
深水S型铺管船托管架托辊非均匀接触力分析
2019-05-15 07:28闫宏生王兆山卫大兴
中国海洋平台 2019年2期
闫宏生, 王兆山, 卫大兴
(1.天津大学 水利工程仿真与安全国家重点实验室, 天津 300072; 2.高新船舶与深海开发装备协同创新中心, 上海 200240)
0 引 言
深水铺管船作为深海油气田开发的主要施工设备,其担负着海底管道敷设及立管系统安装等任务[1],开展相关性能研究具有十分重要的意义。对于深水S型铺管船托管架托辊接触力的研究,国内外已有诸多成果。宋林峰等[2]应用管线与托辊之间的接触机理并结合数值计算模拟托管架、船体及管线的耦合作用。朱晓环等[3]应用半实物半仿真的混合试验方法开展对托辊载荷及A型架受力特征的分析并提出托辊的动力响应所引起的结构疲劳问题。孙丽萍等[4]基于集中质量法,推导深水S型铺管的管线受力计算公式,建立三维数值模型,并用广义积分求解方程,得到的结果与相关软件计算拟合良好。谢鹏等[5]基于dSPACE仿真平台模拟S型管道敷设过程,并开展中大尺度比管道与托辊接触力研究。王文伟等[6]开展梁悬垂状海洋管线数值建模和分析方法的研究。综合来看,托辊非均匀接触力的研究主要涉及数值计算及试验模拟,但数值计算一般不能充分考虑到船舶、托管架及管线的耦合运动对托辊载荷的影响,同时试验模拟在托管架与管线耦合方面具有优势,但由于托管架与船体之间的载荷传递极其复杂,难以进行较好的模拟,因此本文基于两方面的研究理论,开展一种新型托辊非均匀接触力分析方法的研究。
1 计算模型构建
1.1 深水铺管船简介
“海洋石油201”(以下简称“HYSY 201”)是中国海洋石油工程股份有限公司旗下的全电力推进深水铺管起重船(Deepwater Pipelay Crane Vessel, DPV),具备超深水3 000 m铺管能力、4 000 t起重能力及DPS动力定位系统,铺管作业方式为S型铺管[7]。“HYSY 201”船长204 m,船宽39.2 m,型深14 m,其艉部连接托管架结构。托管架结构为铰接式可变半径托管架,由3节截面为三角形的空间桁架结构组成,A型支架悬吊点位于第一节管架末端,各节管架支撑上的托辊可根据敷设管线形态自行调节相对位置[8] 。
1.2 SESAM构建水动力模型
