车用电驱动压气机系统匹配与设计
2020-01-11 02:19段雪莹吴新涛
车辆与动力技术 2019年4期
段雪莹, 张 虹, 陈 意, 吴新涛
(1.北京理工大学 机械与车辆学院,北京 100081;2.柴油机增压技术重点实验室,天津 300400)
电驱动压气机被广泛应用于混合动力汽车,燃料电池车等新型能源车上.在混合动力车辆上,尤其在48 V轻混等车型上,电驱动压气机被用于替代传统的废气涡轮增压或与传统废气涡轮增压组成多级增压系统.它可以在发动机低转速时,提供发动机所需的空气量,以解决传统增压器的涡轮迟滞问题,并辅助传统涡轮增压在高速工况实现更高的压比输入,进一步提升发动机动力与燃油效率[1].同时,它还可以在高速工况时,将多余的废气能量回收,通过发电机发电转化为电能储存起来.在燃料电池车辆上,它可被应用于空气进气系统的空气压缩机.因为电机具有很强的加减速能力,它可以随时根据控制策略改变其瞬态转速以达到燃料电池阴极化学反应所需的一定压比和流量的空气,这对于燃料电池运行的稳定性和实现功率最大利用起到至关重要的作用.目前,许多研究机构或企业都致力于研发高性能的电驱动压气机.
霍尼韦尔(Honeywell)公司是最早开展电驱动压气机技术研究的公司之一,其对电驱动压气机进行了模拟仿真并先后开发出了3代电驱动压气机,研究结果表明了电驱动压气机不仅改善了发动机的燃油经济性,而且提高了发动机低速时的响应特性[2-3].博格华纳一直致力于研究二级增压系统的电驱动压气机.目前已开发出了多代实验产品.日本长冈科技大学和三菱重工已分别研制出了最高转速为220 000 r/min的电机与废气涡轮增压器一体化布置的增压器[4].采用永磁同步电机中置方式,在电机转子上设计碳纤维材料的加强结构,用来保证转子的强度.通过配机实验表明,发动机的稳态转矩和瞬态响应特性都有不用程度的提高.采用功率为2 kW的永磁同步电机,发动机转速在1 000 r/min和1200 r/min时,与采用可变截面涡轮增压器相比发动机扭矩增加了17%[5].
文中针对某型车用增压系统的要求,进行车用电驱动压气机系统的匹配设计,搭建试验测试台架,建立能够正确表示实际系统运行的仿真模型,为实现电驱动压气机系统的控制和实际应用打下基础.
首先根据一款电驱动离心压气机进行电驱动压气机匹配设计,对高速电机等部件进行选型.根据选型结果对于辅助系统即冷却系统和电气连接布局进行设计,建立各部件之间的通讯,完成了试验台架的搭建.接着完成针对于试验台架仿真模型搭建,分别对于空压机、高速电机、电机控制器和管道阀门进行建模仿真.利用试验数据去检验校正模型,得到准确的系统仿真模型和各部件之间的参数匹配情况.
1 电驱动压气机的匹配设计
1.1 电驱动压气机匹配计算
首先选定了一款电驱动离心压气机,压气机组成如图1,参数如表1所示.
图中A部分表示高速电机;B部分表示高速联轴器布置;C部分表示皮带轮传动;D部分表示牵引传动连接;E部分表示压气机.
