曲线之间关系,提出一种全周期脉冲电流峰值包络线的无位置传感器技术。导通区域利用固定转波时间的斩波控制方式,非导通区域进行注入高频脉冲,两个区域里分别检测出脉冲电流的峰值,通过数学拟合得到全周期脉冲电流包络线与电机转子位置角之间的数学模型,再通过简易的逻辑比较模块即可得到电机转子位置信号,再根据转子位置信号之间的夹角估算出电机转速和转子位置角度。所提方法由于三相电流包络线交接点在电感上升和下降过程中,电感变化率大,所以不同脉冲下的电流峰值变化大,从而提高了微处理器处理精度,且不需要预先设置脉冲电流阀值,算法简单,容易实现。最后通过仿真和实验,验证了所提方法的正确性和可行性。
关键词: 开关磁阻电机;全周期包络线;位置估计;斩波控制;脉冲注入
DOI:10.15938/j.emc.2019.11.014
中图分类号:TM 351
文献标志码:A
文章编号:1007-449X(2019)11-0109-09
收稿日期: 2017-08-20
基金项目:国家自然科学基金(51377076);江苏省自然科学基金(BK20151574)
作者简介:张 磊(1974—),男,博士,副教授,研究方向为开关磁阻电机无位置传感器技术;
刘 闯(1973—),男,博士,教授,博士生导师,研究方向为特种电机及控制、新能源技术;
韩守义(1982—),男,博士研究生,讲师,研究方向为多相开关磁阻电机及控制技术。
通信作者:张 磊
Sensorless of switched reluctance motor drives based on full cycle current envelope
ZHANG Lei1, LIU Chuang2 , HAN Shouyi2
(1.School of Electronic Engineering, Nanjing Xiaozhuang University,Nanjing 211171,China;
2.College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016,China)
Abstract:
In order to solve the difficulty of sensorless low speed operation of switched reluctance motor,according to the relationship between the rotor position signal and the inductance curve and the peak value of the pulse current for the switched reluctance motor, a new sensorless technique was presented using the full cycle pulse current peak envelope. Using the chopper control mode in the conducting region, and using the high frequency pulse injection in the nonconducting region, and the peak value of the pulse current was detected in the two regions, the mathematical model between peak envelope of pulse current and rotor position was obtained by fitting. The position signal was estimated by means of using a simple logic comparison module, and the motor speed and rotor position angle were estimated . Because the envelope intersection point is not in the maximum and minimum inductance regions, the position estimation error is small,and also need not set the pulse current threshold. The algorithm is simple and easy to implement. The experiments and simulation results demonstrate the feasibility and the practicality of the proposed method.
