基于深度神经网络的空间目标结构识别
2019-04-04 06:00周驰李智徐灿
中国空间科学技术 2019年1期
周驰,李智 ,徐灿
1.航天工程大学 研究生院,北京 101416
2.航天工程大学 航天指挥学院,北京 101416
随着人类航天事业的不断发展,作为“高边疆”的太空日益成为世界各国争夺的焦点[1]。由于空间目标数目与种类的快速增加,快速识别空间目标结构、尺寸、姿态等信息对于科学研究与国家安全具有重大意义。由于地基雷达系统具备可全天候、全天时运行的特点,在空间目标监视系统中发挥着重要作用。其中雷达测量获取的雷达散射截面(Radar Cross Section,RCS)数据与空间目标的物理特征与微运动特征相关,可用于空间目标识别,并且由于其具有数据量小、处理方法简单等特点,一直是目标识别的方向之一[2]。
在利用RCS序列识别目标结构方面,日本学者T Sato利用RCS序列的起伏进行目标结构识别[3]。美国MIT林肯实验室估出空间目标的长轴、短轴,通过两者的比值进行空间目标形状估计[4]。国防科技大学黄小红通过RCS序列的最大值和最小值的比值来表示目标形状[5]。但是以上方法都是建立在将目标等效为椭球体的基础上进行形状估计,如图1所示。此方法仅能估计出目标等效椭球体的轴比,并不能真正识别出目标的形状。文献[6]利用傅里叶-梅林变换提取特征之后进行模糊分类的方法进行识别,但是存在需要预先知道卫星姿态信息的问题。
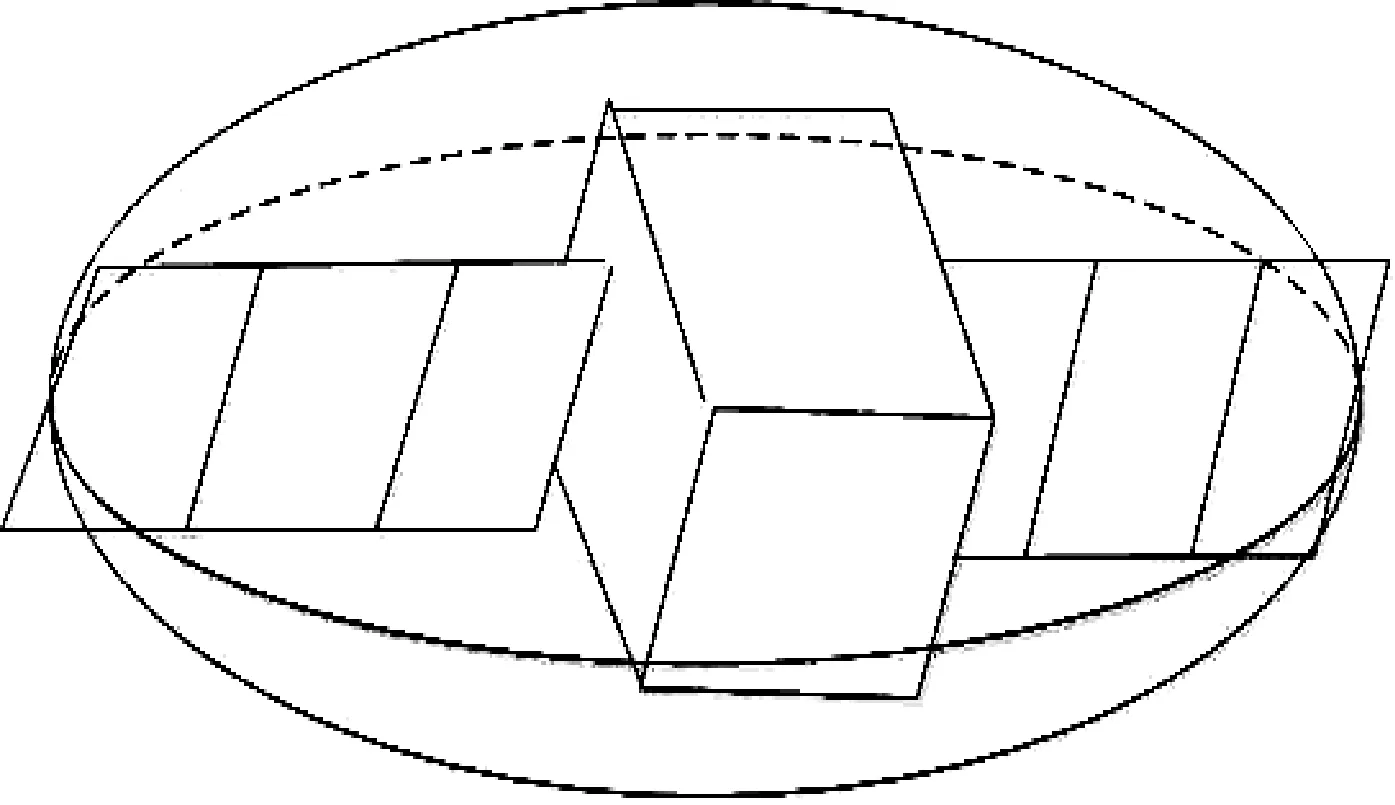
图1 空间目标椭球体模型Fig.1 Space object ellipsoid model