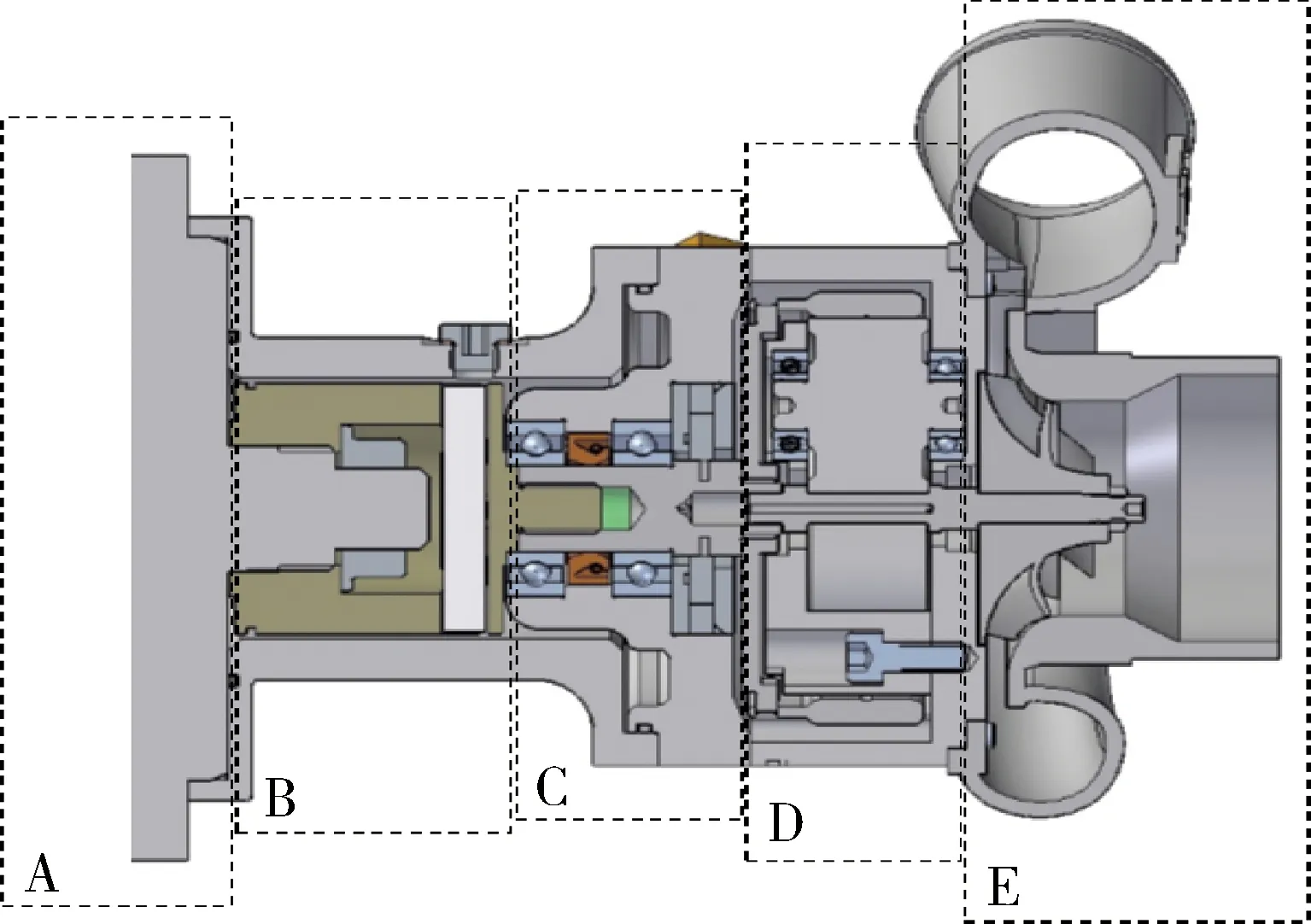
图1 电驱动压气机组成

表1 空压机参数表
为了确保电驱动压气机系统的各项性能参数都符合预期的要求,首先要做的是计算匹配正确的高速电机参数.根据电力拖动原理,电动机运行时的轴受力必须遵守以下的动力学方程式.
(1)
式中:T为电磁转矩;TL为负载转矩;J为电动机轴上的总转动惯量;Ω为电动机角速度.