Keywords:switched reluctance motors; full cycle envelope; sensorless; chopper control; pulse injection
0 引 言
开关磁阻电机(switched reluctance motor,SRM)是定转子为齿槽结构,定子齿上饶通电线圈,转子齿上无绕组,也无永磁材料,所以结构简单、坚固、高容错性等特点,非常适合在矿井传动系统、航空、电动汽车、纺织等领域[1-4]。但在开关磁阻电机调速系统中,控制系统需要有准确的转子位置信号,而转子位置信号是要安装位置传感器,这样会增加了系统的复杂性,如果位置传感器发生故障,系统运行会混乱,降低了系统的可靠性,因此SRM无位置传感器技术得到国内外很多学者的广泛研究。
开关磁阻电机位置估计主要脉冲注入、电流梯度、电感模型、简化磁链等方法,脉冲注入法是低速状态下位置估计的常用方法,文献[5]针对三相SRM传动系统,同时对两非导通相注入高频电压脉冲信号,比较脉冲电流峰值大小估计换相位置,该方法不需要增加硬件,但将电机电感理想为分段线性电感,所以换相点估计精度不高,也可能产生负转矩现象。文献[6]采用电流峰值与预设的电流阀值比较估计转子位置,对某一非工作相注入高频脉冲,利用均值采样数学方法计算出脉冲电流峰值,针对母线电压波动影响电流阀值的问题,文献通过增加修正模块,提高了峰值的精度,该方法峰值计算过程较复杂。文献[7]针对分块SRM提出了一种改进型脉冲注入方法,对非导通相注入脉冲电压,与传统的脉冲注入不同的是通入电压时间是逐渐增大,这样会减少脉冲电流峰值微小而影响到位置估计精度,但脉宽变大会使电机产生反向转矩,降低起动效率。文献[8]在PWM控制方式下,比较相邻PWM信号下的电流大小,计算其电流峰值和时间,根据微处理器记录的实时计数值与开通角、关断角时刻的脉冲数比较,估计下一相的开通角和关断角。文献[9]对非导通相注入高频脉冲,计算出脉冲电流上升的斜率和脉冲电流下降的斜率,由于脉冲电流上升的斜率与下降斜率差的包络线与相电感曲线相同,所以文献通过比较三相斜率差的包络线实现转子位置的估计,该方法避开了反电动势的影响,提高了位置估计的精度。文献[10]对非导通相注入高频脉冲,导通相采用PWM控制,分别采集电流上升和下降脉冲电流斜率,由脉冲电流斜率差间接估算电机电感,再通过电感分区和预设电感阀值来估计起动相,该方法脉冲电流峰值的提取比计算电感信息容易。文献[11]根据电感与转子位置信号之间的逻辑关系,将电感分区,通过比较三相电感大小估计转子位置信号。文献[12]将电机的电感模式和电压平衡方程相结合,通过数学手段推到出位置估计数学模型,该方法虽然没有增加硬件系统,但没有考虑互感对电感的影响。文献[13]基于非线性电感模型,分别针对单相励磁和双相励磁两种状态下进行位置估计,由于双相励磁产生互感,文献采用了磁链差值计算,减小相间互感对位置估计的影响,提高了位置估计精度。文献[14]将电机电感模型转为复平面,利用电感向量合成规律,分析矢量角与转子位置角度之间的关系实现了位置估计,该方法优点是不需要增加硬件也不需要测量电机磁链。文献[12]将电感曲线进行分区,最大和最小电感独立作为一个区域,根据分区规律预设高低两个电流阀值,通过脉冲电流峰值与阀值比较获取换相信号,该方法避免了因电感最大和最小区域电感变化微小而影响到位置估计精度的问题,但双电流阀值的选择较复杂。
本文提出一种基于全周期脉冲电流包络线的无位置传感器方法。在导通区域利用斩波控制方式,非导通区域进行注入高频脉冲,在两个区域里分别检测出脉冲电流的峰值,通过数学方法处理,整合为全电感周期的脉冲电流包络线,再通过逻辑比较即可估计出电机转子位置信号,该算法简单、实用,并通过实验进行了验证。
1 脉冲注入原理
开关磁阻电机不对称半桥功率变换器,非常方便脉冲注入方法的实现,当给电机的相繞组注入高频电压信号时,由于注入的电压很小,所以可以忽略电机饱和相间互感,电机的电压平衡方程式为
uk=Rkik+Lk(θ)dikdt+ikωdLk(θ)dθ。(1)
式中:uk为第k相绕组的端电压;Rk为第k相绕组的电阻;ik为第k相绕组的相电流;Lk为第k相相电感;ω为电机的转速;θ为电机的转子位置角;k=1,2,…,m,m为电机相数。
在电机低速情况下,相电流和电机转速都很小,式(1)中相绕组电压和旋转电动势Rkik、ikωdLk(θ)dθ可以忽略,则式(1)可简化为
uk≈Lk(θ)dikdt。(2)
即
Lk(θ)≈UkΔTipeak。(3)
式中:ipeak为脉冲响应电流,从式(3)可以看出,当端电压Uk和注入的高频脉冲开通时间ΔT固定时,电机的相电感Lk(θ)和脉冲电流峰值ipeak成反比(图1所示),电机的相电感Lk(θ)包含了转子位置角θ信息,因此可以通过检测脉冲响应电流,解算出转子的位置信息。
2 全周期包络线位置估计策略
传统的脉冲注入方法是对非导通相注入高频脉冲信号,需要预设电流阀值,仅适合于单拍运行控制,本文在其基础上对电流峰值包络线的提取进行了改进,结合脉冲注入和斩波控制,提出了全周期脉冲包络线的无位置传感器技术。
