
核反应堆功率的H∞-LQR负荷跟踪控制
2020-02-25 08:16王俊玲于成波栾秀春杨志达
哈尔滨商业大学学报(自然科学版) 2020年1期
王俊玲,于成波,周 杰,栾秀春,杨志达
(1. 哈尔滨工程大学 核安全与仿真技术国防重点学科实验室,哈尔滨150001; 2.中国核动力研究设计院,成都610005)
随着核电机组在整个电网中所占比例的增加,要求核电机组必须能够根据电网的负荷要求进行调整,也就是从基本负荷模式向负荷跟踪方式的转变.核反应堆是一个高度复杂的非线性系统, 特别是当出现大范围的功率变动时,负荷跟踪控制更加困难[1].目前核电站中广泛应用的是PID控制方法,但是随着负荷跟踪需求的提出,传统的PID控制遇到了一定的困难[2].为了提高核电机组的负荷跟踪能力,一些先进的控制方法应用到核反应堆控制领域,如自适应控制[3-4]、模糊控制[5-6]、人工神经网络控制[7]、滑模控制[8]、模型预测[9]、二次最优控制[10-11]、鲁棒控制[12]等,在所设定的条件下达到了不错的效果,但考虑核反应堆功率控制在整个核电机组的重要地位以及目前所设计的功率控制器在实用性和经济性上还存在不足,因此进一步研究有效的负荷跟踪控制方法是非常有必要的.
鉴于T-S模糊模型可以实现对非线性系统的无限逼近[13-14],本文采用5阶T-S模糊模型描述反应堆功率非线性系统,结合H∞性能指标和LQR控制理论,设计H∞-LQR模糊跟踪控制器,通过调整权值矩阵,实现不消耗过多控制能量的情况下,实现反应堆功率的跟踪控制.最后应用核反应堆功率系统的10阶非线性模型进行仿真,验证所设计的控制器满足负荷跟踪性能要求.
1 核反应堆功率系统建模
核反应堆功率系统模型由一组非线性方程组成,它由点堆中子动力学方程、燃料温度反馈和冷却剂温度反馈以及反应性方程构成集总参数模型.归一化的10阶模型如下[11]:
(1)
其中:nr为相对中子密度;
cri为第i组相对缓发中子先驱核浓度;
λ为第i组缓发中子先驱核衰变常数;
βi为缓发中子裂变份额;
Tf,Tf0为反应堆燃料的平均温度,初始稳态时燃料元件平均温度,℃;
To,To0为反应堆冷却剂出口温度,初始稳态时冷却剂出口温度,℃;
Te,Te0为反应堆冷却剂进口温度,初始稳态时冷却剂进口温度,℃;
εf为反应堆的额定功率释放到燃料元件中的份额;
μf,μc为燃料元件的总热容,冷却剂的总热容,MW·s/ ℃;
Ω为燃料元件和冷却剂间的传热系数,MW/ ℃;
M为冷却剂质量流量热容量,MW/ ℃;
af,αc为燃料的反应性温度系数,冷却剂的反应性温度系数,Δk/k·℃-1;
ρr为控制棒移动引入的反应性变化量;
zr为控制棒移动速率;
Gr为控制棒微分价值,Δk/k;
各参数的值见表1,用等效单组缓发中子方程代替六组缓发中子方程,在平衡点功率nr0处进行线性化,得到5阶状态空间模型如下:
(2)
其中:状态变量x(t)=[δnr,δcr,δTf,δT0,δρr]T,控制输入u(t)=zr,输出y(t)=δnr, 系统矩阵为:
B=[0 0 0 0Gr]T,C=[1 0 0 0 0]

表1 压水堆在燃料寿期中的相关参数值

(3)
其中:状态向量ϑ(t)=[x(t),δq(t)]T,系统矩阵
由表1的参数值可以发现模型(1)是随着nr0变化的非线性系统,因此可以跟据nr0变化建立T-S模型来实现对非线性系统逼近.选取nr0为0.2、0.4、0.6、0.8和1(即选取额定功率的20%、40%、60%、80%和100%)建立隶属度函数,如图1所示.

