
快速傅里叶变换在阿秒束线光路稳定控制中的应用*
2019-11-08 08:45江昱佼高亦谈黄沛赵昆许思源朱江峰方少波滕浩侯洵魏志义
物理学报 2019年21期
江昱佼 高亦谈 黄沛 赵昆 许思源 朱江峰 方少波 滕浩 侯洵 魏志义‡
1) (西安电子科技大学物理与光电工程学院,西安 710071)
2) (中国科学院物理研究所,北京凝聚态物理国家研究中心,北京 100190)
3) (中国科学院大学,北京 100049)
4) (中国科学院西安光学精密机械研究所,西安 710119)
本文报道了将快速傅里叶变换算法应用于抽运探测系统和倍频光谱干涉系统(f−2f interferometry),对光路进行反馈控制的原理和结果,分别得到相对臂长抖动均方根1.24 nm (对应时间为4.1 as)的抽运−探测光路锁定和积分时间3 ms下相对相移均方根227 mrad的慢环载波包络相位(carrier envelop phase,CEP)锁定.这样的锁定精度可以保证产生阿秒脉冲的飞秒激光脉冲拥有稳定的CEP,并且为后续阿秒抽运探测提供了稳定的实验条件.
1 引 言
20世纪80年代,皮秒和飞秒超快激光飞速发展,为电子学和光学构筑了桥梁[1],带来了大量的技术革新,例如位于光频率和电子频率之间的太赫兹波段的产生[2].对于更快的电子运动,例如忽略量子效应时周期约为150 as的电子在玻尔半径上绕氢原子核的运动,飞秒激光无法探测.2001年,阿秒脉冲首次在实验上得到证实[3],经过十几年的参数提升[4−6],阿秒激光不断将人类带入全新的超快世界,阿秒条纹相机(attosecond streak camera)[7]、离子速度成像[8]、冷靶反冲离子动量谱[9]实验让原子尺度下电子动力学过程的时域演化研究得以实现.近年来固体高次谐波[10]、凝聚态材料条纹相机(例如使用时间飞行谱仪和阿秒瞬态吸收光谱方法[11])的发展将阿秒研究推向下一代进程,丰富的电子带内运动、带间跃迁、干涉以及和晶格作用(例如描述晶格整体运动的慢声子和晶格独立振动的快声子)被研究和验证.所有的这些高分辨率的实验都要求使用稳定的阿秒脉冲或者脉冲串,用于抽运的激光必须和探测光保持极高精度的可调延时,无论是载波包络相位(carrier envelop phase,CEP)锁定[12]、平衡光学互相关测量技术[13],还是后期抽运探测实验[14]的实施都要对光学器件的振动和实验室环境导致的相位慢漂进行控制.2016年,Kaldun等[15]使用抽运探测的方法在时间上重建了自电离共振的演化,他们的臂长差抖动在时间上约10 as.2019年,Ishii等[16]在薄片组展宽后锁定CEP,在2000 s内单发(采集间隔1 s)测量的CEP抖动的均方根为101 mrad.本文介绍一种通用的锁定机制,包括原理和在实验室中的实现.
2 算法介绍
2.1 快速傅里叶变换
在分析时间或空间域的连续和离散信号时,为了透过杂乱的信号看到更直观的本质信息,并且找出想要研究的频率成分进行解析或者加密,通常要对时间域的信号进行傅里叶变换.设有限离散函数x(n),n=0,1,2,··,N-1,则其傅里叶变换函数为
X(k)的傅里叶逆变换为x(n),

这种离散傅里叶变换和逆变换的时间复杂度是N2.实际应用中采样点经常很多,庞大的计算量导致计算效率低下,可能导致数据堆积.为了简化计算,出现了若干种分支计算方式,例如离散余弦变换和离散正弦变换,在这里当N很大时计算量依然巨大,基本的傅里叶变换不现实.
1965年,Cooley和Tukey[17]充分利用了傅里叶变换的周期性和对称性以及蝴蝶操作对展开项合并,大幅度提高了计算效率,将时间复杂度O(N2)的运算量降低为O(2Nlog2N)量级.应用广泛的计算软件例如matlab和labview均采用了快速傅里叶变换算法.
2.2 傅里叶变换在稳定反馈中的应用
对于数据处理软件来说,较为稳定的干涉条纹在某一时间t0下为一个一维数组,由f(x,ϕx,t0)表示,可以写成不同频率成分g(ω,x,ϕω,x,t)在t0时刻对ω的积分,

