新型双船起重拆除平台试验研究
2020-04-10 09:14胡智焕WANGAndy田新亮张卫东
海洋工程 2020年1期
李 巍,胡智焕,李 欣,孙 浩,WANG Andy,田新亮,张卫东
(1. 海洋工程国家重点试验室(上海交通大学),上海 200240; 2. 高新船舶与深海开发装备协同创新中心,上海 200240; 3. 上海交通大学 自动化系,上海 200240; 4. 中远海运特种运输股份有限公司,广东 广州 600428;5. DNV GL Oil & Gas,上海 200336)
全球海洋油气开采设施日益增多,许多老化的海洋平台结构在未来几年里将会面临着退役拆除的问题[1]。对于重量小于5 000吨的海洋平台上层建筑,采用传统起重船的单船吊装技术进行拆除是一种安全且具有经济效益的方案。而对于更重的大型平台,通常需要将平台上部结构分成若干组块,进行分块吊装;这种方案拆除作业时间长、投资巨大。因此需要提出一种更经济、安全、环保的大型平台拆除解决方案。
目前,国内外对单船海上作业的动力特性作了较多的研究。Zou等[2]将浮托安装过程简化为单自由度的垂荡运动,并用分叉图和庞加莱映射的方法描述系统的非线性特性。针对大型海上平台上部组块浮托安装过程涉及的非线性碰撞载荷和水动力特性,Hu等[3]和Kwak等[4]采用数值模拟与模型试验相结合的方法,重点探索了风浪流条件下非线性冲击载荷、船体随波运动和水动力响应的耦合作用。
动力定位系统可以使船舶保持在固定的位置或按照提前设置好的轨迹运动,目前研究成果较多的是单船动力定位控制算法。李晔等[5]针对小型海洋观测平台,建立海流干扰下的运动学方程,研究流向和流速对平台动力定位性能的影响。Du等[6]在未知船体参数和不确定环境扰动的情况下,设计并实现了实时估计环境扰动的观测器,提出了不确定海洋环境作用下的单船鲁棒自适应控制算法。Brodtkorb等[7-8]探索了一种同时兼顾稳态定位性能和瞬态运动响应的运动控制器。Vrnø Svenn等[9]对比和分析了不同控制策略和观测器模型对实船动力定位性能的影响,发现基于线性模型的观测器和控制器能够有效地解决单船动力定位问题。
结合动力定位系统和海上作业,Tian等[10-11]和Zu等[12]开展了大型半潜作业船浮托安装的现场监测研究,通过定位能力玫瑰图分析其动力定位性能(DP-2级),为现场浮托安装工程提供了参考依据。许南等[13-14]对浮托安装船在动力定位辅助下的安装过程进行了模型试验,分析对比了不同角度波浪作用下的定位精度和靠垫碰撞力。Jiang等[15]研究了在波浪和风的联合作用下,双体船—单立柱(Spar)系统起重风机并完成风机与单立柱的对接作业过程的动态响应分析;在数值模型中,他们考虑了单立柱的锚泊系统、双体船的动力定位系统以及液压装置的建模,并分析研究了对接点处的运动响应和锚链力。
