
果园远程机器人数字视频光纤传输系统—基于DWDM
2019-12-21 02:49冷伟
农机化研究 2019年4期
冷 伟
(四川邮电职业技术学院 实验实训中心,成都 610067)
0 引言
随着世界人口的急剧增加,农业生产所承受的压力越来越大,对大规模、高效率的生产模式的需求也日益明显。同时,科技的发展和各种理论、技术的突破也使得这类生产模式成为可能。农业机器人凭借其无疲劳、高效率的优势起到相当重要的作用。20世纪末开始,美国、日本、法国、印度等许多国家开始了对自动采摘机器人的研究,并取得了一定成果,但应用情况并不乐观。对于自动化作业采摘机器人的设计,远程监控系统是设计的关键。此系统可以协助机器人进行自我故障诊断,可以对作业质量进行实施监测,在必要的时候可以对采摘机器人进行远程控制。因此,高效的监控系统对于采摘机器人的设计具有重要的意义,本研究拟将基于DWDM的光纤系统引入到采摘机器人监控系统中,以期得到高效的采摘机器人远程控制系统。
1 DWDM光纤传输系统原理及其在采摘机器人远程控制系统中的应用
DWDM是一种新的光纤数据传输技术。该技术采用两种不同的方式在光纤内传送数据:一是按照比特位并行传输;二是利用字符串串行传输数据。在发送端和接收端,该技术分别采用了光复用器和光解复用器,可以将光载波进行合并和分离,从而将多路信号在一根光纤中传输,大大提高了光纤的利用率,可在比ITU-T建议标准小的情况下,采用50GHz和33.3GHz甚至更小的信道间隔,充分利用光线带宽进行数据传输。
DWDM系统主要由4部分组成,包括主要的光复用器和光解复用器,再就是必备的光源、光放大器和光波长转换器。
光复用器与光解复用器是DWDM系统中非常重要的器件。光复用器可以将不同的光波长的数据信号进行合成,光解复用器可以将不同波长的信号进行分离。光复用器和光解复用器可以合并为一个器件,一般要求该器件具有隔离度较大、带内损耗较为平坦及插入损耗小等优点。目前,在DWDM系统中,该器件的类型主要有相控阵分波器及光栅耦合器等。