随着计算机技术与性能的不断发展,大数据、机器学习等技术日益成熟,不断应用于人脸识别、语音识别等方面,并取得良好效果。在雷达目标结构识别方面,文献[7]采用遗传算法优化后的神经网络算法(GA-BP)对舰船目标进行识别,文献[8]采用深度神经网络算法(Deep Neural Network,DNN)对空间目标进行识别。以上应用表明,使用机器学习可有效对雷达目标进行识别,但是存在特征向量不具区分度,以及由于特征向量维度过多造成过拟合问题。
相关研究证明空间目标具有分形特征[9],本文将空间目标RCS的分数维作为一项特征值,并结合Fisher判决率对传统特征和分数维特征进行选取,得到特征向量输入DNN算法进行目标结构识别研究。
1 分形理论
分形理论是由数学家Mandelbrot最早提出的一门理论,最初是为了解决海岸线测量问题[10]。不同于一般几何将线视为一维、面视为二维、立体视为三维的观点,分形理论以分形几何学为数学基础,利用分数维度研究问题,对于自然界复杂多样的事物特点进行更加准确的表达,以自相似原则以及迭代生成原则为基础,又称为自相似性分形。
1.1 分数布朗运动
d

式中:λ为比例系数,λ >0;H为Hurst指数,0<H<1;d表示统计分布相同,那么这种信号就是自相似信号。
分形理论表达的是客观物体自身的相似性以及不同客观物体之间的相似性,连续并且不能求导的分数布朗运动模型(fractal Brownian motion,fBm)是分形理论中模型的一种。分数布朗运动模型BH(t)的表达式如下所示:
式中:BH(0)=0;dB(s)为位移,由高斯分布约束;s为时间延迟;Γ(H+1/2)是一个常数;K(t)为积分核,表达式如下式所示:
分数布朗运动具有自相似性,是一种典型的非平稳过程,其增量符合平稳高斯随机过程,分布符合N(0,δ2),其中δ为非零值,有:

Hurst指数表示数据之间的相似性关系,其与分数布朗运动的分数维Fd存在如下关系[11]:

由式(6)可知,只需获得相关数据的Hurst指数或者分数维Fd中的一个参数,便可以得到数据的分形特征。