基于DNV SESAM的GeniE模块建立铺管船船体及托管架结构模型[9]。导出相应储存“.fem”文件后,船体模型以板单元模型、托管架结构以Morison模型形式导入在HydroD模块中建立的Wadam Composite Model程序进行相应的水动力分析。铺管船SESAM模型如图1所示。

图1 铺管船SESAM模型
1.3 OrcaFlex构建铺管作业模型
在SESAM建模基础上,在OrcaFlex加入所敷设管线的模型结构,管线形态采用悬链线法进行模拟,管线数据如表1所示。由于在OrcaFlex中建模分析的重点为托辊与管线结构的接触力问题,故须将托管架结构的横杆及弦杆进行简化,并以V型Pipe连接结构模拟托辊结构,同时建立同一支撑结构上相邻V型托辊结构与Link的组合模型,以达到V型托辊可自行调整位置的要求。铺管船OrcaFlex模型如图2所示,各托辊中心初始位置如表2所示。托管架与船体连接形式为铰接,托管架铺管角度由软件中Pipe及Link单元组合构建的A字架结构进行调整,敷设管线可由Winch单元提升至托辊以上并以设定速度放置于相应托辊支撑上。

图2 铺管船OrcaFlex模型
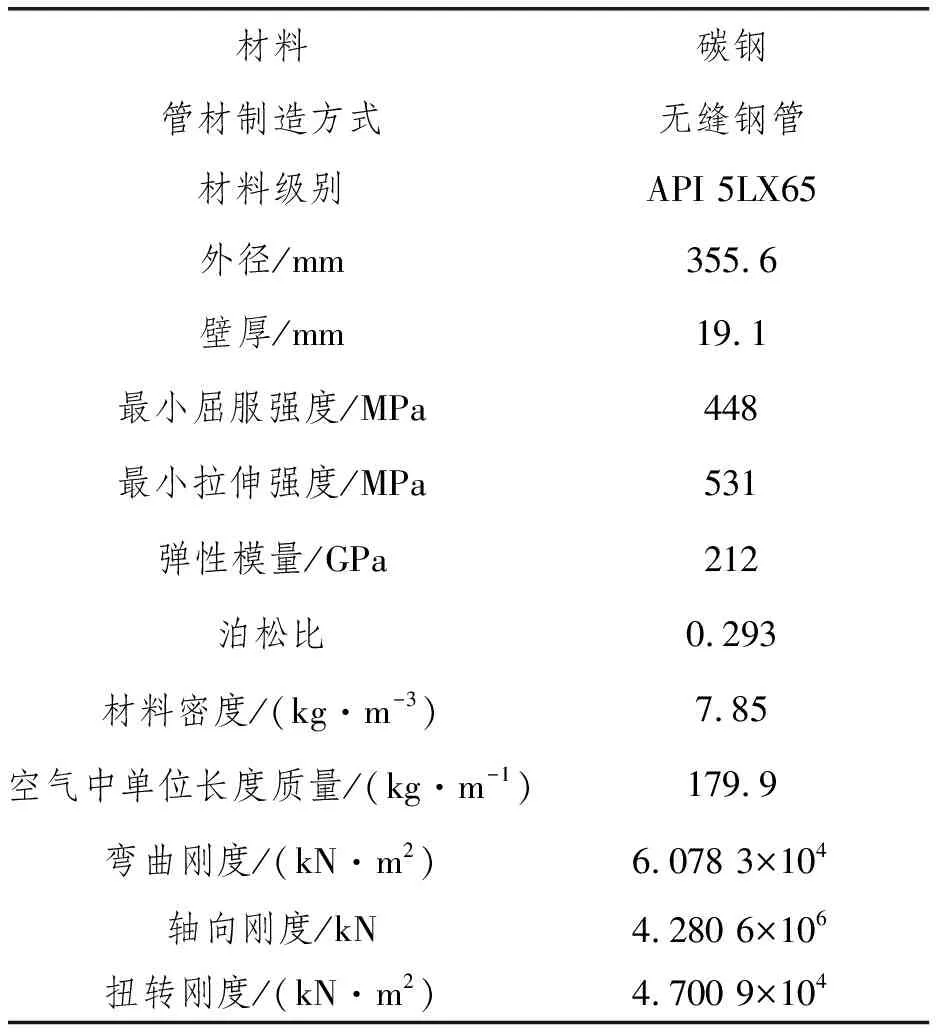
表1 管线数据
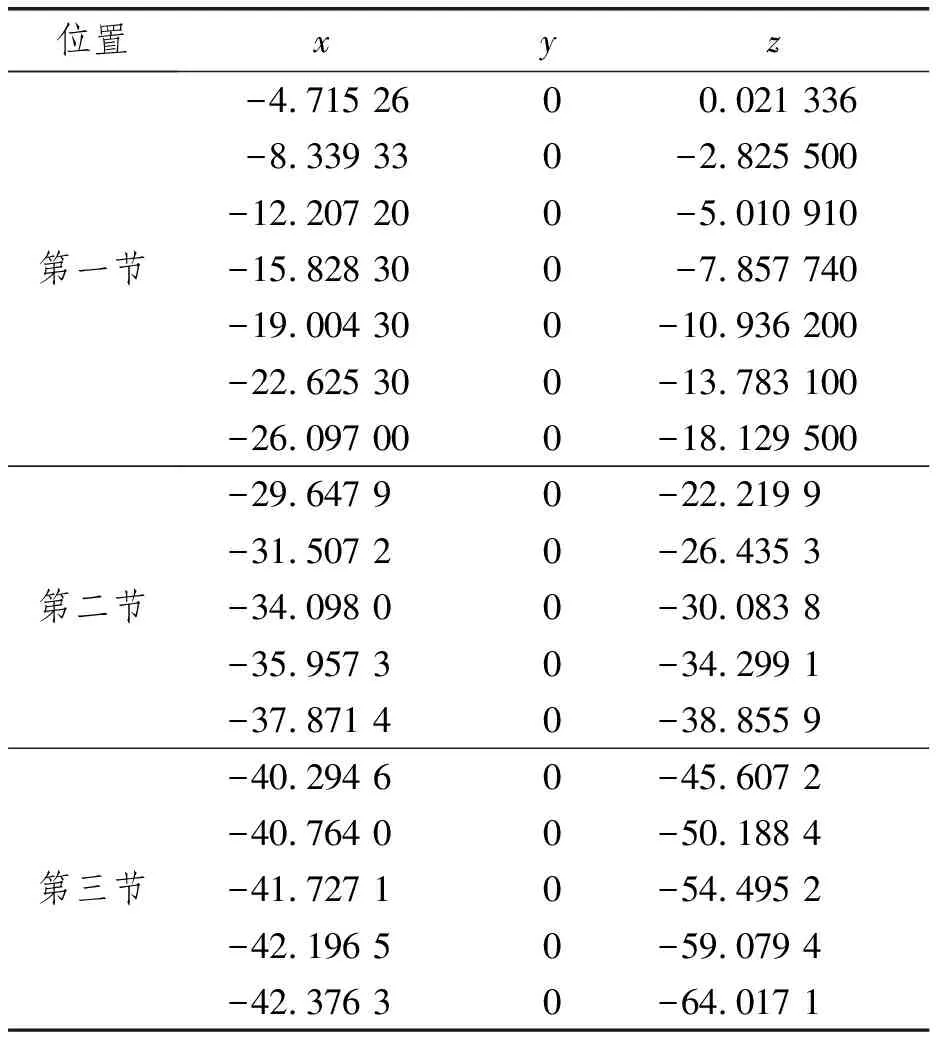
表2 托辊中心点坐标 m
2 模型分析及计算
2.1 幅值响应算子计算
在HydroD模块中计算船体与托管架联合体的幅值响应算子(Response Amplitude Operator, RAO),历经周期设定为1~35 s,间隔1 s,覆盖了铺管船服役海域的所有特征周期,波浪方向设定为0°~180°,间隔22.5°,得到各浪向下的RAO(由于“HYSY 201”铺管船拥有DP 3动力定位系统,因此船体横荡、艏摇及纵荡等3个自由度运动可以忽略),并以其作为媒介将船体与托管架联合体的运动响应传递到OrcaFlex中的船、托管架及管线的耦合模型中。
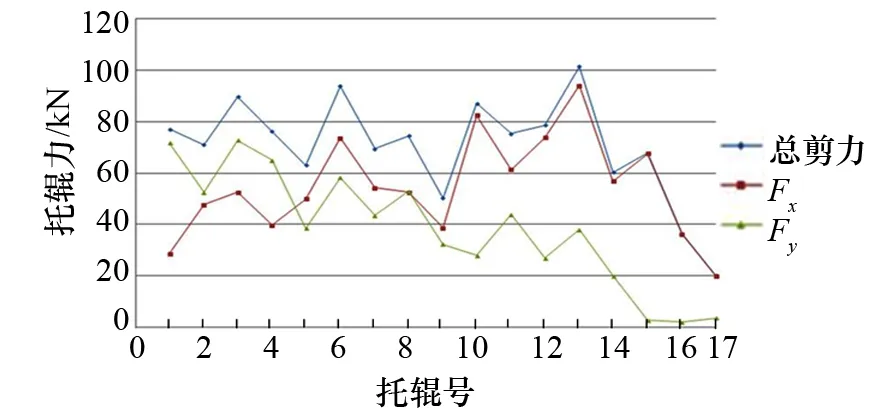
图3 1~17号托辊接触力
2.2 OrcaFlex静态接触力分析