光放大器可以对光信号进行放大,补偿光信号在光纤传输过程中的损耗,从而提高光纤信号的传输距离。光信号放大器最常用的是掺饵光纤放大器,放大器利用泵浦光输入光纤中的方法使得输入光信号与辐射光的相位和波长自发保持一致,从而使光信号的功率得到加强,实现了对光信号的放大。
采用DWDM系统可以大大提高光纤的传输距离。为了克服长距离传输过程中光的非线性效应和色散受限距离不够长的问题,需要采用更加先进的光源。该光源必须具有稳定的波长和一定的色度色散容限。
DWDM为了实现光纤的复用,在一个系统中允许接入不同厂商的SDH系统。采用光波长转换器将复用端的信号转换为制定波长的标注光波信号,从而使终端光信号波长符合规范系统。
DWDM系统具有通信传输速度和通信容量较高、传输距离长、设备简单、智能化程度高等特点,使用在远程采摘机器人监控系统中,将发挥重要的作用。因此,本次采摘机器人远程控制系统的设计采用了该系统进行高清作业监控视频信号的传输,通过对作业情况的监控,对采摘机器人发出控制指令。
图1为基于DWDM的采摘机器人远程系统基本框架。其中,摄像头采集的机器人作业信息由DWD光纤传输系统传送到电脑和手机控制终端,然后控制中心对采摘机器人发出远程控制指令,并由单片机将信号转换为控制指令对机器人进行控制,包括舵机、照明电路和电机驱动模块等,从而实现采摘机器人的远程控制。
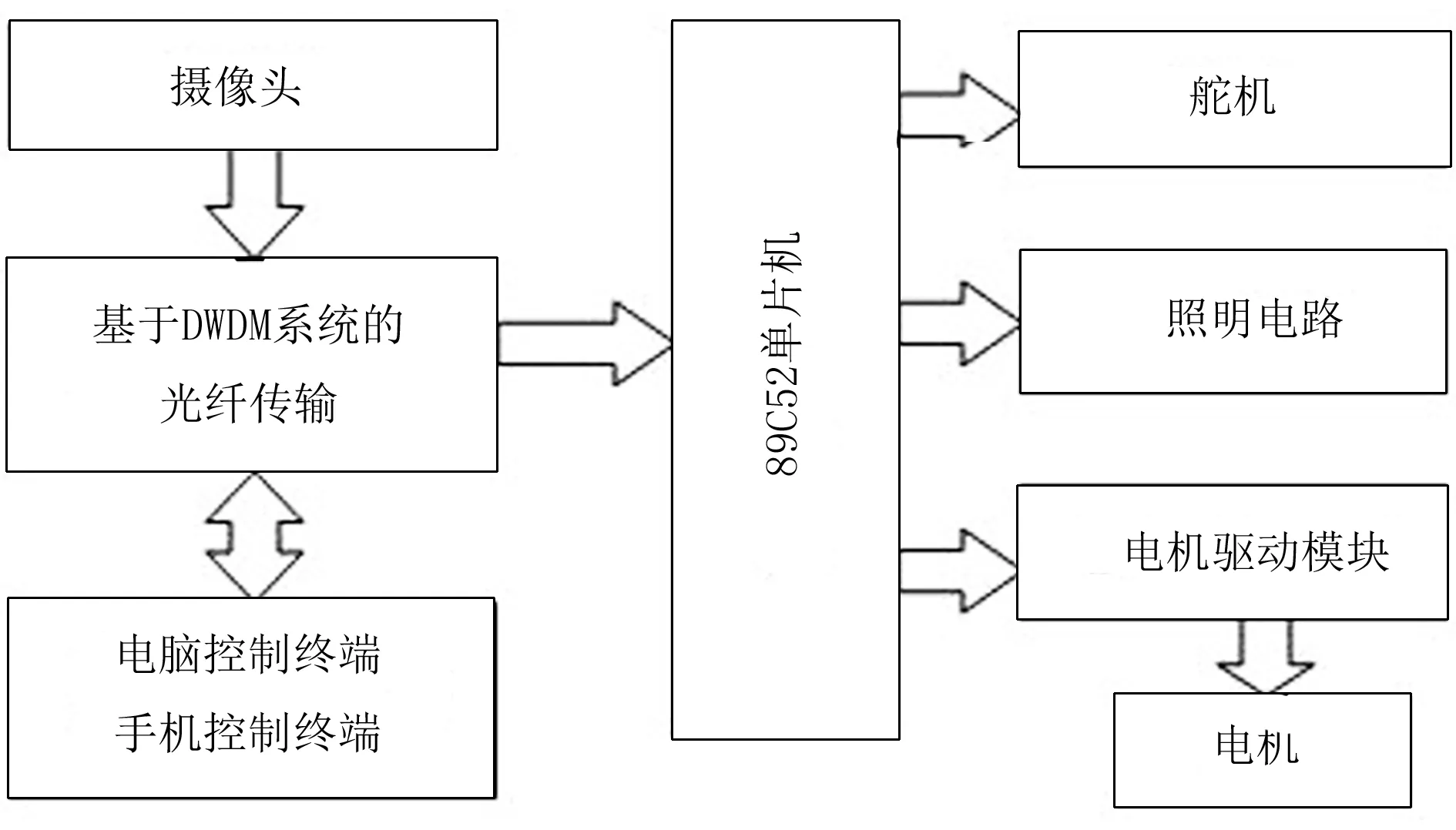
图1 基于DWDM的采摘机器人远程系统基本框架Fig.1 The basic frame of remote system of picking robot based on DWDM
2 采摘机器人远程控制系统测试
在采摘机器人自动化作业过程中,为了对采摘机器人的故障状态进行诊断,需要实时对采摘机器人的作业情况进行监控。本文采用基于DWDM的光纤传输系统架构监控网络,将采集得到的视频信号通过光纤网路发送到电脑等终端,并在其上位机软件中显示摄像头采集到的视频信号,发出控制指令。整个工作的整体流程图如图2所示。