图1 相对输出功率nr0的模糊隶属度函数
采用单点模糊化、乘积推理、加权平均反模糊化的方法,式(3)可以描述为全局的模糊模型:
(4)

本文基于低阶T-S模糊模型(4)设计状态反馈模糊控制器.
2 核反应堆H∞-LQR跟踪控制器的设计
首先给出控制器设计中需要的引理.
引理1[15]对于任意矩阵x、y,存在一个常数ε>0和时变矩阵F(t)满足FT(t)F(t)≤I,则得:
xTF(t)y+xFT(t)yT≤ε-1xTx+εyTy
(5)
为了保证所设计的控制器满足H∞性能指标并且可以有效地控制输入能量,定义如下的性能指标函数:

(6)

设核反应堆系统初始状态为零状态,要使得J<0,则有:
(7)
根据权重矩阵Q(nr0)≥0和R>0,则下面不等式成立:
(8)

(9)
一定存在两个正数γ1和γ2,保证不等式
(10)
(11)
设定模糊状态反馈控制规则如下:
Ri:Ifnr0isMi
Thenu(t)=Kiϑ(t)i=1,2,…,5
(12)
则状态反馈控制律可以表示为:
(13)
选取Lyapunov函数V(t)=ϑT(t)Pϑ(t),然后将V(t)对时间求导得到:


(14)
为了得到H∞-LQR状态反馈控制器,需满足V(t)+J<0,则根据式(12)、(14)得:
(15)
(16)
其中:
定理1 给定正数ε、权值矩阵Qi和R,如果存在对称正定矩阵X和矩阵Wi,i=1,2…,5,以及一个正数γ,满足如下线性矩阵不等式组:
(1≤i≤5)
(17)
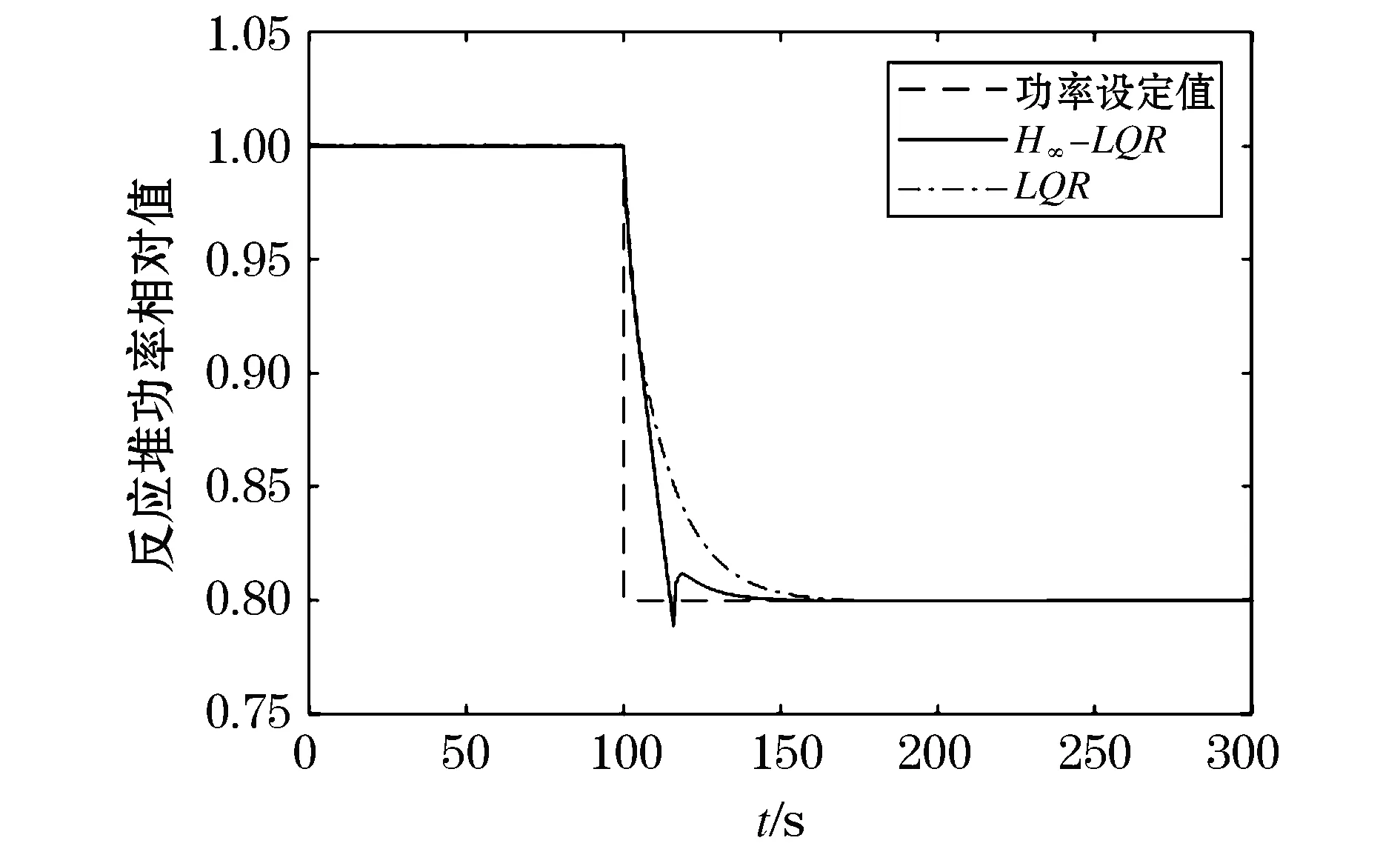
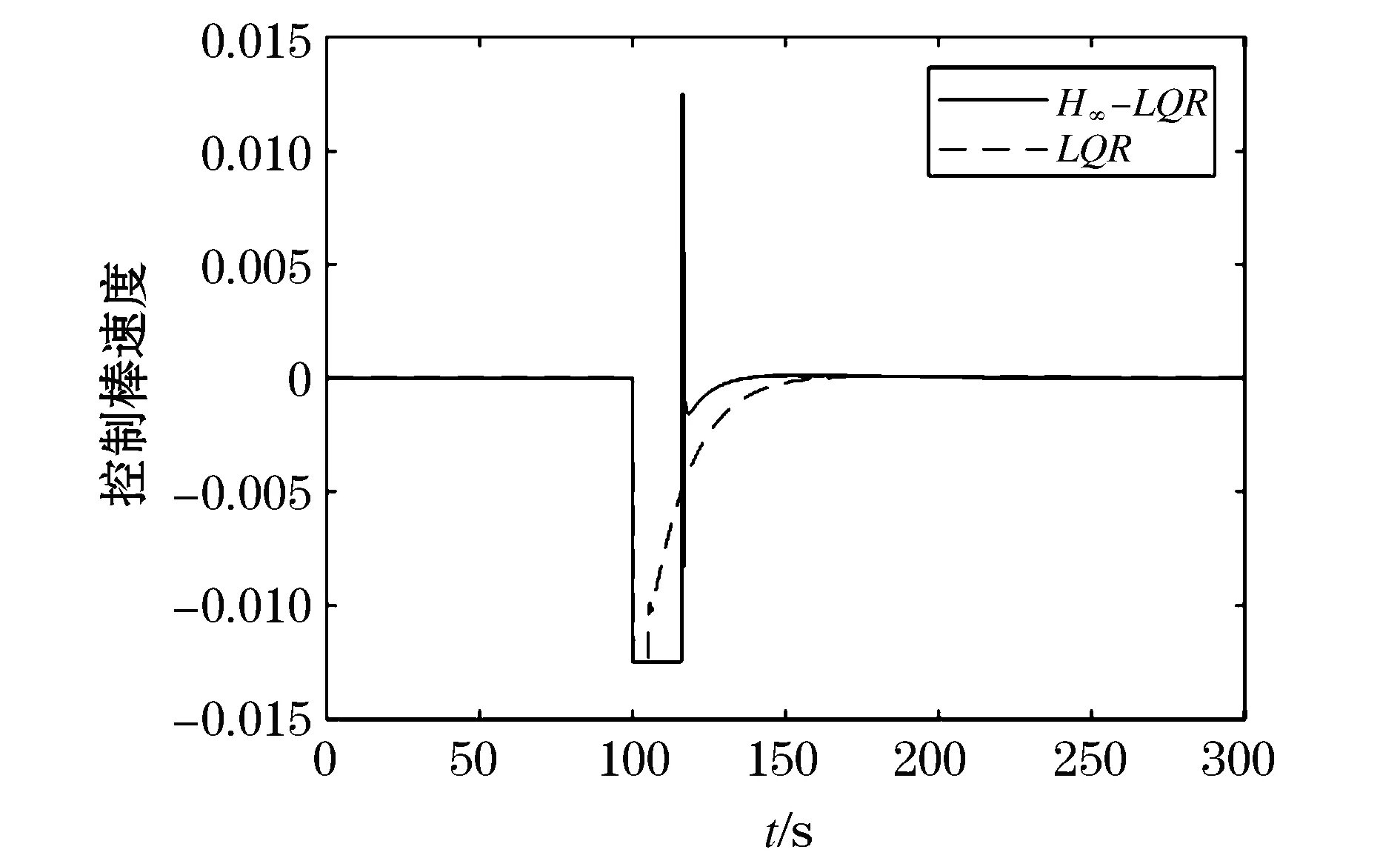
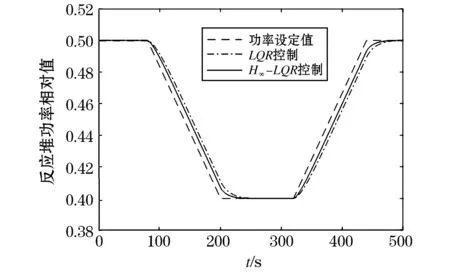
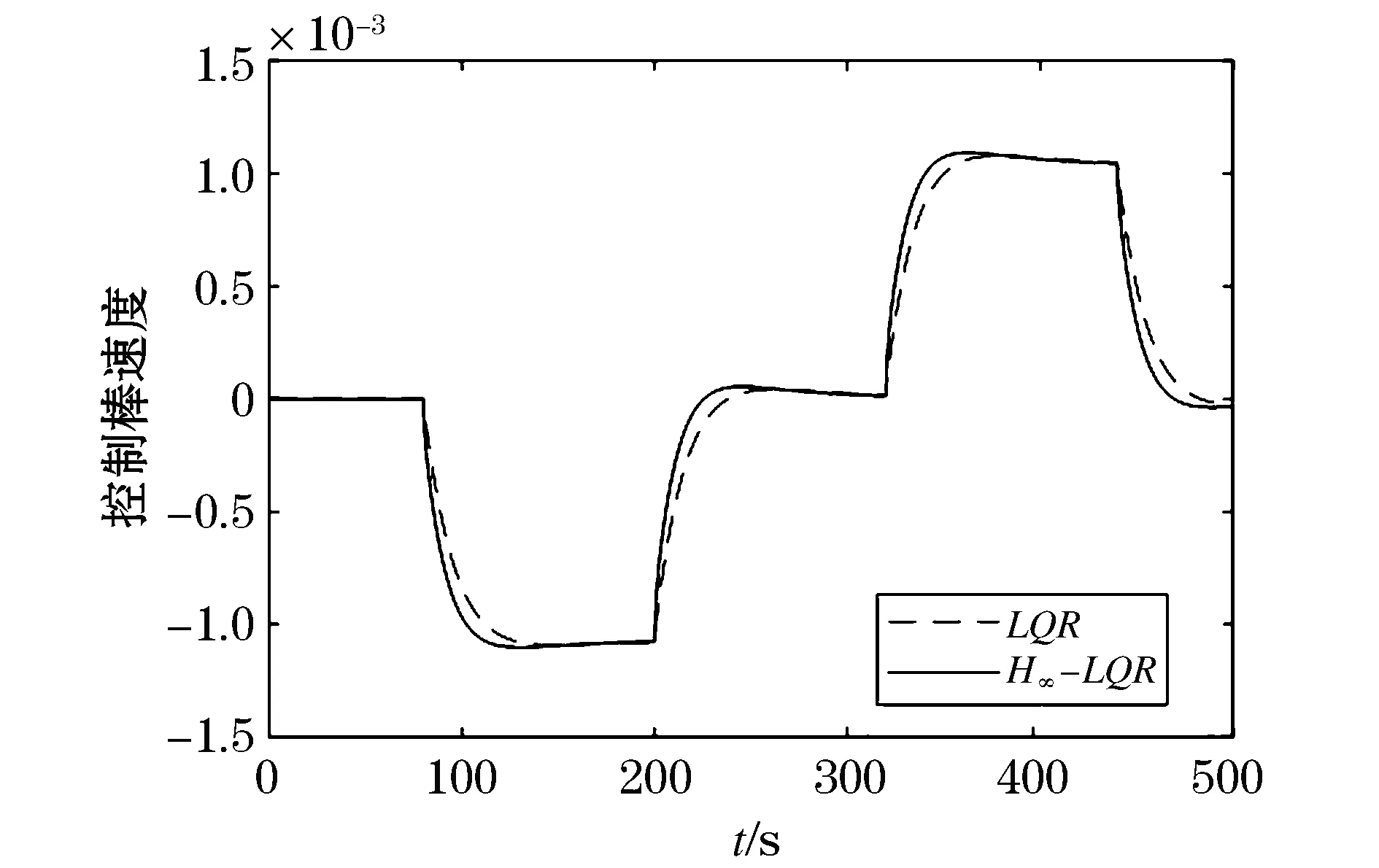
(1≤i (18) 如果性能指标(6)中的H∞性能指标为0,可以用同样的思路构造LQR控制律,有如下推论. 推论1 给定正数ε、权值矩阵Qi和R,如果存在对称正定矩阵X和矩阵Wi,i=1,2,…,5,满足如下线性矩阵不等式组: (1≤i≤5) (19) (1≤i (20) 则控制律(13)是核反应堆功率系统(4)的一个模糊LQR控制律. 本文基于Matlab/Simulink平台进行数值仿真,首先选择如下性能指标: (21) 性能指标(21)的选取主要考虑系统的跟踪性能、控制棒的棒速和两种温度效应,其中冷却剂出口温度的变化权值更高,并且权值随初始功率的变化而变化,冷却剂出口温度和功率跟踪偏差的积分所对应的权值与初始功率成反比,即功率越低权值越大. 