在OrcaFlex中对耦合模型进行静力分析时,载荷情况只考虑重力、浮力和托管架、船体及管线3者之间的接触力。在分析过程中模拟管线放置到相应托辊位置,同时Winch结构消失,待系统平衡后得到各托辊接触力的时间历程曲线。时间历程设定为500 s,时间步长设定为0.01 s,对各托辊接触力在200~500 s的稳定阶段进行统计,得到各托辊接触力统计平均值,如图3所示。
2.3 OrcaFlex动态接触力分析
在进行动态接触力分析前,将由HydroD 模块计算出的RAO文件导入OrcaFlex的Displacement RAO文件中作为耦合模型的动力响应条件。为探究各工况下动态接触力的分布特征及动力响应特征,选取“HYSY 201”的敷设条件为JONSWASP随机波浪谱条件,极限工况:有义波高Hs=3.0 m、谱峰周期Tp=6.0~9.0 s(即JS 3.0×6.0~JS 3.0×9.0),其他工况选定为JS 2.5×8.2、JS 2.0×7.3、JS 1.0×5.2以及JS 0.5×3.7[10]。动态分析过程设定模拟时间历程为500 s,时间步长为0.01 s,所得各工况下的托辊接触力以时间历程200~500 s稳定阶段为统计依据。
3 对比分析
对比分析过程采用以控制变量为基础的横纵对比方法进行托辊接触力分析:首先比对在同一浪向下,JS 3.0×9.0、JS 2.5×8.2、JS 2.0×7.3、JS 1.0×5.2及JS 0.5×3.7海况下的托辊接触力发现,在200~500 s的稳定范围内,各海况条件下的托辊接触力大小变化幅度在静力分析结果±1 kN的量级范围内波动。同时,比对在同一浪向、同一有义波高下,不同谱峰周期(JS 3.0×9.0、JS 3.0×7.5及JS 3.0×6.0)对托辊接触力的影响发现,托辊接触力大小变化幅度很小,仅在由谱峰周期的不同而引起的接触力幅值振动频率方面有所差异。随后,以JS 3.0×9.0海况为基础,横向比对各浪向下托辊接触力的分布差异,以托辊1位置为代表,其在各浪向下的接触力时程曲线如图4所示。

图4 各浪向下的托辊接触力时程曲线
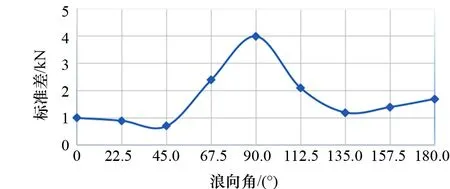
图5 标准差随浪向角变化曲线