图2 采摘机器人远程控制总体工作流程图Fig.2 The general working flow chart of remote control for picking robot
采摘机器人的远程控制终端通过DWDM光纤传输网络和路由器进行连接,远程控制终端通过上位机软件将控制指令发送给路由器,路由器接收到控制指令后通过内部的串口发送软件,将接收到的命令和数据发送给单片机;单片机接收到指令后控制执行终端执行动作,包括小车的运动、舵机的运动和电路照明等。其中,单片机最小系统主要包括电源、时钟和复位电路,如图3所示。

图3 单片机最小系统组成方框图Fig.3 The block diagram of the minimum system composition of a single chip microcomputer
单片机最小系统的电源电路模块主要是为单片机和其他模块提供电源电压。本设计中采用的电压主要是标准的+5V电压,时钟电路主要为单片机的控制指令提供基本的时序脉冲序列。采摘机器人远程控制系统另一个重要的部件是舵机,在设计时将两个舵机合成到一个控制台上,一个负责垂直方向的旋转,一个负责水平方向的旋转。用于采摘机器人作业状态视频采集的摄像头也安装在控制台上,通过单片机发出PWM信号控制舵机旋转,可以实现摄像头在转动。舵机的示意图如图4所示。

图4 舵机示意图Fig.4 The rudder schematic diagram
舵机实际是一种伺服电机,通过发送不同的脉宽调制信号,控制不同的旋转角度,脉宽可以从0.5~2.5ms之间变化,相对应可以调整的角度为0°~180°,呈线性变化。整个远程控制过程的软件执行流程如图5所示。
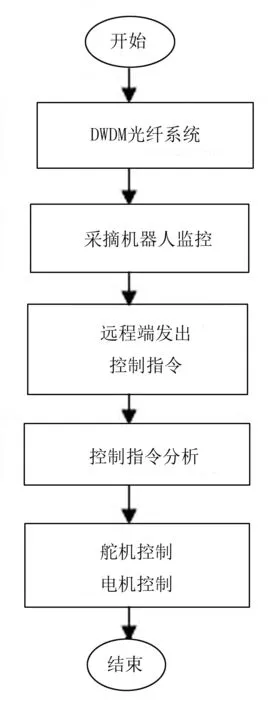
图5 采摘机器人远程控制软件流程Fig.5 The remote control software process for picking robot
摄像机将采集到的视频信号发送给远程控制端,远程控制端根据采摘机器人的作业状态发出控制指令,指令在单片机内进分析后发送给舵机和电机,执行摄像头的旋转和采摘机器人执行末端的相关动作,从而完成远程控制。
3 采摘机器人远程控制系统性能测试
为了测试DWDM光纤传输系统在采摘机器人远程控制系统中发挥的作用,采用DWDM光纤传输系统架构了远程监控网络,并对监控效果和机器人的性能进行了测试,如图6所示。

图6 基于DWDM光纤系统的远程控制采摘机器人Fig.6 The remote control picking robot based on DWDM optical fiber system
将高清摄像头安装在采摘机器人的顶部,在舵机的作用下可以进行旋转,将单片机控制系统嵌入到机器人内部,并进行了封装。首先,对白天作业背景下的监控图像进行了采集,得到了如图7所示的结果。