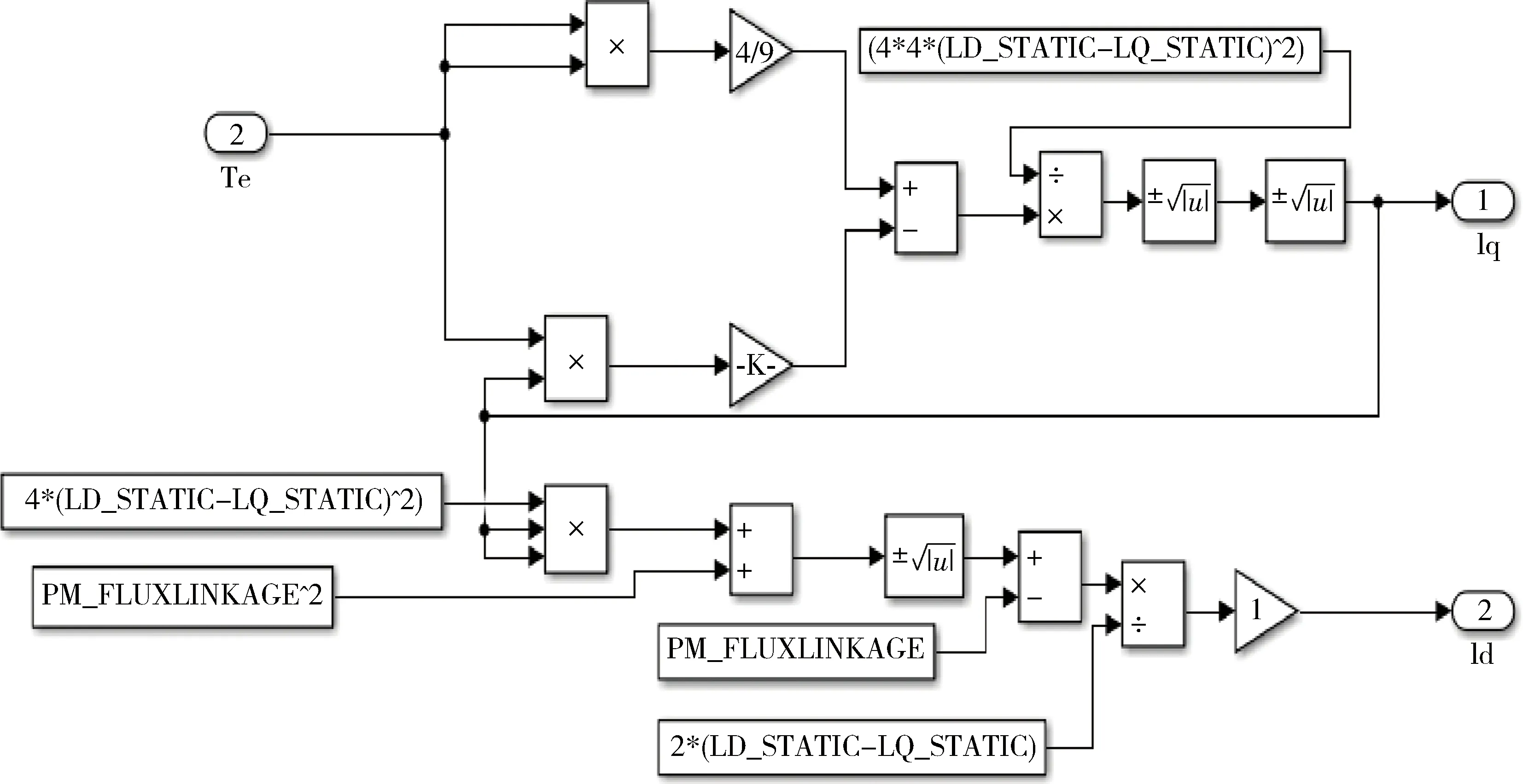
当T=TL时,电力拖动系统处于稳态均速;T>TL时,电力拖动系统处于暂态加速;T (2) 式中:γ为绝热指数. 空压机转矩,功率和转速的关系可写成: (3) 根据此,在压气机一定转速下,转矩最大点即为此刻的最大转矩点.在空压机特性曲线的等速度线上取得此速度下的最大转矩点,求出不同转速下的所有最大转矩点,绘制转速-最大转矩对应曲线. 根据计算可知,在设计点(110 000 r/min)工作时,压气机的最大功率为7.9 kW,最大转矩为0.68 N·m.文中采用的传动系统为Rotrex系列,传动比为12.67,计算得电机所需提供的转速大概为9 000 r/min,转矩需提供8.54 N·m.根据这些设计参数,选择适合的电机并匹配电机控制器.电机和电机控制器参数如表2、3所示. 表2 电机参数表 表3 电机控制器参数表 为衡量电驱动压气机系统的性能和匹配结果,搭建电驱动压气机测试系统.测试系统主要分为冷却系统、电机控制系统、阀门系统、进出口管道系统、数据采集系统以及上位机控制系统.其中,电机控制系统通过CAN协议建立通讯连接,PLC数据采集系统通过ModBus协议建立连接.上位机通过Labview软件,发送指令控制电机工作,带动压气机运行并实时显示采集到的数据信息并存储.测试台架能够正常控制冷却系统启停、阀门开度大小调节以及传感器数据实时采集,并有故障诊断与报警功能,可分别对电驱动压气机系统的电动性能和气动性能参数进行采集和数据处理,得到完整的电动压气机测试参数和电机测试参数,以此来评价电驱动压气机系统的性能. 通过分析比较建模方法,选取神经网络算法建模.其优点在于能较好应对各种干扰因素(噪声、形变和非线性等);且能够高效启发式搜索和并行计算,所以适用范围很广,普遍应用于各种函数优化和组合生产优化中. 如图2所示为基本神经元模型. 图2 基本神经元模型 图中:x1,x2,…,xp为输入信号,搭载输入信息;wk1,wk2,...,wkp为神经元k的权值;uk为输入信号加权和线性组合结果;θk为阈值;φ(·)为激活函数,线性组合结果与阈值的非线性对应,将输出规定在一个区间;yk是神经元k的输出[6]. 在拟合过程中容易出现“过拟合”情况,为了防止出现这样的情况,文中在数据输入前根据一定的规则先将其分成3类,分别为变量、训练值和测试值.这些数据构成了压气机特性曲线,因为每条曲线之间的相似性表明变量数据之间存在的某种函数规律.在防止过拟合的操作中,为了让优化求解的结果更加精确,也考虑到这种函数规律并使得其尽可能地体现.使用前先对空压机的试验数据和参考厂商给出的空压机特性曲线图进行重新分类处理,通常使用divideint分类函数来分类,且3种数据所占比例分别为0.2∶0.6∶0.2[7].误差在迭代15次之后达到了最小值,可以较好地表示期望.最终将神经网络拟合的特性曲线和试验数据做出对比如图3. 图3 拟合结果与试验数据对比图 由图可见:在空压机工作覆盖的范围内遗传算法神经网络可以起到较好的模拟作用. 