为了稳定干涉条纹,需要对条纹中主要的信息频率成分进行研究.利用f(x,ϕx,t0)的傅里叶变换F(ω,φω,t0),可以从一个随时间变化的干涉条纹得到随时间变化的功率谱(实部)和相位谱(虚部).功率谱中最强的零级成分(直流成分)和较弱的成分均可看为背景噪声,选择高信噪比的一级频率成分,对此段功率谱峰值位置对应的频率进行锁定,可以保证干涉条纹的精确锁定.此时一级频率成分的傅里叶逆变换为f1(x,φx,ω1,t0) ,ω1为一级中心频率.若干涉条纹精确锁定,不同时间t下φω1均接近,平均值将是一个稳定值,反之亦然.
3 实验应用及锁定结果
3.1 使用单频连续激光进行抽运探测光路的锁定
极紫外(extreme ultra−violet,XUV)抽运探测在研究分子原子能级结构和动力学有着广泛的应用[18],在实验中要求抽运光和探测光的延时可调,步长精确至阿秒量级,这就要求两臂相对位置精确锁定.为此,我们在光路中加入较弱的532 nm连续激光.
当频率为ω,传播常数为k的平面波

通过马赫−曾德尔干涉仪后,干涉平面的电场强度可表示为

这里E1和E2分别为两路光电场矢量,τ是两臂光程差.合成场的光强为

其中,θ是E1和E2的夹角,ϕ是θ和τ的函数.所以以上方程可写为

可见光强包含非相干叠加项I1和I2,而干涉项f(θ,τ)是θ和τ的函数.当干涉仪处于较为稳定的状态时,θ可看作保持不变,干涉条纹的变化是由于τ的改变,当τ锁定,干涉条纹保持稳定.也就是说,可以通过干涉条纹的稳定性来评估光路锁定的效果.
实验装置如图1,分束片分别将近红外(near infrared ray,NIR)脉冲激光和扩束后的532 nm连续激光分成两路,一路较强的NIR用来产生XUV光,金属膜滤除残留的NIR,XUV经过轮胎镜聚焦到时间飞行谱仪(time of flight,TOF)入口附近;另一路较弱的NIR作为抽运信号通过用于调节本路光臂长的精密平移台,经过打孔镜与XUV复合,进入时间飞行谱仪.与此同时,一路绿光从金属膜边缘通过,在打孔镜表面反射,另一路伴随着作为抽运光的NIR穿过打孔镜,这两束绿光经过透镜放大后光斑在电荷耦合器件(CCD)上重合.这个系统中,CCD是软件控制系统的信号输入硬件,调节光程的压电陶瓷(piezo transducer,PZT)精密平移台根据软件反馈对光路相对长度精确锁定并调节延时.

图1 抽运探测实验示意图 (m1−m15,平面高反镜;f1,平凹透镜;f2,f3,凸透镜)Fig.1.Sketch of the pump−probe setup (m1−m15,flat mirror;f1,flat−concave lens;f2,f3,convex lens).
为了对光路锁定系统的可行性进行验证,搭建了如图2所示的测试光路.测试光路与抽运探测实验光路原理相同,一束532 nm绿光扩束后进入马赫增德尔干涉仪,M3和M4放在平移台上调节臂长,偏振片P和半波片配合调节光强.另一路M7放在PZT平移台上,两路光通过打孔镜复合,聚焦在CCD上.
编写了labview程序实现光路的反馈控制.该程序通过采集卡取得CCD上的干涉条纹阵列,对条纹做纵向积分得到随时间变化的f(x,ϕx,t),将计算得到的偏移量输入到比例−积分−微分(proportion integration differentiation,PID)控制模块和数模转换器,获得输出到PZT平移台的电压值;通过调整x范围、纵向积分范围、快速傅里叶变换一级频率选择范围、PID参数等降低相位的快速抖动和慢漂导致的偏移量从而得到稳定的并且可以长时间锁定.图3为12 h的锁定结果,锁定后两臂(单臂长约1 m)光程差抖动的均方根(root−mean−square,RMS)为1.23 nm(14.6 mrad).如此精密的锁定,不仅可以在阿秒产生测量装置中发挥重要的作用[19],还能给非共线抽运探测实验提供阿秒量级的稳定性[20].

图2 用532 nm连续激光干涉锁−定光路示意图(M1,凹透镜;M2,凸透镜;BS,分束片;M3M10,平面银镜;P,偏振片;λ/2 ,半波片;FL,凸透镜;CW,连续)Fig.2.Arm length stabilization of a Mach−Zehnder interfer−ometer (M1,concave lens;M2,convex lens;M3−M10,plane mirrors;P,polarizer;λ/2 ,half wave plate;FL,focusing lens;CW,continuous wave).