1.2 分形盒维数
由1.1节可知,对于一组数据,其Hurst指数或者分数维Fd是分形理论的重要参数,求出其中一个值即得到数据的分形特征。目前,估计Hurst指数或者分数维Fd的方法有多种,分别利用了分形的不同性质。估计Hurst指数的常用方法有波动分析法、趋势波动分析法(DFA)和小波波动分析法。分数维Fd的估计方法主要由数盒子法(BOX)、基于 fBm增量的均值法(DELTA)、功率谱法(SPECTrum)、质量分布法(MASS)和毯子覆盖法(AERA)。
为简化计算以及便于计算机数字化处理,本文采用数盒子法(BOX)估计数据分数维Fd,得到数据的分形特征,具体过程如下。
设一维曲线F,利用边长为σ的方形区域毗邻的去包含F,令Nσ(F)代表能够包含F需要的最少的区域数目,则[12]:

经研究论证,Nσ(F)随方形区域边长σ选取的增大而减小,并满足指数关系[9]:

取对数得:

令
则分数维Fd即为此一次函数的斜率,为了计算分数维Fd,将包含一维曲线F的平面尽可能细分为由方形区域组成的网格,即放大为kσ网格(k=1,2,…,K,K 取充分大)。令 Nkσ(F) 为 kσ网格与曲线F交点的数目。通过最小二乘法求得此一次函数斜率,得到此曲线分数维Fd:
2 DNN识别空间目标结构算法与RCS特征提取
2.1 基于DNN算法的空间目标结构识别建模
DNN算法是机器学习的一种算法,以人工神经网络(Artificial Neural Networks,ANN)算法为基础,是人工神经网络的一个方向。
人工神经网络分为3层:输入层、输出层、隐藏层。其中输入层包含的单元接收外界输入,输出层包含的单元输出人工神经网络计算结果,隐藏层为不可视层。网络各单元之间通过权值连接,通过大量贴有标签的数据训练,采用梯度下降法不断调整权值的取值,调整内部大量单元之间相互连接的关系,最终达到在一定程度上模拟人脑神经系统的信息处理功能。人工神经网络具有以下3个特征:
1)非线性:非线性是大自然以及人脑的一种特性,为了在一定程度上模拟人脑功能,人工神经网络采用激活函数激活网络单元,并加入阈值,将线性问题转化为非线性问题。
2)非局限性:人工神经网络中包含众多神经单元,神经单元之间通过权值连接,所以输出的最终结果并不取决于某个神经单元,而是所有单元相互作用所决定。
3)非定常性:人工神经网络由数据驱动,随着神经网络处理的数据以及信息不断变化,网络单元间连接权值不断迭代更新,具有自适应性与自学习能力。
相比于一般的人工神经网络,深度神经网络突出特点在于其具备多个隐藏层,通常把含有两个以上的隐含层的多层感知器称为深度神经网络[8]。与深度神经网络相对的是浅层神经网络,如支撑向量机(Support Vector Machines,SVM)、Boosting、最大熵方法(Logistic Regression,LR)等。这些模型的结构基本上可以看成带有一层隐层节点(SVM、Boosting),或没有隐层节点(LR),所以较好,但是对于实际中较为复杂的问题处理结果并不理想。由于深度神经网络具有多个隐藏层,经过多个隐藏层对上一层的非线性变换,并且随着隐藏层数的增加,网络单元间每一条链路都是一条可学习训练的因果链,这意味着若使用相同网络单元,深度神经网络有远超过浅层网络的表达能力,对于复杂问题的处理能力更强[13]。
利用雷达测量的RCS及DNN方法识别空间目标的处理步骤如下:
1)将数据库中的空间目标RCS序列按照外形结构分类,并贴好标签。本文数据库采取设置一个地面站对不同结构空间目标进行多圈观测的方法获得。
2)从以上数据库中随机选取10%作为测试数据,其余作为训练数据。
3)对于训练数据RCS数据进行处理,获取代表这段RCS序列的特征向量E。数据处理见第 2.2 节。
