
洋山深水港四期悬臂箱区的基本定义和管控规则
2019-03-13 02:06
港口装卸 2019年1期
上海国际港务(集团)股份有限公司尚东集装箱码头分公司
1 引言
根据水-水中转比例和堆场容量需求,洋山深水港四期码头自动化堆场间隔布置了10对悬臂箱区,其中西侧最端部的一块悬臂箱区,采用双悬臂轨道吊作业。悬臂箱区稳定、可靠、高效的运行,对洋山深水港四期自动化码头堆场作业非常重要。为了提高中转比例高的大型自动化集装箱码头的适应性,在分析了现有自动化码头典型堆场布置基础上,何继红[1]等提出了无悬臂、单悬臂和双悬臂3种型式轨道吊在自动化堆场混合应用的方案。现有的超声波测距技术在轨道吊防撞功能中的应用,以及其他的一些控制技术,虽然部分解决了轨道吊的防撞问题,但未能有效解决同一箱区2台轨道吊作业的协同性。另外,全球已经在运营的其他主要集装箱自动化码头,还没有使用过类似的悬臂、无悬臂箱区间隔布置的设计,在系统设置、箱区的基本定义和管控规则等方面,没有现成的经验可供参考和借鉴。目前在洋山深水港四期全自动化集装箱码头,成功实践了无悬臂、单悬臂和双悬臂3种型式轨道吊在自动化堆场混合应用的方案,设备和系统稳定。本文结合洋山深水港四期项目实例,分析和总结了悬臂箱区的基本定义和管控规则,为其他集装箱自动化码头提供参考。
2 悬臂箱区的基本情况
根据洋山深水港四期工程全自动化集装箱码头总体设计[2],自动化堆场布置有20块悬臂箱区,其中双悬臂箱区1块,单悬臂箱区19块,单悬臂吊箱区中有6块区域靠近陆侧位置带有冷藏箱位。悬臂箱区的布置两两成对,中间留有供AGV (Automated Guided Vehicle,集装箱自动导引运输车)穿行的21 m通道。
普通单悬臂箱区13块,悬臂侧用于与AGV的直接交互作业,可堆放普通20 ft、40 ft、45 ft集装箱,其中45 ft箱仅有最大和最小2个贝位可以堆放。
6块带有冷藏箱位的单悬臂箱区,除具备普通单悬臂箱区的功能外,在靠近陆侧的部分贝位安装有7列冷藏箱支架,可堆放冷藏集装箱,7列冷藏箱旁边还有3列位置可堆放普通45 ft集装箱。
双悬臂箱区1块,其中AGV通道侧的作业模式与普通单悬臂箱区相同,悬臂的另一侧是集卡交互侧,主要用于危险品的转运作业、港区互拖箱作业。
每一块悬臂箱区的陆侧,都配有2条集卡作业车道,主要用于外集卡的进提箱作业。悬臂箱区与AGV的交互作业,主要在21 m通道进行。
悬臂箱区的作业特点为:AGV可以通过悬臂箱区21 m通道进入堆场与轨道吊交互作业;对同一贝位作业时,轨道吊的大车原则上不作移动,而主要由AGV来完成水平移动;AGV与轨道吊之间的作业交互点不固定,集装箱水平运输任务主要由AGV完成,轨道吊仅负责堆垛和装卸作业,效率较高,对箱区的长度也不敏感;2台轨道吊能同时对AGV作业,为岸桥服务[1]。