图7 白天作业背景下图像采集Fig.7 The image acquisition under daytime operation background
图7中,在白天作业背景下,采摘机器人可以从作业地点将高清的图像反馈到远程控制端,并可对果实进行特征提取,为采摘机器人的果实目标定位奠定了基础。
为了验证采摘机器人监控系统对环境的适应能力,在夜间作业背景下对作业场景的图像进行了采集,如图8所示。在夜间作业背景下,采摘机器人也可以传回高清的作业图像,并可对果实目标图像进行特征提取,从而验证了监控系统的可靠性。
为了验证光纤传输系统性能的可靠性,对传输系统的时延特性和丢包率进行了测试,得到如表1所示的结果。由测试结果可以看出:传输系统具有较低的时延特性和丢包率,可满足系统设计的需求。

图8 夜间作业背景下图像采集Fig.8 The image acquisition under night operation background

表1 光纤传输性能测试Table 1 The performance test of fiber transmission
最后,对采摘机器人的采摘性能进行了测试,得到了如表2所示的测试结果。由测试结果可以看出:采摘机器人对于果实目标的识别效率较高,且采摘的准确率也较高,可以满足采摘机器人自动化作业的设计需求。
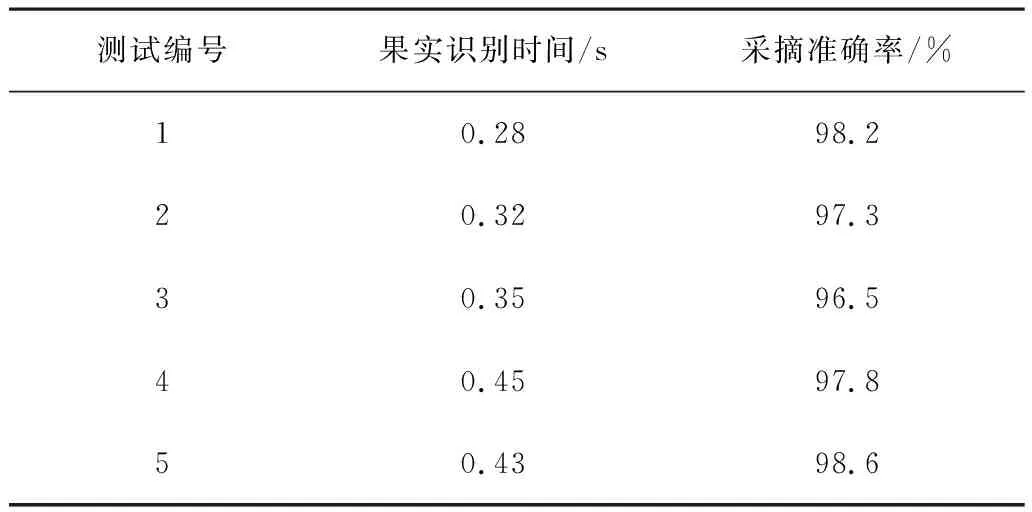
表2 采摘性能测试Table 2 The picking performance test
4 结论
为了提高采摘机器人远程控制系统的性能,将基于DWDM的光纤传输网络引入到了监控系统的设计中,从而有效地提高了监控网络的数据传输性能。为了验证系统的环境适应能力,对白天和夜间作业条件下的系统性能分别进行了测试,结果表明:在白天和夜间作业条件下,监控系统都可以传回高清的作业场景图像,从而验证了系统的可靠性。为了验证系统对采摘机器人远程控制的作用,对采摘机器人的作业性能进行了测试,结果表明:采摘机器人具有较高的果实目标识别效率,其采摘准确率也较高,从而验证了方案的可行性。
猜你喜欢
现代妇女(2022年5期)2022-05-25
英语文摘(2021年11期)2021-12-31
家庭影院技术(2020年1期)2020-06-24
家庭影院技术(2019年4期)2019-04-17
家庭影院技术(2018年9期)2018-11-02
学生天地(2018年19期)2018-09-07
电子制作(2018年1期)2018-04-04
电子制作(2017年13期)2017-12-15
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