4)初始化神经网络,设置神经网络参数,包括输入参数个数、隐含层个数以及输出层个数等。
5)为了神经网络收敛,将特征向量集Ei,i=1,2,…,M{}(M为训练样本数)标准化,将标准化特征向量以及相对应标签输入神经网络,训练至误差小于阈值或达到迭代步数,得到训练好的神经网络分类器并保存。
6)按照步骤3)处理测试数据得到测试数据特征向量,输入步骤5)得到的神经网络分类器进行识别分类。
2.2 RCS特征向量提取方法
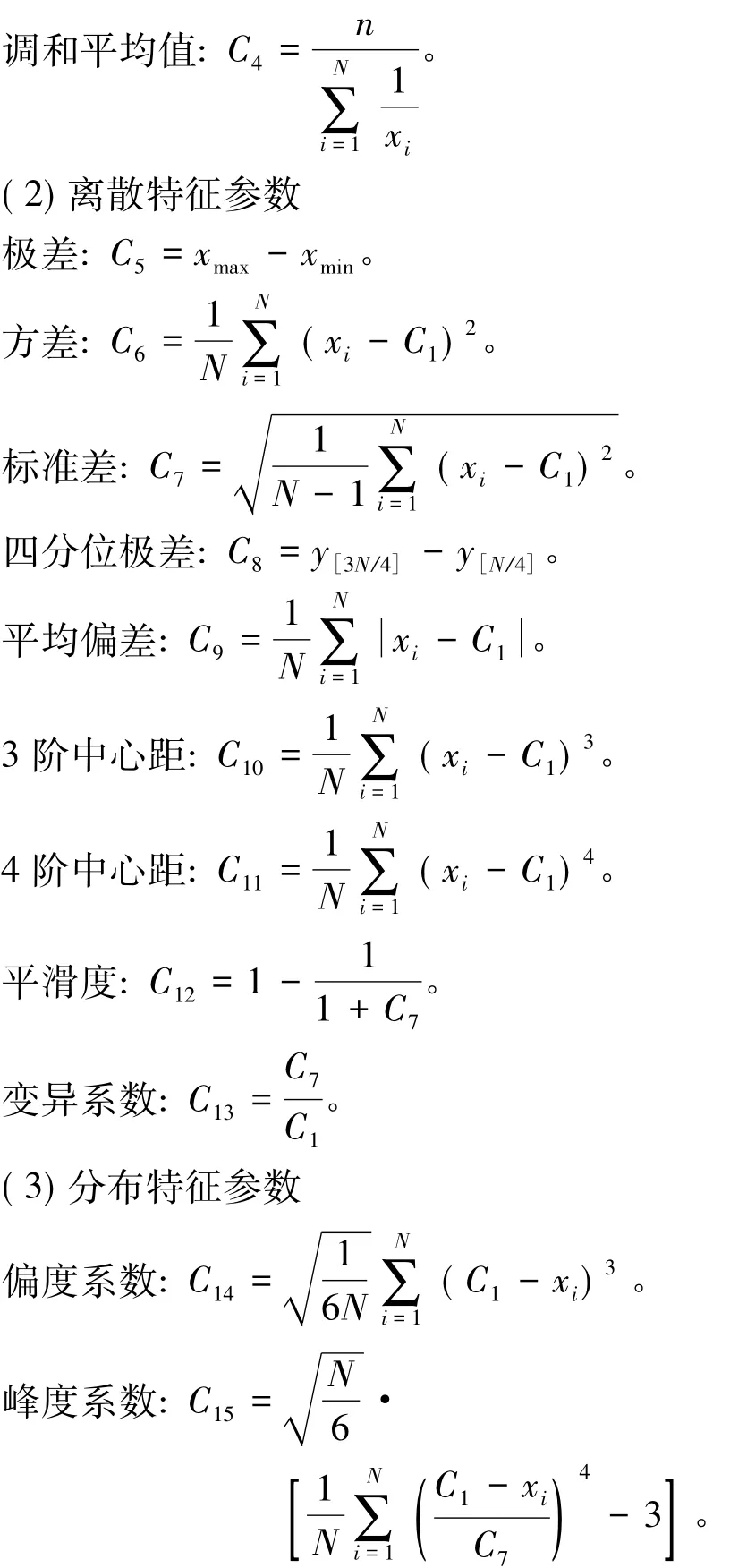
目前利用RCS序列进行目标识别所提取的特征值分为如下几类[14]。
(1)位置特征参数
中位数:C2=y[N/2],y为序列x从小到大排序得到的新序列。
2.3 Fisher判别
为保证选取的特征值具备区分度,并且减少所选特征向量的纬度,防止神经网络训练过程中过拟合的现象,应用Fisher判决率对第2.2节的特征值进行选取。Fisher判决率是一种基于类内距离最小(稳定性)、类间距离最大(可分性)的特征选择准则,是一种经典的特征评价准则[15-16]。
设有C类目标wi(i=1,2,…,C),每类目标包含K个样本,fik(n)表示第i类目标的第n个特征分量的第k个样本,则第n个特征分量的Fisher判决率定义为:

式中:μ为特征的均值,σ2为特征的方差。
3 仿真验证
本文选用3类空间目标典型简化模型进行结构识别,分别为三轴稳定简化目标(目标1)、球体目标(目标2)、圆锥体目标(目标3),如图2所示。其中目标1为中心是边长1 m的立方体,两侧翼板为长3m、宽1m的矩形;目标2为底边半径0.5m、高1.5 m的圆柱;目标3为底边半径0.5m、高 1.5m 的圆锥。
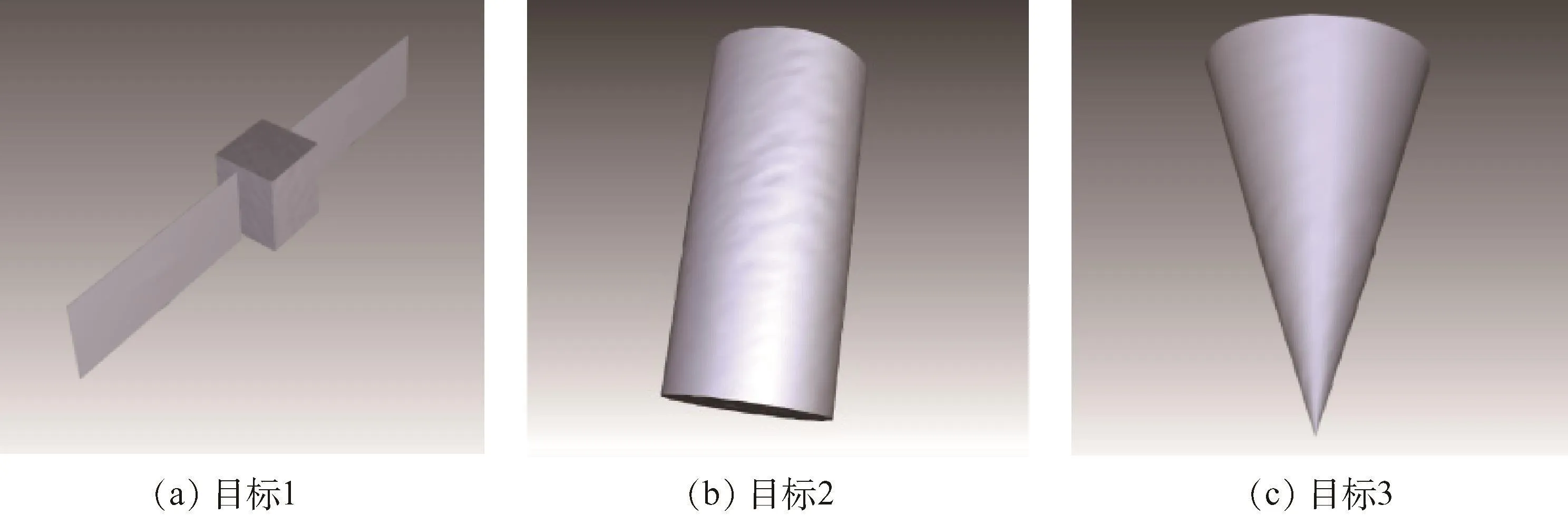
图2 空间目标模型Fig.2 Space target model