为了将高速电机转速控制的速度调控范围扩大,这里将根据电机基速将其控制分为两个部分,分别为MTPA(最大转矩电流比)控制(基速以下)和弱磁控制(基速以上),来满足对于不同工况、采用不同转速驱动空压机的响应需求[8]. MTPA模块的输入为参考转矩,图4为MTPA模块的Simulink框图. 图4 MTPA模块Simulink模型 梯度下降弱磁控制仿真模块如图5所示. 图5 梯度下降法弱磁控制Simulink模型 对模型经过修正调整,可以得出以下的仿真结果图.图6(a)展示的是对应于空压机设计点的电机转矩变化图像;图6(b)展示了电机转速跟踪图像. 图6 电机在空压机设计点运行时仿真结果 电驱动压气机系统部件的连接很大程度依靠管道连接,在管道中流量和压比的变化波动影响到整个系统的稳定,最终影响燃料电池的内部运行.进气歧管的体积可表示为空压机和燃料电池堆栈之间的总体积.歧管内压力变化与空压机特性直接相关.根据质量守恒定律,在歧管中积累的空气流量的动态变化和歧管空气压力可以用以下公式表示. (3) (4) 式中:qout为歧管出口的空气流量;Tin和Tout为压气机出口气体的温度和歧管空气温度;γ为空气的热比例系数;Ra为空气气体常数;V为流体的体积.在空气中γ=1.4,Ra=8.3. 假定压气机的出口温度和歧管内气体的温度相同,则上式可以表示为 (5) 临界压比ξ为 (6) 使用喷嘴方程来计算qout,可根据临界压比,即马赫数ξ将其划分为两个区域. 对于Patm/P>ξ,有: (7) 对于Patm/P<ξ,有: (8) 式中:θ为阀门的开启角度;Cd为喷管的流量系数;S(θ)为对应角度区域面积;临界压力比为ξ=0.528. 参考试验值将管道阀门对于流量和压比的影响方程拟合,可写成如下的结果. qout=φ(θ,p). (9) 前几节中已经对于电驱动压气机系统的主要部件进行了建模,下一步就是将主要部件按照它们之间的关系连接,首先建立压气机系统数学模型: (10) 式中:输入量为u=[w*,θ]T;状态量为x=[p,w]T;输出量为y=[q,p]T. 对于主要部件对应的方程分别建立系统方框图如图7所示. 图7 主要部件系统方框图 根据上述框图进行子模块的连接最终得到整个系统的Simulink模型如图8所示. 图8 燃料电池空气供给系统Simulink模型 选取几个典型的工作点对模型进行验证,验证数据来源于试验台架的试验数据.选取的工作点:空压机转速分别为70 000 r/min、90 000 r/min、110 000 r/min,对应的阀门开度为60°、65°、65°.除了对于定工况点的对比仿真之外,将转速和阀门开度设置为阶跃信号变化来模拟工作过程中的动态变化,将动态变化制定为:先稳定工作在70 000 r/min(60°),一段时间后阶跃提高到90 000 r/min(65°),再提高到110 000 r/min(65°),最后恢复到初始值.观察仿真模型的动态响应是否能够与实际台架试验结果匹配.