这里设定控制棒棒速的变化区间为: -0.012 5≤zr≤0.012 5 (22) 结合定理1,利用Matlab中的LMI工具箱得到状态反馈H∞-LQR跟踪控制器的增益为: K1=[-5.4443 -1619.4 -3.2383 -79.6937 -96507 862.2283] K2=[-0.8770 -261.0585 -0.5220 -12.8506 -15559 139.0183] K3=[-0.3818 -113.9498 -0.2278 -5.6141 -6793 60.7171] K4=[-0.2456 -73.5698 -0.1471 -3.6295 -4387.1 39.2284] K5=[-0.1502 -45.1126 -0.0903 -2.2269 -2690.3 24.0557] 根据式(13)可以得到H∞-LQR模糊跟踪控制器.本文采用六组缓发中子的非线性模型进行系统仿真,选取两种典型反应堆功率变化的瞬态工况进行仿真验证. 工况A(功率阶跃变化):仿真时间300 s,初始功率水平为100%FP,功率设定值在100 s时刻阶跃至80%FP,之后稳定在该功率水平上. 工况B(功率线性变化):仿真时间为500 s,初始功率50%FP,功率设定值在80 s时刻以5%FP/min速度线性下降至40%FP,之后在320 s时再以同样的速率线性上升至50%FP. 两种工况下的仿真结果如图2~7所示,从图2和图5可以看到当反应堆功率设定值发生变化时,功率偏差信号不为0,在控制器的作用下控制棒动作使得实际输出功率跟踪期望值,其中H∞-LQR跟踪控制器的控制性能优于LQR控制器,调节时间短且反应速度更快. 图2 相对输出功率(工况A) 图3 控制棒速度(工况A) 图3、4和图6、7中实线对应的是H∞-LQR控制,虚线为LQR控制,在两种工况下,两种跟踪控制器的控制棒速度波动均在设定范围之内,冷却剂出口温度的变化平滑,无超调量,并且H∞-LQR控制器的控制性能优势明显.