对于多船海上作业,当前的研究侧重于多船联合作业过程中的水动力耦合效应和非线性碰撞载荷。Sun等[16]将多体绕射势流理论引入多体运动方程,研究对比了固定式结构物和浮体以及多个浮体之间的运动RAO。采用类似的水动力分析方法,Dessi等[17]针对两艘弹性连接的驳船,建立数值模型并分析双船联合弹性机构的弹性模态和固有频率。Xu等[18]研究了双驳船旁靠时的水动力耦合问题,同时对比了近场法、中场法和远场法对二阶波浪力计算的影响,他们发现远场法的收敛速度更快,对离散网格精度的要求也小。Wang等[19]针对双驳船的时域模拟,对卷积项计算做出了改进,应用状态空间模型辨识时域方程中的卷积项,从而快速计算双船耦合的水动力参数。Spars平台的海上安装通常采用双船浮托安装方法,很多学者通过数值仿真[20]、模型试验[21]和现场监测[22],分析了锚链动态力、多浮体运动特性和连接机构受力,从而判断载荷转移过程的作业气候窗。
目前,随着双船浮托安装法研究的不断深入,装备技术的不断提高,其应用范围越来越广,对海况环境的要求程度也逐渐降低,目前已经可以对20 000 t以上的模块进行安装,不仅可以在有效波高1.5 m,谱峰周期超过8 s的不规则波海况下进行,同时也适用于1.5 m波高的涌浪海况。但该方法对现场实测要求较高,测量成本高,难进行,且受海况限制较为明显[23]。
2017年,一艘新型双体船成功拆除布伦特三角洲的一个重达24 000吨的平台上层建筑,该船专门用于拆卸大型油气平台。而这种拆平台方案的整个施工周期需要12个小时,其中包括动力定位移动进船,甲板支撑单元支架连接,船体压载调节和快速起重托起平台等操作。该平台拆除方案费用极高,为了降低成本并同时满足平台拆除需求,下文提出一种新型双船起重拆除平台方案,并根据该方案开展了水池模型试验研究。
该方案采用两艘半潜船进行平台拆除,施工步骤:
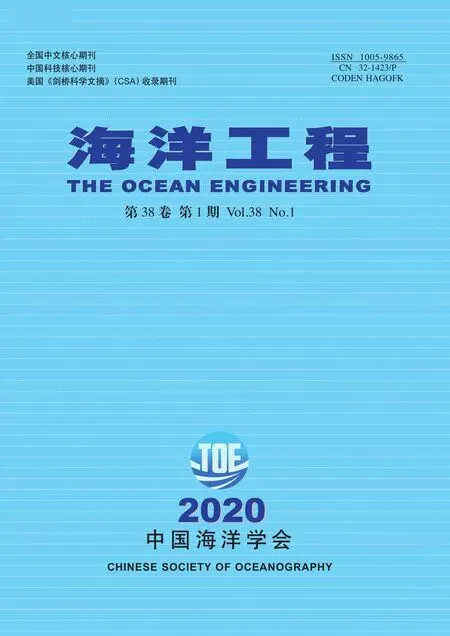
1) 三艘半潜船(以中远海运旗下两艘2万吨级姊妹船康盛口、泰安口(以下简称K级船)和一艘5万吨级祥瑞口(以下简称X级船)为原型),见图1(a))抵达平台所在油田,然后启动动力定位系统。
2) 两艘K级船调节压载水系统,改变吃水以达到要求的干舷和横倾角。
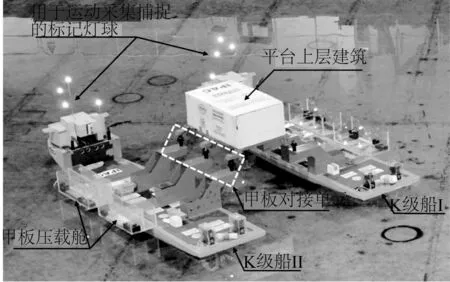
3) 两艘K级船靠近对接位置,即平台上层建筑两侧的下方(见图1(b))。两艘船配备了甲板对接单元(DMU)(见1(c)),DMU主要用于吸收浮托过程中的冲击载荷,并限制两艘K级船舶的运动[3]。
4) 平台上层建筑的托举主要是通过两艘K级船调节压载水系统,改变吃水,将上层建筑逐渐托起,使平台重量开始由导管架向两艘K级船转移;继续压载上浮,直到平台的承重结构从导管架转变为两艘K级船,且确保上层建筑与导管架顶部有足够多的安全间隙。
5)两艘K级船将上层建筑运送至X级船。
6)同时调节两艘K级船和X级船的压载水系统,通过载荷转移使得平台上层建筑的桩腿放在X级船的支撑座(DSU)上(见图1(d)),然后由X级船运输。
图1 双船拆平台过程示意Fig. 1 Sketch of twin-lift decommissioning operation
模型试验在海洋工程水池进行。模型试验主要包括制作船舶模型及设备、搭建船舶控制系统和测量系统;研究在该系统的控制下,双船托举过程中的动力定位性能和低速行驶性能以及评估该拆平台方案的可靠性。
1 基本理论
1.1 船体运动模型
船体三自由度(3DOF)运动方程:
(1)