图3 用532 nm连续激光干涉锁定12 h的稳定性,其中均方差为14.6 mrad,插图为未锁定下的相对相位漂移Fig.3.Interferometer locking stability over 12 hours.Inset is the relative phase drift when armlength is not locked.
3.2 倍频光谱干涉锁定载波包络相位
CEP是脉冲包络最高点附近载波电场的峰值相对于脉冲强度包络最高点处的相位偏移.对于中心频率ω0,脉宽τ的高斯脉冲的电场E(t)可表示为

其中ϕCE即为CEP,该值直接影响周期量级脉冲的实际电场形状,如图4所示.因此在周期量级脉冲与物质相互作用的过程[21],如高次谐波以及阿秒脉冲的产生、阈上电离[22]、探究原子分子运动过程等研究中,CEP及其稳定性是重要参数.
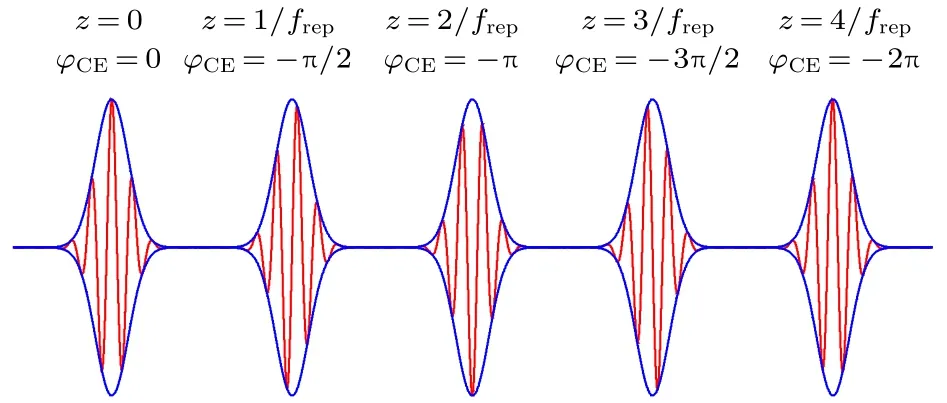
图4 在同一脉冲包络下不同CEP值所对应的实际电场(CEP对少周期脉冲电场实际形状影响显著)Fig.4.Actual electric field of a few cycle laser pulse under different CEP values,which affect the electric field signific−antly.
CEP会在激光的传播过程中产生抖动,抖动源来自激光产生、放大和传播过程中的量子噪声和空气流动、温度变化、机械振动等带来的环境噪声.若要稳定脉冲的CEP值则需要对高频与低频抖动分别进行锁定.对于高频抖动,较为常见是利用脉冲通过周期极化晶体后产生的拍频信号(即载波包络相移CEO)与锁相环电路中的参考信号鉴相,锁定到脉冲重复频率的某一分频处,使得CEP呈现周期性锁定[23],该过程多用于激光振荡器.而低频抖动的锁定主要用于激光放大器.对于脉冲能量在mJ量级,重复频率kHz量级的放大激光而言,CEP的值可以通过阈上电离法[24]与光学干涉[25]的办法获得并反馈控制.阈上电离法是通过周期量级脉冲与气体分子相互作用,并对电离出的电子飞行路径进行分析,能够获取光脉冲内电场分布并进而推导出CEP.但由于该方案所需系统庞大,造价昂贵,因此并未得到广泛应用.而光学干涉法是利用单个脉冲内部不同频率成分之间产生光谱干涉条纹以提取CEP的相对值变化,该方法的实验装置要简易许多.目前最常见的是倍频光谱(f−2f)干涉法,将光谱覆盖一个倍频程的超连续光的长波部分倍频,与基频光的相应频率(短波)部分拍频得到光谱干涉信号,本研究正是基于这种方法.
对高斯脉冲电场E(t),设脉宽以简 化计算,并对其进行傅里叶变换得

考虑由激光电场分量E(ω)引入的电偶极矩,选取一阶和二阶项[26]

当短波部分与长波部分的二次谐波光谱干涉,满足相位匹配时,由麦克斯韦方程可得二次谐波相位滞后基频波 π/2 ,也就是ESH(ω)∝iP(2)(ω) ,基频光通过固定的色散材料时的长波短波之间会产生一定的延迟,设为τd,因此EF(ω)∝e-iωτdP(1)(ω) ,可得干涉条纹的光谱强度

其中包含了强度叠加项和干涉项,相位与ωτd+ϕCE有关,对给定的波长,且固定的光路下,可认为延迟时间τd不变,影响干涉条纹位置的变量是ϕCE.对I(ω)进行傅里叶变换可知
傅里叶变换后,当k=τd/(2π) 时该项所对应的虚部值即包含所研究光场的CEP信息.
线偏振高斯脉冲在介质中传播时,其电场可表示为[27]