3 悬臂箱区贝位及作业交互点的定义
3.1 悬臂箱区贝位及悬臂侧AGV的作业交互点
从海侧开始,20 ft箱贝位用奇数(01、03、05……)表示;相邻的2个20 ft箱贝位可以组合成1个40 ft(或45 ft)箱贝位,用偶数(02、04、06……)表示。悬臂箱区悬臂侧与AGV的作业交互点的定义规则为:箱区号+作业区域标示+AGV停车贝位+AGV工作位,譬如:38CW0182中,38代表箱区号,CW代表作业区域标示,018代表AGV停车贝位,2代表工作位(见图1)。作业区域标示有CW和CE两个代码,CW表示悬臂在箱区的西侧,CE表示悬臂在箱区的东侧。AGV工作位有3个数值表示,1表示20 ft箱放AGV海侧,2表示40 ft/45 ft箱放AGV中间,3表示20 ft箱放AGV陆侧。

图1 洋山深水港四期悬臂箱区贝位及作业交互点定义
3.2 悬臂冷藏箱区贝位及作业交互点
悬臂冷藏箱区冷藏箱贝位的定义从300开始,每个箱区有10个冷藏贝位,其中20 ft贝位2个( 301、305),40 ft贝位8个( 310、314、……338),冷藏箱位布置在靠近悬臂吊电气房侧,每个贝位7列。冷藏箱位旁边的另外3列,用于堆放普通45 ft集装箱,贝位的定义与普通悬臂箱区的规则相同。冷藏箱以及旁边普通45 ft箱贝位,与AGV交互点的定义规则,与普通悬臂箱区相同,沿用“箱区号+作业区域标示+AGV停车贝位+AGV工作位”的模式。譬如:47CE3061中,47代表箱区号,CE代表作业区域标示,306代表AGV停车贝位,1代表AGV工作位(见图2)。
3.3 悬臂箱区陆侧集卡作业交互点
悬臂箱区陆侧与集卡的作业交互点的定义规则为:箱区号+LSC+车道号+集卡工作位。譬如:38LSC12中,38代表箱区号,1代表车道号,2代表集卡工作位。每块悬臂箱区,陆侧有2条车道。靠近21 m通道的为1号车道,另一条为2号车道。集卡工作位有4个数值表示,1表示20 ft箱放集卡后部,2表示40 ft/45 ft箱放集卡上,3表示20 ft箱放集卡前部,5表示20 ft箱放集卡中部(见图3)。

图2 洋山深水港四期悬臂箱区冷藏贝位、及作业交互点的定义
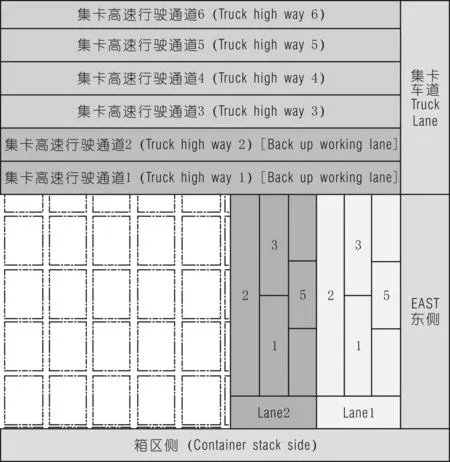
图3 洋山深水港四期悬臂箱区陆侧集卡作业交互点的定义
3.4 双悬臂箱区悬臂集卡侧作业交互点
双悬臂箱区悬臂集卡侧作业交互点的定义规则为:箱区号+作业区域标示+AGV停车贝位+AGV工作位。譬如:61CW0182中,61代表箱区号,CW代表作业区域标示,018代表AGV停车贝位,2代表工作位。作业区域标示有CW和CE两个代码,CW表示悬臂在箱区的西侧,CE表示悬臂在箱区的东侧。AGV工作位有4个数值表示,1表示20 ft箱放集卡海侧,2表示40 ft/45 ft箱放集卡,3表示20 ft箱放集卡陆侧,5表示20 ft箱放集卡中间。