2.1 全周期脉冲电流包络线提取
一个电感周期分2个过程,第一个过程为电感下降区域,其过程为非导通区域,在此区域注入高频脉冲信号,第二个过程为电感上升区域,其过程为导通区域,其区域采用固定斩波时间Δt的斩波控制方式,如图2所示。
1)脉冲注入过程:PWM1为注入的高频脉冲,Δton为开通时间,脉冲电流从零开始上升,i1为脉冲电流峰值,即脉冲电流的变化量为i1,所以式(3)变为
Lk(θ)≈UkΔtoni1。(4)
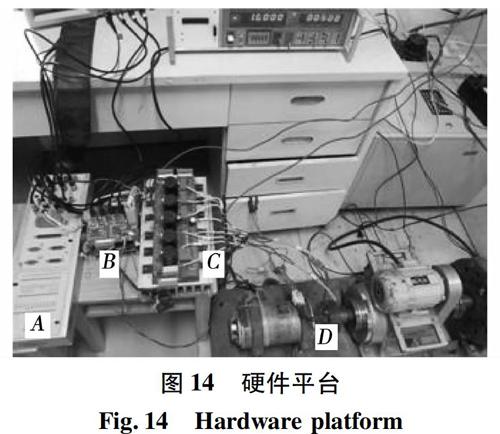
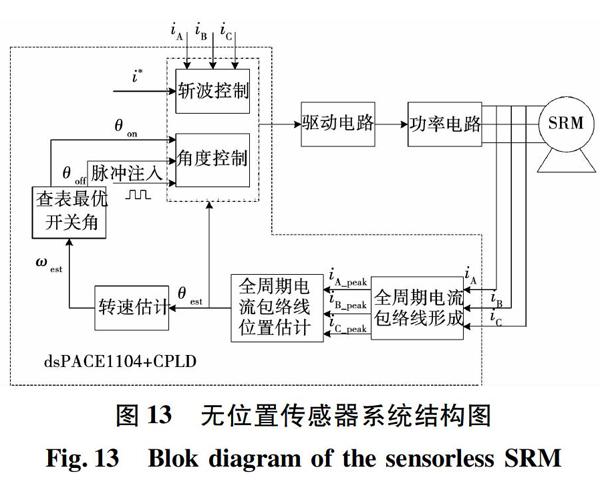
2)斩波控制过程:在固定斩波时间Δt的斩波控制方式下,设置一个斩波限i,当斩波限电流i大于相电流i,斩波PWM2信号为1,开通开关管,相电流继续上升,当i Lk(θ)≈UkΔtoffi-i2。(5) 对比式(4)和式(5),如果PWM1中的Δton与PWM2中的Δtoff相等,则两个过程中的电流变化量相等,在PWM1下降沿时刻采集脉冲电流峰值,再经过拟合处理,得到脉冲电流包络线i1,在PWM1上升沿时刻采集斩波控制期间的脉冲电流,同样经过拟合处理,得到脉冲电流包络线i2。 根据脉冲注入法原理,在相等的时间里,脉冲电流的峰值与电感成发比,所以只要保证Δton和Δtoff相等,i1和i2电流的峰值反应电感的变化情况,与电感成反比。按照数学几何知识,包络线i2关于1/2i对称可得到包络线i3,再将i1与i3包络线通过“异或”逻辑组合,即可得到与全周期电感曲线成反比的全周期电流峰值包路线ipeak曲线。 2.2 全周期脉冲电流包络线形成 全周期电流峰值包路线由脉冲电流峰值包路线和斩波电流峰值包路线两部分组成,根据全周期脉冲电流包络线提取过程,在脉冲注入和斩波控制两个状态切换过程中,会出现脉冲电流采集点较少,得到的包络线精度不高。 1)当导通相开关管关断时,相电流通过二极管开始续流,在此期间,如果注入脉冲,会产生负转矩,并且延长相电流续流时间 所以要在相电流变为零时,开始注入脉冲,这样就会形成续流I区域没有采集到相电流峰值,圖3所示。 2)当导通相开关管开通时,相电流开始上升,上升的时间大小受电流斩波限i影响,并且此上升时间比固定斩波时间Δt大,所以,也会形成II区域没有采集到相电流峰值,图3所示。 对于以上两种情况,I和II区域大小随着开关角变化而变化,如果I和II区域大,得到的包络线就不能很好的体现电感变化规律,最终会影响到位置估计精度。针对这种现象,为了提高该方法的通用性,采用拟合的方法,将I和II区域包络线补全,这样,就不受开通角和关断角的影响,适合于变角度控制方式。 为了定量分析全周期脉冲电流包络线的可行性,本文对[0,45°]一个电感周期脉冲电流峰值包路线和斩波电流峰值包路线进行实测,图4为0~45°之间的全周期包络线与转子位置角关系曲线。 为了建立全周期包络线与位置角之间的关系模型,采用曲线拟合的方法,考虑便于微处理器计算和算法的简单,本文选择多相式拟合方法求得θ-ipeak的数学模型为 θ=∑nm=0amimpeak。(6) 将图4实测的数据,利用Matlab对式(6)进行多项式拟合,图5为3阶到7阶式(6)多项式函数拟合的误差曲线,由图5可以看出,当阶数是5时,拟合误差平均最小,所以本文选择阶数n=5来拟合全周期电流包络线与位置角之间的数学模型。 三相电感曲线呈周期性对称,且两两相隔15°,由此可以得到12/8三相开关磁阻电机三相全周期包络线与位置角之间的数学模型为 θA=∑5m=0amiA_peak, θB=∑5m=0amiB_peak+15°, θC=∑5m=0amiC_peak+30°。(7) 2.3 全周期包络线位置估计 图6为12/8结构开关磁阻电机全周期三相脉冲电流峰值包络线与转子位置关系图,其中,iA-peak、iB-peak、iC-peak分别为A、B、C三相脉冲电流包络线,与三相电感成反比,PA、PB、PC为三相转子的位置信号,图中横坐标角度为A相位置角度,0°对应A相脉冲电流峰值的最大值,即A相电感最小处,由图可以看出,三相脉冲电流包络线交点分别对应转子位置信号的边沿,如图中A相和C相脉冲电流包络线的两个交点P1、P2分别对应B相转子位置信号PB的下降沿和上升沿时刻,所以只要比较A相和C相脉冲电流峰值即可估计出B相转子位置信号的边沿时刻,从而可以得到B相半周期导通的位置信号,同理,也可以比较其他两相的脉冲电流包络线得到A、C两相的转子位置信号的边沿时刻以及半周期导通的位置信号。 根据图6位置信号估计的原理,本文设计了一个简易的逻辑比较电路来实现,如图7所示,iA_peak、iB_peak、iC_peak三相脉冲电流峰值通过三个逻辑门电路比较得到PA、PB、PC三相转子位置信号,例如当iC_peak大于iB_peak时,PA为1,即逻辑电路发出PA上升沿信号,iC_peak小于iB_peak时,PA为0,即逻辑电路发出PA下降沿信号,由于三相电流包络线交接点在电感上升和下降过程中,电感变化率大,所以不同脉冲下的脉冲电流峰值变化大,从而提高了微处理器处理精度。 