本文采用基于改进 Gordon方程的RCS快速算法进行目标RCS仿真,此算法对模型面元进行预处理,提高了运算的效率,并且与RadBase软件仿真数据进行对比,一致性较好[17]。结合STK姿态动力学模块,产生目标位置、姿态数据,并换算成目标坐标系下雷达的入射俯仰角和方位角信息,快速生成RCS动态序列。目标轨道参数如表1所示。
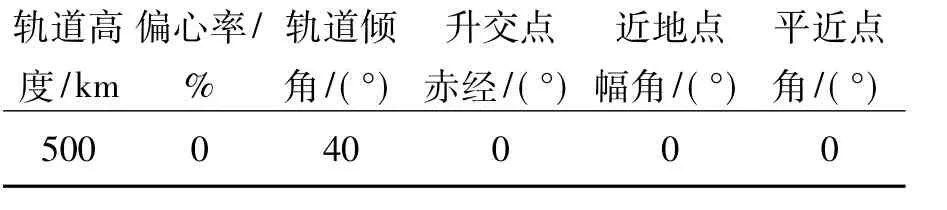
表1 目标轨道参数Table 1 Target orbital parameters
雷达探测距离设置为2000 km,雷达布置在北纬40°,东经120°。为保证目标处于光学区,设置观测雷达处于 L频段,雷达波频率为1.2GHz。为了验证本算法的可行性,设置仿真时间1个月。最终目标被雷达观测到127次,对3种结构目标进行观测,共得到381组RCS序列。按照第1.2节方法对数据进行处理,得到3种结构目标RCS序列的分形盒维数特征,如图3所示。
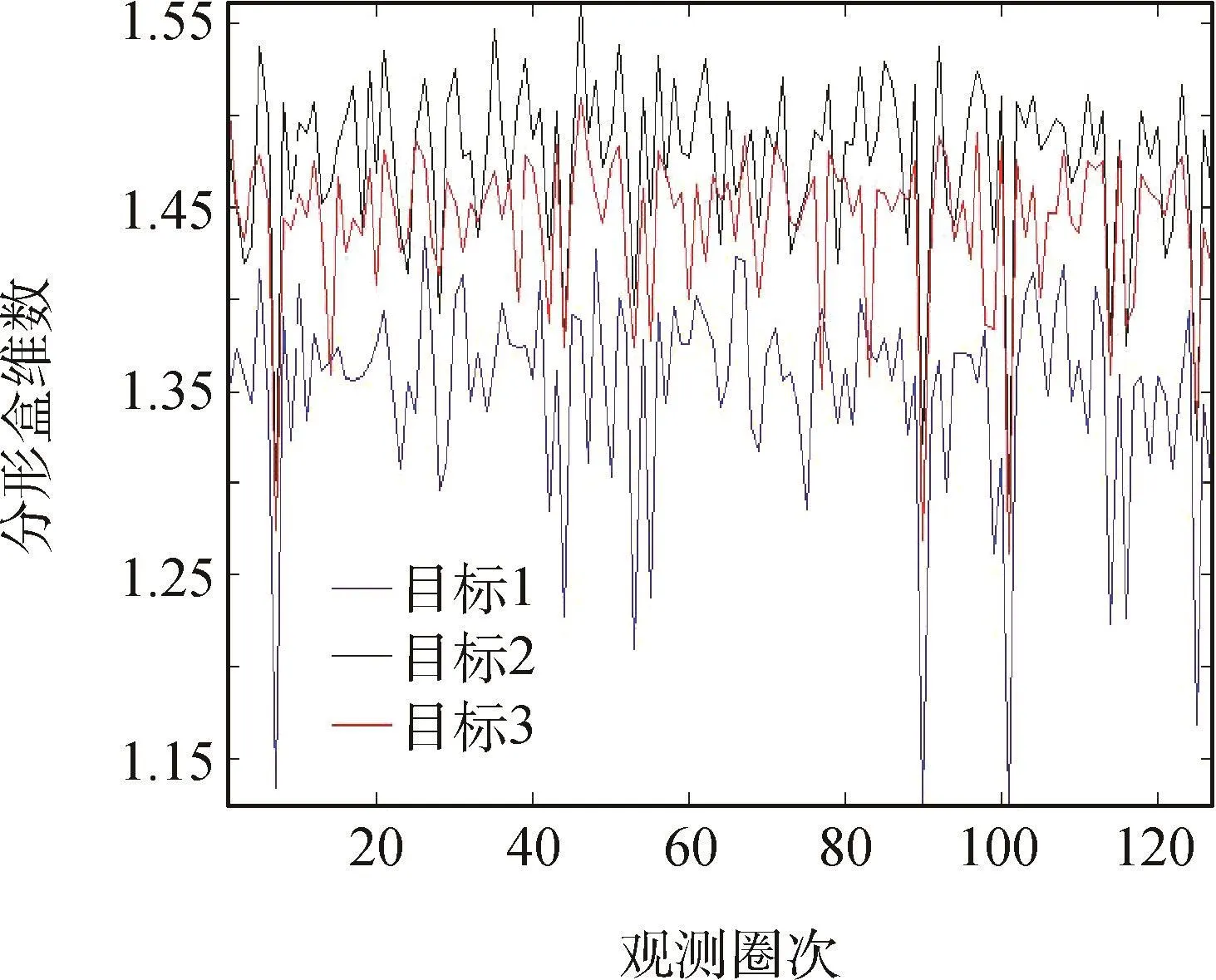
图3 RCS序列分形盒维数Fig.3 RCS sequence fractal box dimensions
由图3可以看出,对于不同结构的空间目标,其RCS序列的分形盒维数差异较为明显,具备一定的区分度,可以作为空间结构识别的特征值。
由表2可以看出,在各个特征值中,空间目标RCS序列的分形盒维数、平均值、中位数、切尾平均数以及方差Fisher判别率较高,说明其特征区分度高,有利于对空间目标结构进行分类。故本文选取分形盒维数、平均值、中位数、切尾平均数以及方差5个特征值组成特征向量,作为神经网络输入进行空间目标结构识别,神经网络隐藏层设置为3层,每层12个神经元。分类结果如图4(a)所示。不对特征值进行选取应用,根据文献[8]的方法,选取第2.2节15个特征值组成特征向量数据处理如图4(b)所示。按照第2.2节方法对数据进行处理。利用第2.3节的Fisher判别率对以上特征以及分形特征进行计算,选取特征向量各维度特征值,Fisher判别率如表2所示。