(2)
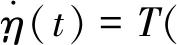
其中,t表示时间,(t)=[xyφ]T是大地坐标系(GB)中的位置向量,v(t)=[uvr]T表示随体坐标系(BODY)中的速度矢量(见图2)。x,y表示在GB中的位置,φ表示船舶在 GB下的艏向角,u,v表示在 BODY中纵向和横向的速度,r表示在BODY中的艏摇速度。旋转矩阵T((t))∈R3×3用于将速度从BODY转换至GB,表示为:
T(
(3)
其中,τ(t)∈R3和τenvironment∈R3表示船舶受到的螺旋桨推力和环境载荷。惯性矩阵M∈R3×3表示刚体质量矩阵和水动力学附加质量之和。D∈R3×3代表阻尼矩阵。为简化数值模拟,将M和D简化为常系数项。
图2 不同的坐标系Fig. 2 Different coordinate systems
由此得到船体的状态空间方程:

(4)
式中:x(t)=[xyφuvr]T,u(t)是控制输入,ω(t)是扰动量,对船体而言:
u(t)=τ(t),ω(t)=τenvironment
(5)

(6)
将以上的状态空间方程离散化,可得,
x(k+1)=A·x(k)+B·τ(k)
(7)
A=I+Δt·Ac,B=Δt·Bc
(8)
其中,Δt是采样时间,I是单位矩阵。
1.2 推力分配
推理分配(TA)将理想控制力作为输入值,计算得到每个推进器(螺旋桨、舵等)的状态。推力矢量τ(t)=(τxτyτN)T由推进器共同产生得到
τ(t)=B(α)·u
(9)
其中,u=(u1u2……um)T∈Rm表示每个推进器产生的力的大小。对于每个推进器,所使用的螺旋桨推力是关于转速ni呈二次相关
ui=Ki|ni|ni
(10)
其中,推力系数Ki可以由推力测量试验得到,从而应用上述公式来估算控制系统中的推力。角度向量α=[α1α2……αm]T∈Rm是每个推进器的方位角,即定义了在水平面上产生的推力方向。矩阵B(α)∈R3×m由下式给出

(11)
第i个推进器在BODY中的位置坐标是(lxi,lyi)。
在模型试验中,采用具有线性约束的二次规划(QP)解决控制分配问题[24],避免了推进系统的奇异点[25]。定义以下QP:


(12)
s.t.

(13)
(14)

(15)

(16)

(17)

(18)
b=τ-B(α0)·u0
(19)
(20)
QP问题可以描述为:
MinzTHz+gTz
(21)
s.t.
Pz≤h
(22)
Cz=b
(23)
MOSEK[26]提供了一个高效稳定的QP求解器,可以实时计算每个推进器的状态(转速和方位角)。
1.3 PID控制理论
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。PID控制器主要是缩小理想值xd(t)和观测值x(t)之间的误差e(t)。由此得到该误差为
e(t)=xd(t)-x(t)
(24)