4 同一箱区两台悬臂吊之间的防撞和避让管控
布置在同一悬臂箱区的2台悬臂吊,各自的作业区域几乎都能覆盖整个箱区,经常需要在临近的区域或者重叠的区域交替作业。2台悬臂吊之间完善的防撞和避让管控,对实现悬臂箱区安全、高效的作业,也非常关键。
4.1 防撞
洋山深水港四期悬臂吊的大车定位,是基于安装在大车两侧地面的固定板(FLAG板)和安装在大车上的编码器,通过固定的FLAG板来校准大车的绝对位置,从而达到对两侧大车的精确定位和控制。2台悬臂吊都处于自动运行状态下时,最小安全间距为35 m;一台处于维修状态、另一台处于作业状态时,最小安全间距为26 m。
每台悬臂吊都有向海侧、向陆侧、停止3种运行工况,2台悬臂吊共有9种运行工况组合,每种组合下2台车都可以运行在各自不同的速度。防撞的基本逻辑,主要就是根据2台悬臂吊已知的当前位置和运行工况组合,来决定防撞策略,协同2台悬臂吊安全、高效地开展作业(见表1)。
洋山深水港四期悬臂吊的大车门腿位置,还安装有1套激光测距仪,用于实时测量2台悬臂吊之间的相对距离,用于大车防撞。尤其是在一台悬臂吊通讯丢失,系统无法获知其大车确切位置的情况下,也能有效起到防撞保护作用。

表1 悬臂箱区大车运行工况组合
4.2 避让
同一箱区作业区域重叠的情况下,需要合理地避让管控,才能更好地协同2台悬臂吊的作业,洋山深水港四期悬臂吊的避让控制是由Crane Director(以下简称CD)层面来实现。CD从上层系统获取作业指令和堆场状态信息,从底层获取设备状态信息,CD之间还通过通讯获取另一台设备的指令和状态信息,根据对全局任务的判断,综合考虑避让产生的时间影响、效率和能耗等因素,运用程序逻辑判断给出合理的避让策略。洋山深水港四期悬臂吊避让的基本规则如下:
(1)悬臂吊对于每条作业指令的运行范围都进行3次判断,分别是:接收到指令时、抓箱完成时、另一台悬臂吊接收到指令时。
(2)每一条作业指令都设置优先级,优先级高的悬臂吊具有优先权。
(3)悬臂吊停止抓箱的条件:接收到另一台悬臂吊有一条更高级别指令的信息;2条指令的运行范围有重叠;悬臂吊未到达抓箱位置范围之内。
(4)不受优先级的限制情况:其中一台悬臂吊正在执行指令,而另一台悬臂吊要求其移出交换区域,此时不受优先级限制。后一个接收到指令的悬臂吊,会等前一个悬臂吊完成它的指令后,再进行作业。
(5)放箱指令悬臂吊的优先级,高于抓箱指令的悬臂吊。
(6)优先级相等时,运行范围先申请者优先。