表2 各特征Fisher判别率Table 2 Fisher discriminant rate of the feature
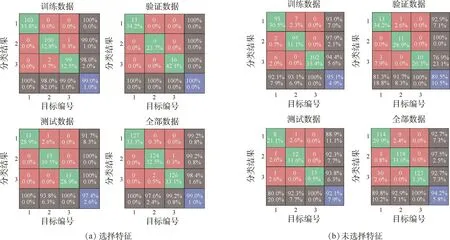
图4 识别结果Fig.4 Recognition result
由图4看出,对于传统特征进行选择以及加入分形特征,经过神经网络训练后在验证识别率以及整体识别率方面都有显著提升。
为了验证神经网络算法在噪声干扰下的表现,本文在上文数据的基础上分别加入针对0dBW信号信噪比为10dB、5dB以及0dB的高斯白噪声,选取目标1第一次观测数据进行效果展示,为了便于观察,取前100s数据,如图5所示。
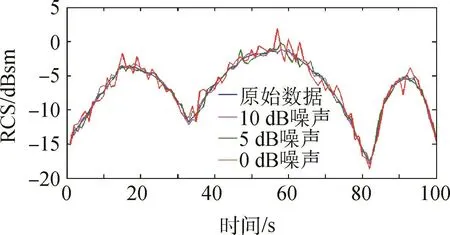
图5 不同信噪比信号Fig.5 Different signal to noise ratio signals
利用上文构建的深度神经网络模型对上述加入噪声的RCS数据进行识别,结果如图6所示。
加入噪声后,识别正确率有所下降,这也符合实际。虽然加入了噪声,但是在3种信噪比的情况下,验证数据的识别率在94%左右,整体识别率也在96%以上,识别率相比较不加噪声下降较小,体现了利用神经网络算法进行空间目标结构识别这一方法具有较强的抗干扰能力。
此外,为了验证本算法在不同轨道下的表现与稳定性,在表1的基础上将轨道高度分别改为400km、450km、550km以及600km,获得3种结构目标共1911组的RCS序列。识别结果如图7所示。