(25)
PID控制器的实现由下式给出

(26)
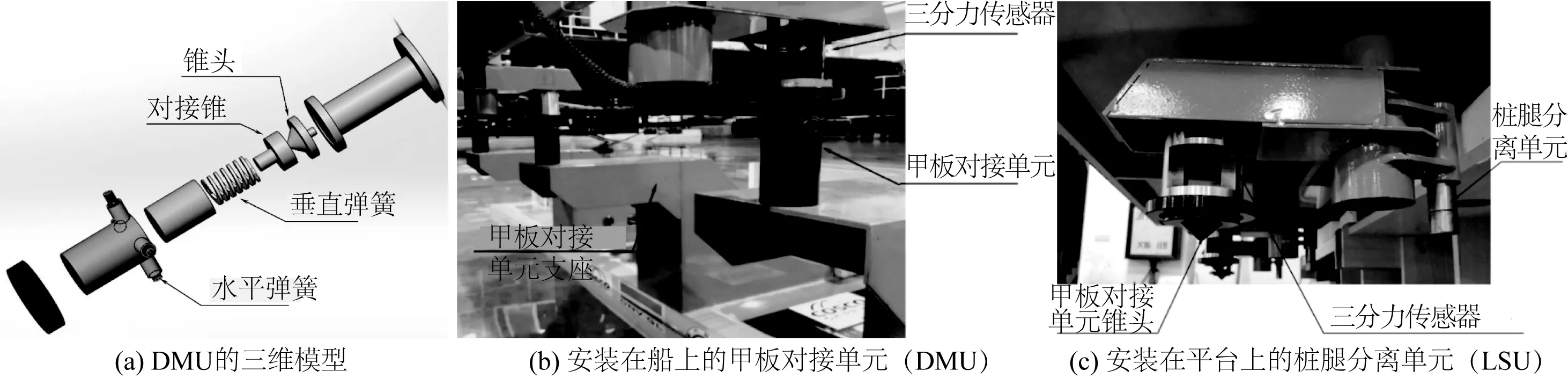