3 轉速估算 利用上述的全周期电流包络线交截比较方法得到包络线交点的位置检索脉冲信号,如图8所示。A相和B相的脉冲电流包络线的交点为P1、P2、P3,其中P1和P3对应C相电感最大位置,P2对应C相电感最小位置,相邻的两个交点的位置检索脉冲信号隔角为Δθ =22.5°,因此记录两个相邻的检索脉冲信号上升沿时间间隔为Δt,即可通过式(8)、式(9)估算出电机转速和C相位置信号。 n=ΔθΔt(deg/s)=60×Δθ360×Δt(r/min),(8) θ(k+1)=θ(k)+ωΔt。(9) 其中:θ(k)为上次采样时间估算的位置角;θ(k+1)为本次采样时间估算的位置角;Δt为采样时间。 4 仿真分析 为验证理论的正确性,在Matlab/SIMULINK环境下搭建了三相12/8结构SRM全周期电流包络线无位置传感器仿真模型,主电路采用不对称半桥,固定关断时间Δt斩双管方式,仿真参数:电机的额定功率为1.5 kW、额定转速为1 500 r/min,Δt为1×10-5 s,注入的脉冲周期为0.000 1 s,占空比为10%。 4.1 全周期包络线提取仿真 图9为一相固定关断时间斩波仿真模型,电流上限为10 A,固定关断时间为1×10-5 s,下降沿触发模块完成时间相加,即当触发模块受到下降沿时输出一个时间信号,该时间等于触发时刻的时间加上一个延时时间,也就是固定关断时间Δt,将系统运行时间与触发模块输出的时间比较,当触发模块输出的时间小于系统运行时间,比较器输出信号将变为1,反之,比较器输出信号为0,形成斩波控制PWM2,其他两相的分析方法也一样。 图10为全周期电流峰值包络线的提取过程仿真图,从仿真波形可以看出,相电流仿真波形与图2和图3理论分析一致,非导通区域注入高频脉冲,得到脉冲电流峰值电流波形,导通区域采用固定关断时间斩波控制方式,导通区域相电流进行对称数学处理后得到如图10所示的斩波电流峰值电流波cc形,将脉冲电流峰值电流与斩波电流峰值电流进行异或逻辑处理即可得到全周期电流峰值包络线。 4.2 位置估计仿真 图11为电机运行在仿真条件为θon=0°,θoff=20°,斩波限i为2 A,转速为400 r/min下的仿真结果,通过全周期电流峰值包络线提取过程,得到三相全周期电流峰值包络线,三相包络线通过逻辑比较模块,由B和C相包络线比较估计A相转子位置信号,从仿真结果图可以看出,A相估计的转子位置信号的边沿时刻正好对应B和C相包络线的交点,而且位置估计误差也很小。 图12为开通角θon=-2°,θoff=18°,斩波限i为2 A,转速为600 r/min的位置估计仿真波形,从仿真图看出,在变角度控制(APC)下,通过全周期电流峰值包络线位置估计策略,仍能得到较高精度的A相估计位置信号。以上仿真结果验证了所提的位置估计方法能在不同开关角下,都能得到全周电流包络线,并能完成位置估计。 5 实验验证 为了验证上述提出的位置估计策略的可行性,本文在一台12/8结构SRM样机上进行了实验,图13为系统结构图,功率电路采用三相不对称半桥结构。SRM样机额定功率1.5 kW、额定额定转速1 500 r/min。 硬件平台如图14所示,其中A为dSPACE主控系统、B信号调理电路、C为功率电路、D为SRM。控制器采用dSPACE1104+CPLD。 图15为电机转速420 r/min情况下的全周期电流包络线提取实验波形,其中,图15(a)为非导通过程中脉冲电流峰值包络线提取波形,通道1为脉冲电流波形,通道2是在PWM1下降沿采集的脉冲电流峰值,再通过拟合得到脉冲电流包络线,图15(b)是在开通角为0°和关断角为20°下得到的全周期电流包络线波形,通道1是脉冲注入和斩波控制两个过程的相电流波形,通道2对应的全周期电流包络线波形,此实验结果与理论分析和仿真结果一致。 图16(a)为开通角为-2°和关断角为-18°下电机三相全周期脉冲电流包络线的实验波形,在PWM1的下降沿和PWM2的上升沿时刻采集电流值,通过拟合得到三相全周期包络线,分别为iA_peak、iB_peak、iC_peak,然后将iA_peak、iB_peak、iC_peak通过比较逻辑运算电路估算出电机转子的位置信号,图16(b)为三相相电流波形和全周期包络线比较得到的B相位置估计信号实验波形,得到的三相脉冲电流峰值由式(7)估计出各相转子位置角。由为了验证该位置估计算法精度,实验中将位置传感器的位置信号与本文所提位置估计算法得到的位置信号进行比较,得到如图17所示的位置估计误差,从误差比较可以看出,位置误差都不超过0.3°之内,进一步验证了该算法的正确性。 