在200~500 s平稳阶段进行各浪向下的数据统计分析,数据均值大小近乎一致,整体围绕在75 kN±1 kN量级左右。数据的标准差随浪向角变化如图5所示:在浪向为90°时出现标准差的峰值,并且在45°~90°角度增加过程中,平稳阶段的接触力波动逐渐增加。从图5可看出在90°浪向下,幅值波动达到了25 kN。这是由于铺管船长期作业于90°浪向海况下,极大可能使得托管架结构产生低周疲劳问题,进而使得结构发生疲劳损伤甚至破坏,因此在托管架结构强度校核及疲劳评估阶段须充分考虑此现象的发生。
在海况JS 3.0×9.0、90°浪向条件下,为进一步探究托辊接触力产生较大波动的原因,将Displacement RAO中的垂荡、横摇及纵摇分别进行考虑。单一自由度接触力响应如图6所示。

图6 单一自由度接触力响应
通过分析各单自由度下稳定阶段的接触力幅值波动变化规律可看出,在铺管作业过程中,引起接触力大范围波动的原因主要是铺管船的垂荡运动,纵摇及横摇运动对接触力波动范围的影响较小。
4 结 论
通过对托辊接触力的静力、动力及对比分析,可得出以下结论:(1)托辊接触力在3、6、10及13号托辊位置时幅值较大,即分布在A字架吊点位置、各节托管架的相接位置以及管架结构的弧中心位置。(2)在铺管船所服役的海域内,其正常海况条件的变化不会引起托辊接触力的大幅度变化,特殊海况除外。(3)在以浪向为单一变量的同一海况条件下,托辊接触力统计数据均值不会受浪向变化的影响,而接触力统计数据标准差(即波动情况)受浪向变化影响明显,90°浪向下会产生较大数量级的幅值波动。经分析计算后得出,幅值波动主要受船舶垂荡运动影响,同时在托管架结构疲劳问题上应充分考虑此海况下的动力响应波动引起的低周疲劳问题。
猜你喜欢
海洋通报(2022年3期)2022-09-27
机械工业标准化与质量(2022年5期)2022-08-12
汽车实用技术(2022年13期)2022-07-19
机械管理开发(2022年6期)2022-07-14
军事护理(2022年4期)2022-05-08
起重运输机械(2021年23期)2021-12-21
装备制造技术(2020年3期)2020-12-25
中国设备工程(2020年15期)2020-07-29
中国特种设备安全(2019年1期)2019-03-13
科技视界(2017年18期)2017-11-16