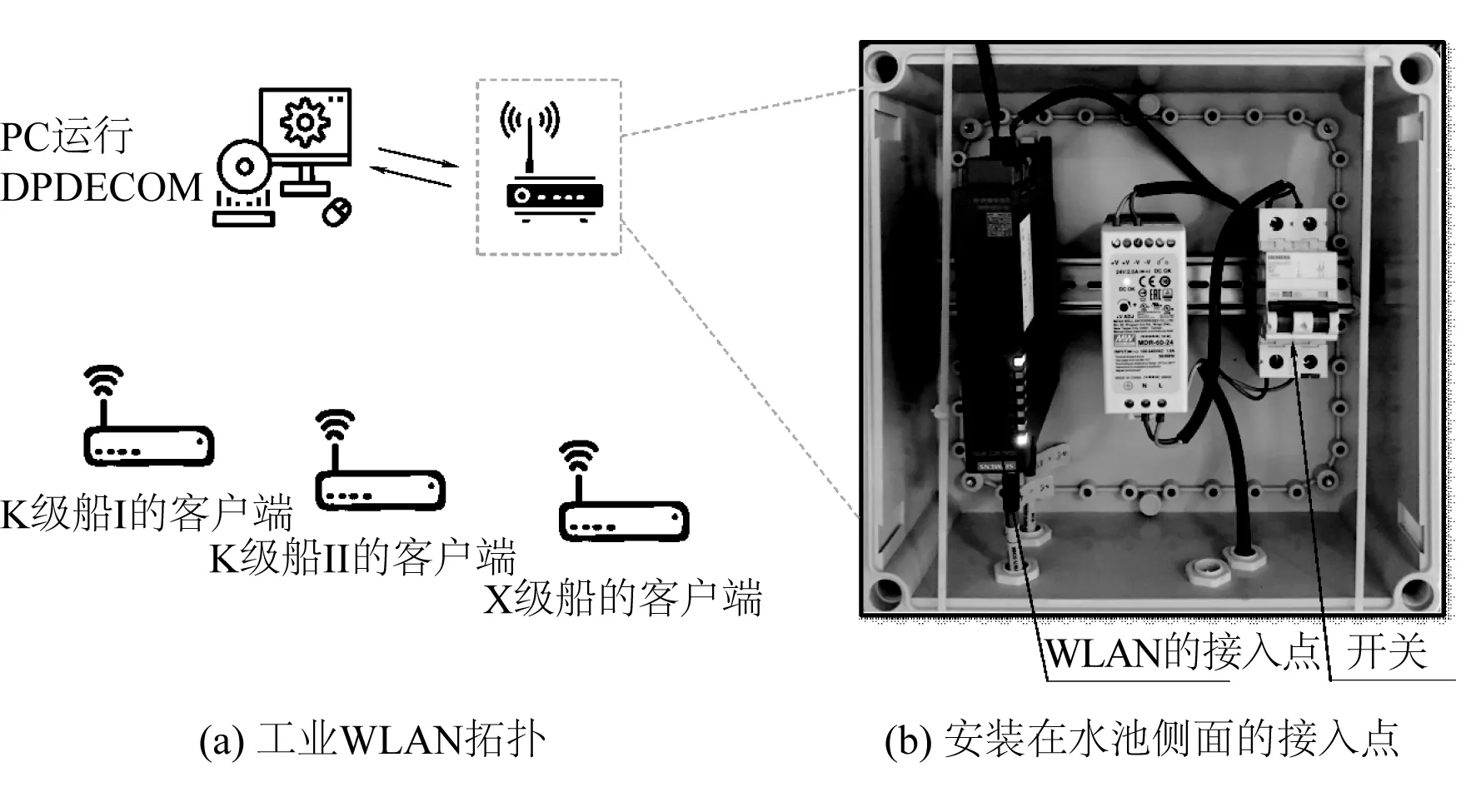
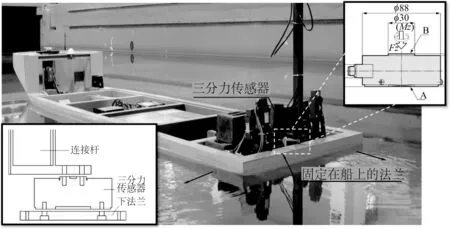