为了验证本算法的优越性,与文献[12]双电流阀值的位置估计方法进行了实验对比,图18分别为转速为100 r/min、350 r/min下双电流阀值位置估计实验波形图,可以看出,转速为100 r/min时,位置估计误差Δθ达到0.67°,当转速上升到350 r/min时,位置估计误差Δθ达到1.6°,对比图17本文所提算法的位置估计误差,可以看出本文位置估计算法具有更高的位置估计精度。 6 结 论 针对脉冲电流注入方法需要预设电流阀值问题,本文在脉冲注入的理论基础上,提出了一种全周期电流包络线无位置传感器技术,通过脉冲注入和斩波控制方式,分别提取电流包络线,通过拟合等数学手段,得到与转子位置关联的全周期电流包络线,该方法简单、没有增加硬件,可以實现多拍工作方式,通过仿真和实验验证了该方法的可行性和正确性。 参 考 文 献: [1] FAHIMI B, EMADI A,S EPE R B J.A switched reluctance machinebased starter/alternator for more electric car[J].IEEE Transactions on Energy Conversion, 2004,19(1):116-124. [2] SADEGHI S, SADEGHI R. SADEGHI M.Dynamic performance of a switched reluctance motor for propulsion systems[C]//International Symposium on Power CElectronics, Electrical Drivers, Automation and Motion. Taormina , Italy:Nagasaki University,2006:1419-1424. [3] Ravichandran M H,Sadasivan Achari V T,Joseph C C,et al. Asimplified design methodology for switched reluctance motor using analytical and finite element method[C]//International Conference on Power Electronics ,Drives and Energy Systems.New Delhi,India:IEEE,2006:1-4. [4] SCHUZ S E,RAHMAN K M. Highperformance digital PI current regulator for EV switched reluctance motor drives[J].IEEE Transactions on Industry Applications,2003,39(4):1118-1126. [5] 李景男, 王旭东, 周永琴. 基于两相脉冲激励的开关磁阻电动机无位置传感器转子位置检测[J]. 电机与控制学报, 2002, 6(1): 6-9. LI Jingnan, WANG Xudong, ZHOU Yongqin. Sensorless rotor position detection of SRM based on voltage pulses to two phase[J] .Electric Machines and Control, 2002, 6(1): 6-9. [6] 罗德荣,李亚雄,李孟秋.等.基于单阈值的开关磁阻电机无位置传感器技术[J] 湖南大学学报(自然科学版).2017.44(2):94-100 LUO Derong, LI Yaxiong, LI Mengqiu, et al. Sensorless technology in switched reluctance motor based on the single threshold[J]. Journal of Hunan University (Natural Sciences),2017,44(2):94-100. [7] 邵杰, 邓智泉, 胡荣光. 基于改进脉冲注入开关磁阻电机无位置传感器技术[J].电工技术学报,2015,30(21):147-153 SHAO Jie, DENG Zhiquan ,HU Rongguang .An improved sensorless driving method of switched reluctance motors using impressed voltage pulse[J]. Transactions of China Electrotechnical Society, 2015,30(21):147-153. [8] 李珍国,王红斌,王江浩,等.