将仿真数据和试验数据做对比分别得到不同转速时,流量和压比对比图,如图9-11所示.图12为动态变化时流量压比对比图. 由图可以看出,在稳态工况中,从70 000 r/min-110 000 r/min的压气机主要工作区间仿真数据可以较好地表示试验数据.最大差异:对于流量而言两者误差为7%,压比最大误差为2%;高转速下达到稳定状态略微比低转速下达到稳定状态的时间长一点.虽然在起步上升阶段有一些误差,但是基本与试验曲线相吻合,故此仿真模型可近似表示实际模型.在实际情况中,有很多引起误差的因素存在,比如传感器在工作中产生的细小误差将会带来计算结果的很大的偏差.在试验中,长时间让系统运行在高速工况之后停止运行,或者回到低速运行工况,排气管道没有能够很好地短时间内将高压气体完全排出,造成压力值迟迟降低不下来.然而,在仿真中,这些实验器材,甚至是实验环境所带来的实验误差是完全可以规避的,这就导致在系统开始运行时,仿真的响应总是稍微比实际的快一些. 图11 110 000 r/min时流量压比对比图 图12 动态变化时流量压比对比图 如图12动态工况所示,当转速迅速下降,仿真模型的流量和压比能够迅速地下降,而实际情况中则要慢一些.经过对比仿真和试验,这些细小的误差所带来的影响较小,仿真模型也可以很好地做出跟随反应.所以,经过本章的验证,可以采用本章搭建的仿真模型进行后续实现电驱动压气机系统的控制和实际应用. 通过电驱动压气机系统匹配设计和搭建测试平台,对系统主要部件(空压机、电机和电机控制器)工作过程进行了分析,完成对应实际测试台架的部件仿真模型的搭建,并根据整个系统的运行过程将各个部件仿真模型进行连接.为验证仿真模型的准确性,在实际台架上进行了压气机工作范围上3个工作点(即70 000 r/min、90 000 r/min、110 000 r/min)最高效率点的试验.对比仿真分析结果,流量最大误差为7%,压比最大误差为2%.通过转速和阀门开度调节,在测试台架上实时记录电驱动压气机压比和流量的动态变化情况,验证电驱动压气机系统的仿真模型,以及系统各个部件之间的参数匹配关系,为后续的控制算法提供了指导.
1.2 电驱动压气机测试系统
2 电驱动压气机系统建模仿真
2.1 压气机建模


2.2 电机及控制器建模


2.3 阀门管道建模

2.4 电驱动压气机系统仿真模型建立与验证




3 结 论
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
燃气涡轮试验与研究(2021年4期)2022-01-18
建材发展导向(2021年11期)2021-07-28
航空发动机(2021年1期)2021-05-22
航空发动机(2020年3期)2020-07-24
装备制造技术(2019年12期)2019-12-25
电子制作(2017年17期)2017-12-18
通信电源技术(2016年1期)2016-04-16
中国塑料(2014年12期)2014-10-17