洋山深水港四期悬臂吊避让的主要场景有:2台悬臂吊的指令互不干涉;抓箱前高级别指令占领运行区域;高级别指令占领抓箱已被允许的区域;相同优先级情况下优先完成抓箱的占领区域;指令优先级相同放箱优先级高于抓箱;低优先级的让高优先级的占领整个作业区域;高优先级占领作业区域;抓箱完成后高优先级占领作业区域;同等优先级的轨道吊带载的先占领作业区域;抓箱之前高优先级的轨道吊占领作业区域;低优先级悬臂吊等待;两台轨道吊抓箱位置区域均安全,低优先级的等待放箱;低优先级的悬臂吊已在执行指令,则不受优先级控制。
5 悬臂箱区21 m通道的管控
5.1 悬臂箱区的车道布置
(1)悬臂箱区之间的通道宽度为21 m,在该通道中布置了4根车道,宽度均为4 m,边侧车道的边界线与轨道中心间距为2.5 m。
(2)从左至右4 根车道依次为:作业车道、通行车道、通行车道、作业车道。AGV 通过通行车道,进出 21 m通道。AGV 通过斜行的方式,在通行车道与作业车道间转移。
(3)从左至右4根车道的流向依次为:双向、单向向海侧、单向向陆侧、双向。中间2根通行车道,允许短距离逆行。
5.2 固定停车位
每块悬臂箱区的作业车道上,设计有若干个作业车道固定停车位。AGV在进入作业位作业前,在作业车道固定停车位等待。固定停车位的间距为32.5 m(5个20 ft箱贝位的长度,见图4)。
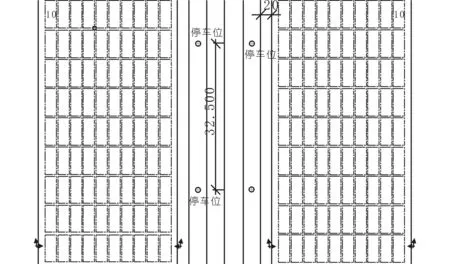
图4 洋山深水港四期悬臂箱区通道固定停车位的布置
固定停车位的分配,以堆场所有的 AGV 作为一个整体,统一计算和优化调整。输入参数包括:
(1)AGV 任务。包括AGVID、JOBID、目标作业位、作业箱号及类型、AGV 上箱子姿态 (箱子在 AGV 上的位置)、车头方向等。
(2)各堆场中目前给出的 AGV 任务间的优先级关系。分配的目标为最高优先级的AGV能最快到达目标作业位。为此,AGV的停车位与目标作业位尽可能近,同时尽量避免干扰高优先级的AGV作业。每当一个完成作业的AGV离开作业位后,会重新调整停车位,并为最高优先级的AGV规划路径以进入作业位。
如图5所示,4辆AGV优先级自高至低依次为AGV1,AGV2,AGV3,AGV4。作业位均在图中T1处,对应56贝位。AGV1 分配到最近的停车位 P1,并行驶至 T1 作业。AGV2分配至停车位P2,不影 响 AGV1 的作业。AGV3与AGV4 分别分配到停车位P3与P0。AGV1作业完成后,重新分配作业位。AGV2停车位P1,并行驶至T1 作业。AGV3分配至停车位P2,不影响AGV1的作业, 亦行驶至P2。AGV4仍分配到停车位P0。新的AGV任务加入序列时,可以临时分配一个不影响现作业的停车位。例如,可以将新的AGV分配P3停车位,重新计划时再做调整。