可见,本文所设计的核反应堆功率的H∞-LQR模糊控制器具有较好的负荷跟踪性能. 图4 反应堆冷却剂出口温度(工况A) 图5 相对输出功率(工况B) 考虑控制棒微分价值的变化,参考文献[11],选取 0.0048≤Gr≤0.048 (23) 图6 控制棒速度(工况B) 对应工况A和B,分别取控制棒微分价值的最高值和最低值进行仿真,得到图8、9,在工况A时,控制棒微分价值越大系统的跟踪性能越好,在工况B时,两种控制棒微分价值对应的输出功率曲线近乎一致,因此,用Gr=0.014 5所设计的H∞-LQR模糊控制器能够保证系统的鲁棒性. 针对核反应堆功率的负荷跟踪控制问题,本文设计了满足H∞-LQR性能指标的T-S模糊跟踪状态反馈控制器,并利用六组缓发中子非线性模型进行仿真验证.从仿真结果可以看出,H∞-LQR模糊状态反馈控制器可以较好地实现负荷跟踪控制,并且具有良好的瞬态性能与鲁棒性.
3 数值仿真

4 结 语
猜你喜欢
国外核新闻(2022年8期)2022-11-24成都信息工程大学学报(2022年3期)2022-07-21邮电设计技术(2021年2期)2021-03-13中国核电(2020年3期)2020-08-13计算机与数字工程(2019年11期)2019-11-29舰船电子工程(2018年12期)2019-01-03考试周刊(2017年7期)2017-02-06安徽理工大学学报·自然科学版(2016年1期)2016-12-14汽车文摘(2016年5期)2016-05-31科技视界(2016年1期)2016-03-30