式中ϕCE为初始相位;Δφ=ω0(1/vg-1/vp)z,其中ω0是载波中心频率,群速度vg是脉冲包络的传播速度,相速度vp是载波传播速度,z是脉冲传播距离;∆ϕ直接影响载波电场的相位值.且在脉冲在材料中传播时满足:

我们的锁定系统先是通过自主搭建的f−2f干涉仪,结构见图5.将25 fs,中心波长780 nm的红外光经光谱展宽后,通过尖劈分少部分能量聚焦在BBO上产生倍频光,并利用光谱仪采集倍频部分与基频光中相同频率成分形成的干涉信号以获取CEP信息.f−2f干涉仪中加入了选偏元件,通过转动半波片和偏振棱镜可以保证通过BBO后偏振方向旋转了 π/2 的倍频光与基频光在同一方向上的分量相近,从而得到调制最深的干涉条纹,有利于提高数据处理精度.随后将光谱仪得到的干涉数据送入labview程序,截取有效的深调制干涉范围,对强度−频率数据进行快速傅里叶变换.某时刻下原始数据无论以时间、频率、或者位置为横坐标,都看成上文提到的f(x,ϕx,t),也就是在不同时间t下的测得横坐标用x表示的光谱图,方便从数学上理解.我们的目的是使得原始数据稳定,也就是f(x,ϕx,t)不随时间t改变.现实情况是每个t都会产生一张光谱图,不同x处相位不同.程序在每个时刻下在有效的x范围内处理光谱强度,提取出含有CEP信息的相位项,和作为参考值的初始相位对比.如果能保持这个相位不变,那么随着t的改变,有效的x范围内光谱相位就基本保持不变.具体算法是对时刻t'的干涉条纹谱进行快速傅里叶变换,f(x,ϕx)的变换表示为F(ω,φω),取一阶项,选择一个有效参考点减少随机性,例如强度最高处对应的点,也就是频域中频率成分最多的点,横坐标为ω1,取其关于参考相位φω1(t0)的相位差Δϕω1(t′),经过PID给出电压信号反馈到控制色散元件的PZT平移台,来抑制 Δϕω1(t′) ,将由于机械元件振动和环境涨落对CEP造成的影响通过改变棱镜对的插入量弥补回来.对于我们的锁定环路来说,光谱干涉信号越强,信噪比也会越强,有利于增强CEP锁定的稳定性.

图5 f−2f 装置光路图(采用共线设计以避免延时变化)Fig.5.f−2f setup diagram,where collinear design is applied to avoid delay variation.
图6为锁定结果,光谱仪积分时间3 ms,在20 min的锁定时间内CEP的抖动仅为227 mrad,显示反馈系统在CEP的慢环锁定上有良好的效果.

图6 f−2f锁定CEP20分钟的效果(均方差为227 mrad)Fig.6.CEP offset over 20 minutes when CEP is locked us−ing f−2f.
4 结 论
本文分析了快速傅里叶变换在运算效率上的优势,基于这种高速运算,补偿机械振动和环境涨落引入的噪声得以实现.利用532 nm连续激光锁定抽运探测光路中马赫−曾德尔干涉仪两臂相对光程,通过对干涉条纹数据进行快速傅里叶变换,计算出频域一阶项的平均相位,由labview程序反馈到控制相对臂长的PZT上实现了相对相移的RMS为14.6 mrad的锁定,对应时间4.1 as.还将快速傅里叶变换应用于f−2f系统,通过光谱干涉信号傅里叶变换的一阶项峰值处的相位偏移量,得出需要的反馈电压,由labview程序控制棱镜对插入量从而补偿CEP慢漂,在光谱仪3 ms积分时间下得到了RMS为227 mrad的锁定结果.以上结果表明快速傅里叶变换在反馈控制方面的应用有着响应速度快,运算精度高等优势.最近,本研究组基于f−2f自参考装置在相干合成光场中同时实现了CEP与相对延迟(relative timing)的8 h长时间锁定,同样基于快速傅里叶变换算法[28].我们可以提供阿秒量级的相对时间稳定性,这在当今使用不同手段观测亚原子尺度电子运动,甚至通过光场调控驱动电子成为热门的大环境下显得尤为重要,不仅仅是物理学,在信息存取、化学、生物学、高分子材料方面都有广泛的应用.
猜你喜欢
少儿科技(2021年12期)2021-01-20
小福尔摩斯(2019年2期)2019-09-10
数学物理学报(2019年2期)2019-05-10
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
理科考试研究·初中(2017年5期)2018-03-07
中学生数理化·八年级物理人教版(2017年10期)2018-01-22
浙江大学学报(工学版)(2016年11期)2016-06-05
舰船科学技术(2016年1期)2016-02-27
娃娃画报(2014年9期)2014-10-15