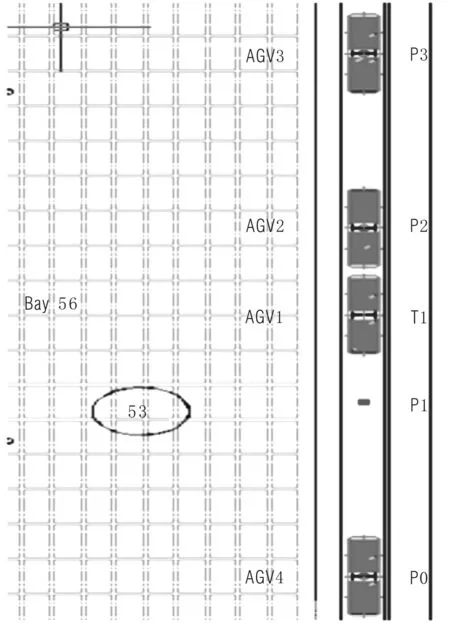
图5 固定停车位的分配
5.3 入口停车位
在21 m通道的入口处,设计有入口停车位。AGV在进入箱区前,路径规划至入口停车位。在TOS(Tape Operating System,生产管理系统)给出该AGV的实际作业次序后,VMS(AGV Management System,集装箱自动导引运输车管理系统)为之分配实际的作业车道停车位,并规划AGV从入口停车位至作业车道停车位的路径。如图6所示。AGV1在通道入口停车位,分配了车道停车位P1。AGV1从入口停车位,通过2次斜行进入作业车道停车位。

图6 洋山深水港四期悬臂箱区通道入口停车位
5.4 出口停车位
在21 m通道的出口处,设计有出口停车位。VMS为AGV规划,自作业位经出口停车位至目标位置的路径,如图7所示。AGV1 在P2完成作业后,规划了经出口停车位的路径。AGV1从作业位,通过2次斜行,经出口停车位,转弯进入高速车道。
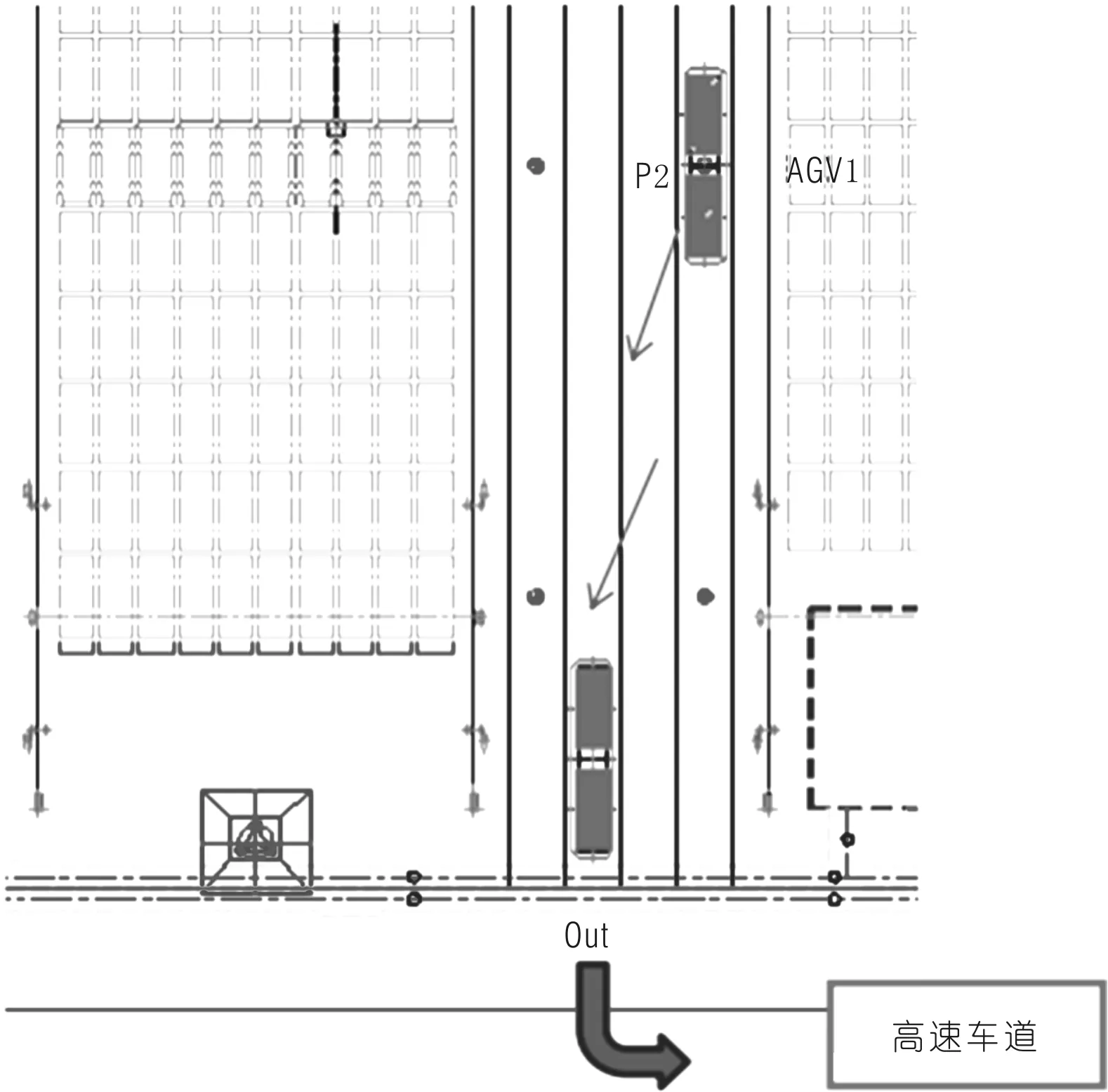
图7 洋山深水港四期悬臂箱区通道出口停车位
5.5 驱离机制
AGV1在悬臂箱区,离开固定停车位去作业位作业时,如果作业位附近的作业车道上有AGV2影响到AGV1的作业,此时,如果AGV1的作业优先级高于AGV2,则将AGV2 驱离该停车位,并重新计划所有 AGV的停车位,或者仅仅是让 AGV2 略作偏离;如果AGV1的作业优先级低于AGV2,则AGV2继续作业,AGV1等待。
6 结语
自动化码头堆场的安全及效率不仅是洋山深水港四期工程追求的目标,也是全球各自动化码头不断探索的课题[3]。目前,洋山深水港四期自动化堆场的悬臂箱区已投入实际生产,设备和系统安全稳定,箱区和通道管控合理,作业质量良好。本文结合洋山深水港四期悬臂箱区应用实例,梳理总结了洋山深水港四期悬臂箱区贝位、作业交互点的一般定义规则,以及悬臂箱区的2台悬臂吊之间防撞和避让、AGV通道管控的基本规则,可为类似的自动化码头堆场悬臂箱区的应用提供参考。
猜你喜欢
智能建筑电气技术(2022年2期)2022-02-06
英语文摘(2020年7期)2020-09-21
上海工运(2019年9期)2019-09-28
数学小灵通(1-2年级)(2019年5期)2019-05-21
运筹与管理(2019年1期)2019-02-15
自然资源情报(2018年7期)2018-12-28
遵义(2018年13期)2018-08-08
新民周刊(2017年49期)2017-12-29
华人经济(2017年7期)2017-08-23
集装箱化(2014年12期)2015-01-06