可以看出,在加入了不同的轨道数据的情况下,本算法的验证数据识别率为95.8%、整体识别率为95.3%,体现了本算法的稳定性与鲁棒性,具有泛化能力,并不针对特定情况,具有一定的实际应用价值。
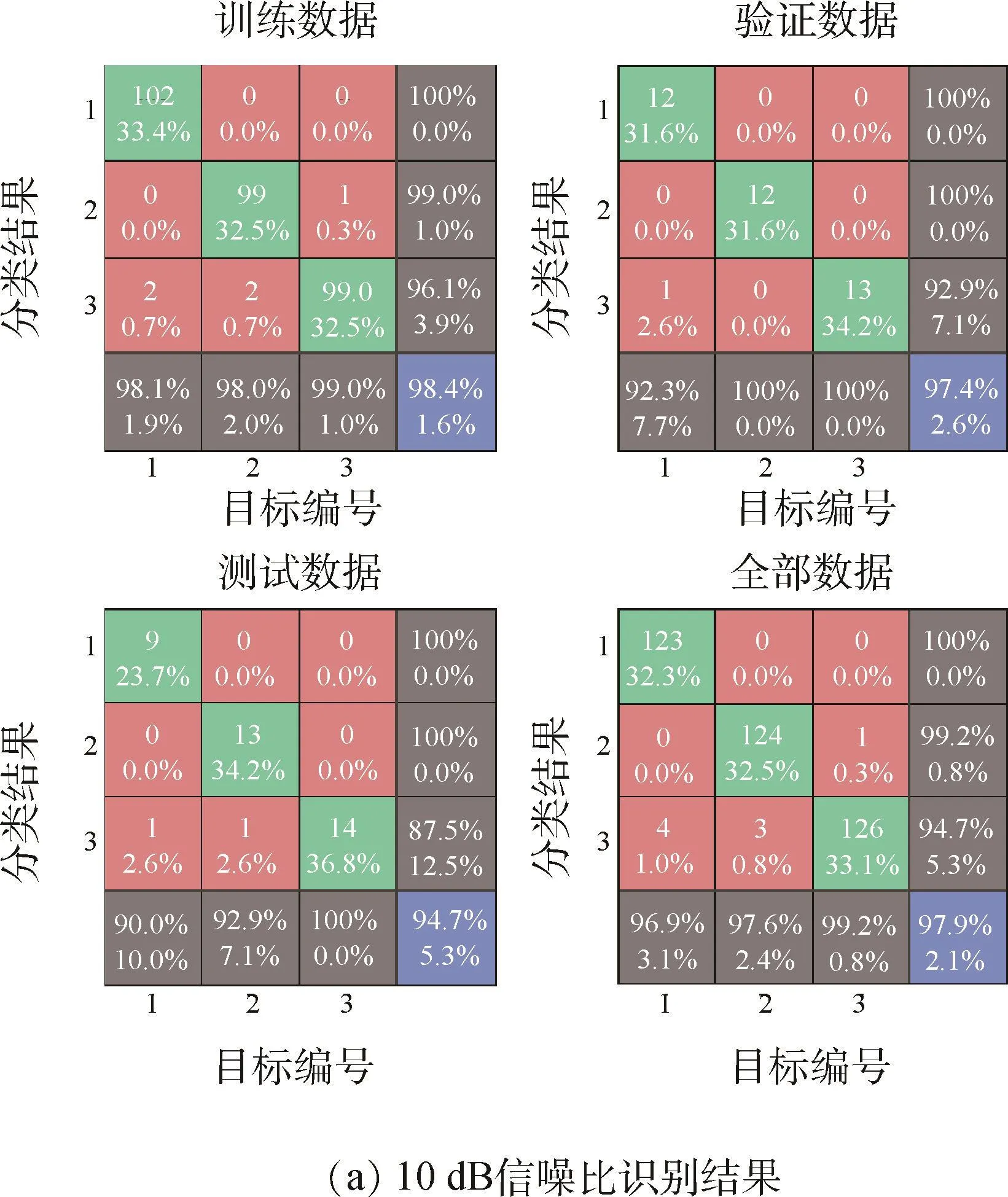
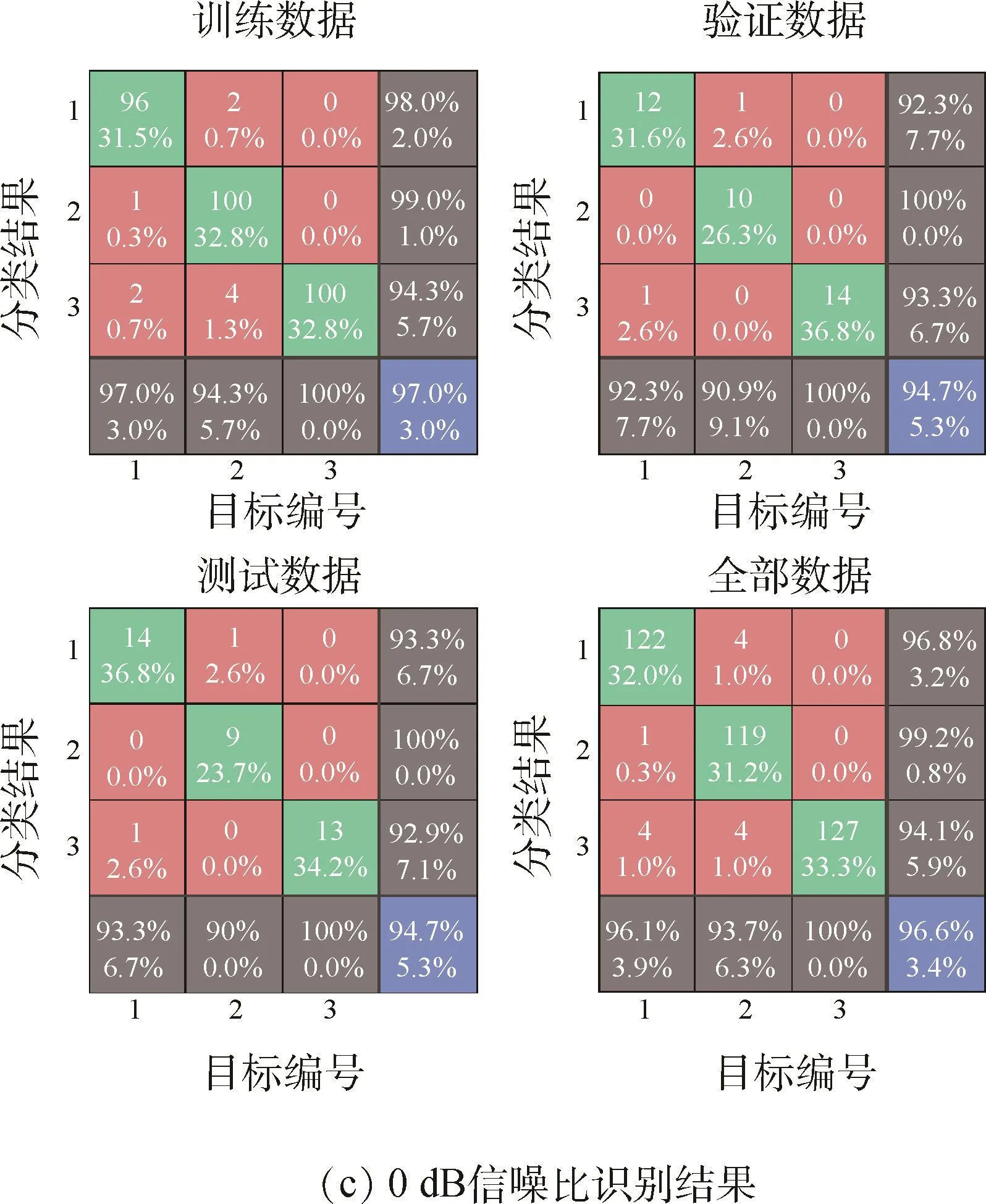
图6 加入噪声识别结果Fig.6 Recognition results with noise
4 结束语
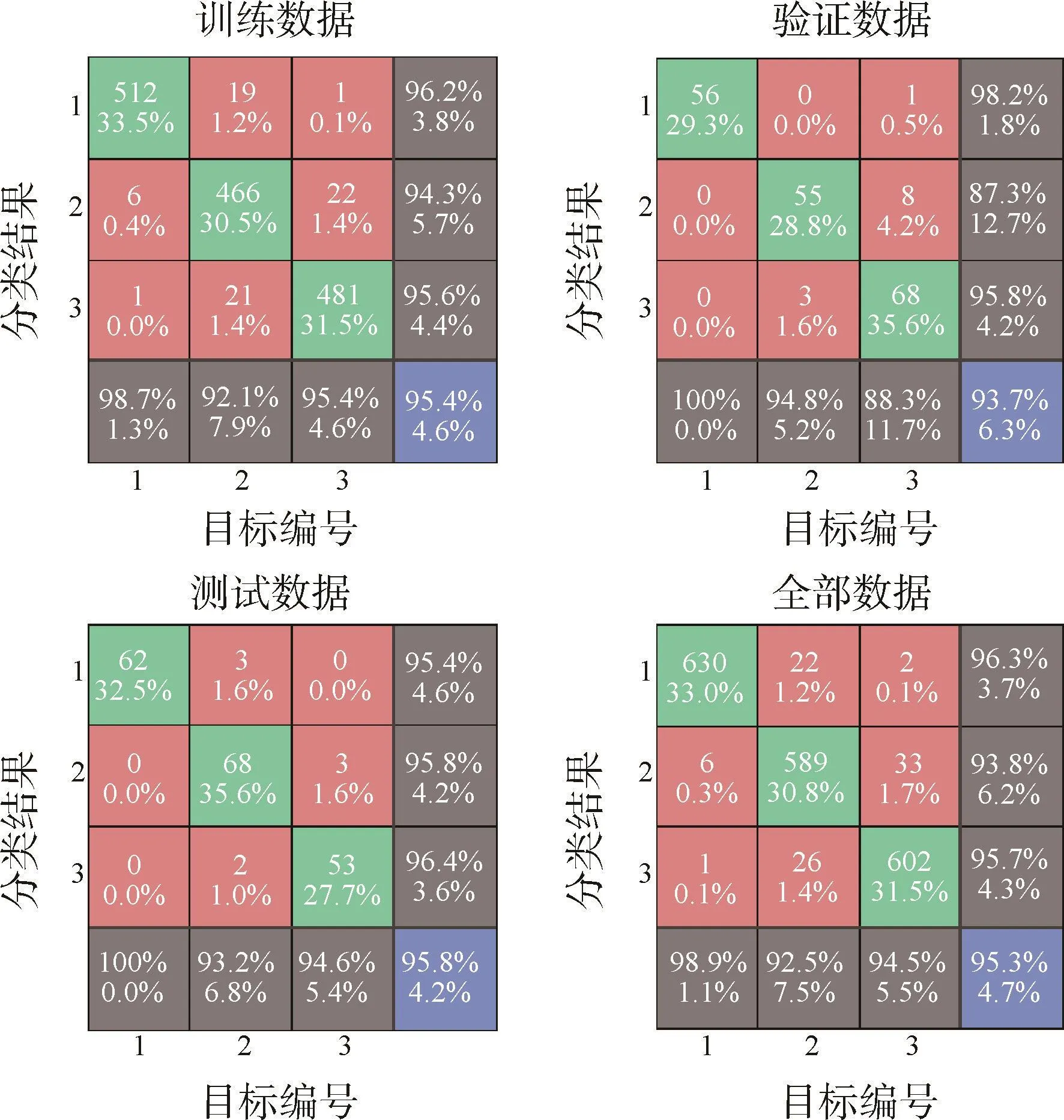
图7 5条轨道数据识别结果Fig.7 5 track data recognition results
空间目标结构识别是空间态势感知的重要组成部分,本文提出利用DNN算法处理空间目标动态RCS序列,从而达到空间目标的结构识别的目的。为了提高识别率以及消除过拟合现象,将分形盒维数作为特征值,并且通过Fisher判别率对特征值进行选取,通过仿真数据验证,本文算法在解决空间目标结构识别方面算法稳健、鲁棒性好、识别率较高。所获得的成果可用于对RCS序列的研究以及对空间目标分类与识别,有利于进一步确定目标属性,提高态势感知能力。
猜你喜欢
工程科学学报(2022年11期)2022-10-14
保定学院学报(2022年2期)2022-04-07
辽宁丝绸(2022年1期)2022-03-29
中学生理科应试(2021年11期)2021-12-09
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
动漫星空(兴趣百科)(2020年11期)2020-11-09
科学Fans(2019年2期)2019-04-11
数学学习与研究(2018年15期)2018-11-12
课程教育研究·新教师教学(2016年18期)2017-04-12
科技经济市场(2014年11期)2014-12-30