基于电流波形检测法的开关磁阻电动机无位置传感器控制[J] 电工技术学报,2016,31(11):97-104 LI Zhenguo, WANG Hongbin, WANG Jianghao, et al. Sensorless control of switched reluctance motor based on current waveform detection method [J].Transactions of China Electrotechnical Society, 2016,31(11):97-104. [9] 毛宇阳, 邓智泉, 蔡骏,等.基于电流斜率差值法的开关磁阻电机无位置传感器技术[J] 电工技术学报, 2011,21(9):87-93. MAO Yuyang, DENG Zhiquan, CAI Jun, et al. Sensorless control of switched reluctance motor based on current slope difference method[J] Transactions of China Electrotechnical Society , 2011,21(9): 87-93. [10] 蔡駿,邓智泉. 基于全周期电感法的开关磁阻电机无位置传感器技术[J].电工技术学报, 2013,28(2):145-153. CAIJun, DENG Zhiquan. Sensorless control of switched reluctance motor based on fullcycle inductance method[J]. Transation of China Electrotechnical Society, 2013, 28(2): 145-153 . [11] 周竟成, 王晓琳, 邓智泉, 等, 邹东坡.开关磁阻电机的电感分区式无位置传感器技术[J].电工技术学报, 2012,27(7):35-40. ZHOU Jingcheng, WANG Xiaolin, DENG Zhiquan, et al.The position sensorless technology of switched reluctance motor based on the regional comparison of threephase inductance[J]. Transaction of China Electrotechnical Society, 2012,27(7):35-40. [12] 陈坤华, 孙玉坤, 李天博 开关磁阻电机无位置传感控制器研究[J].电机与控制学报,2016,20 (3):85-89. CHEN Kunhua,SUN Yukun,LI Tianbo. Sensorless control of switched reluctance motor[J]. Electric Machines and Control, 2016,20(3):85-89. [13] 蒯松岩,李奎,衡凤平,等. 考虑互感影响的开关磁阻电机无位置传感器控制技术[J].电工技术学报,2017,32 (8):178-186. KUAISongyan, LI Kui , HENG Fengping , et al.Position sensorless technology of switched reluctance motor considering mutual inductances[J]. Transaction of China Electrotechnical Society, 2017,32 32(8):178-186. [14] 蒯松巖,李兴红,马金洋,等. 复平面电感模型开关磁阻电机中低速无位置传感器技术[J].电机与控制学报,2015,19 (8):1-8. KUAI Songyan, LI Xinghong, MA Jinang,et al.Sensorless control of switched reluctance motor at lowmedium speed based on complex plane modern of phase inductance[J]. Electric Machines and Control, 2015,19 (8):1-8. [15] 张磊, 刘闯, 王云林,等.开关磁阻电机变双电流阀值的无位置传感器技术[J].中国电机工程学报,2014,27 (34):4683-4690. ZHANG Lei, LIU Chuang, WANG Yunlin, et al. The position sensorless technology of switched reluctance machines based on double variable current thresholds[J]. Proceedings of the CSEE,2014.27(34)4683-4690. (编辑:刘素菊)