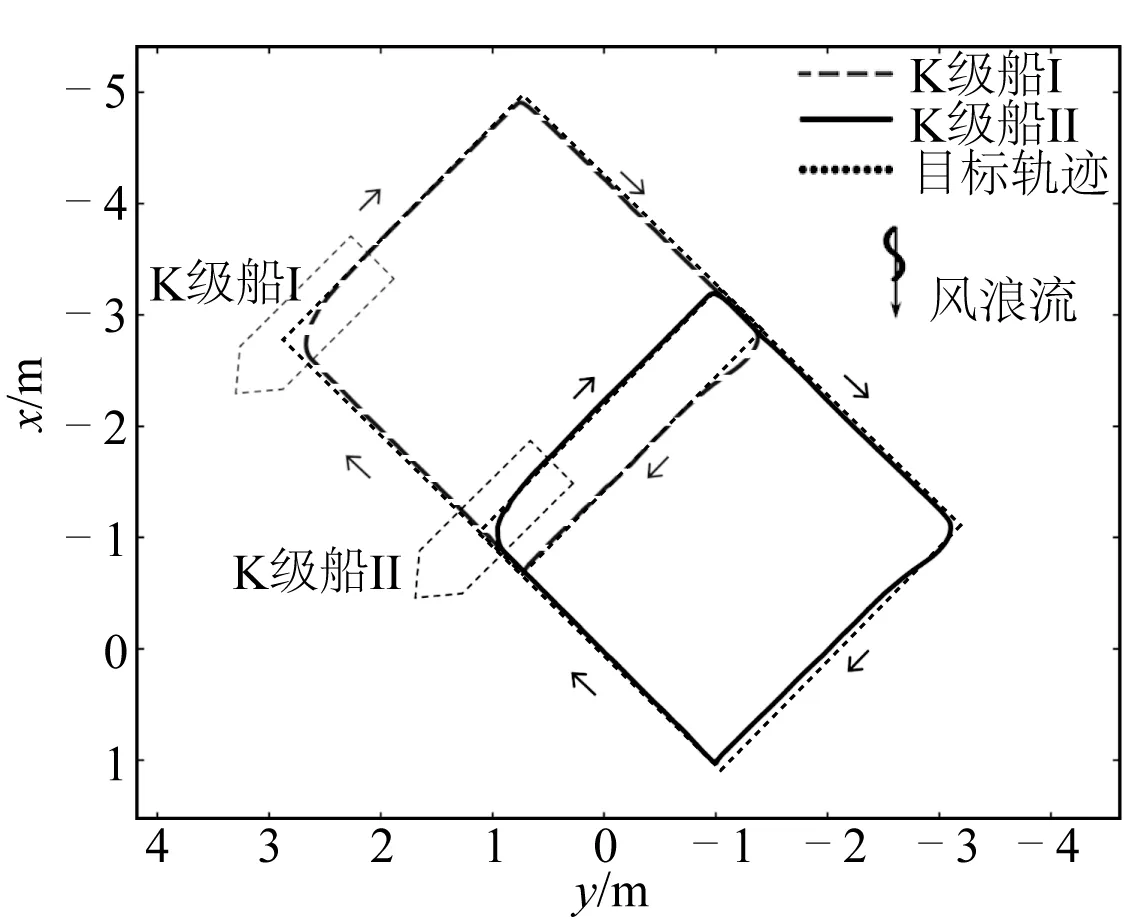
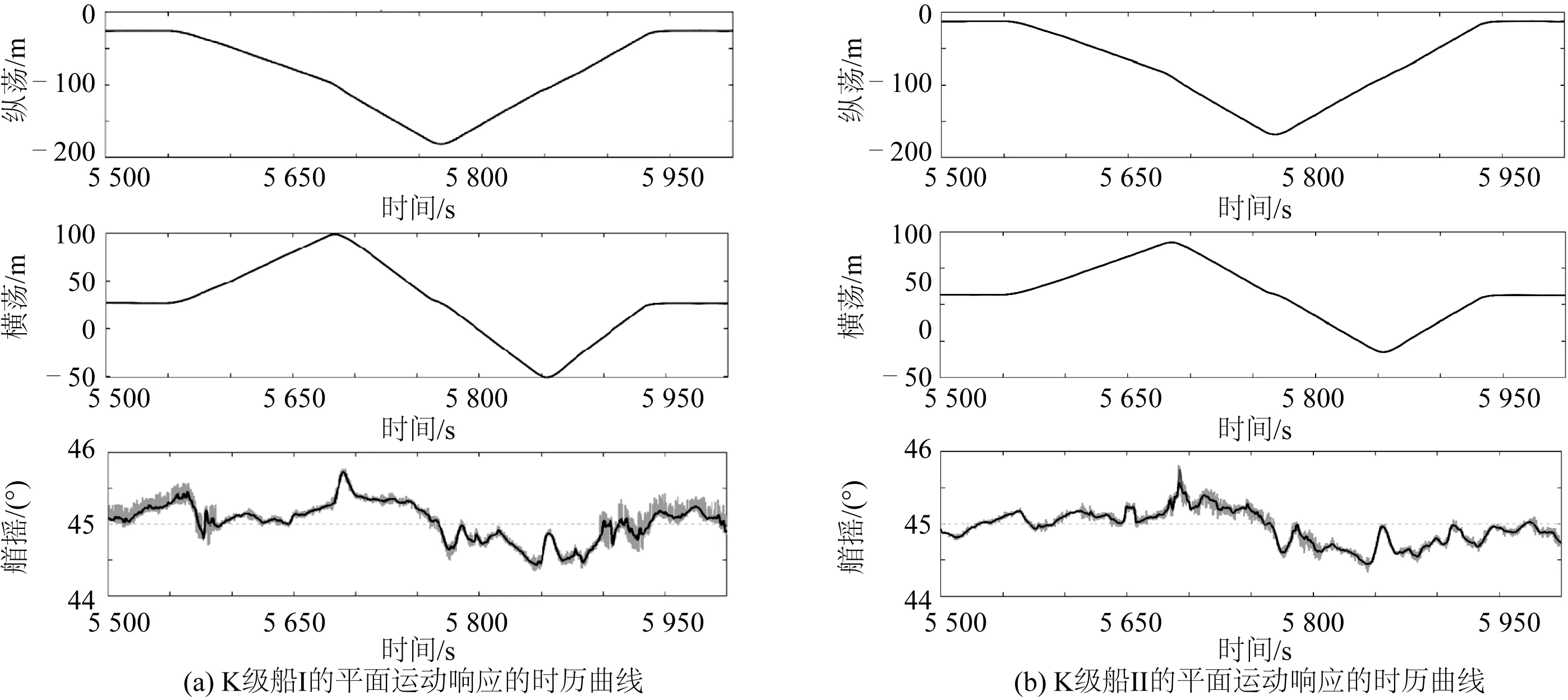
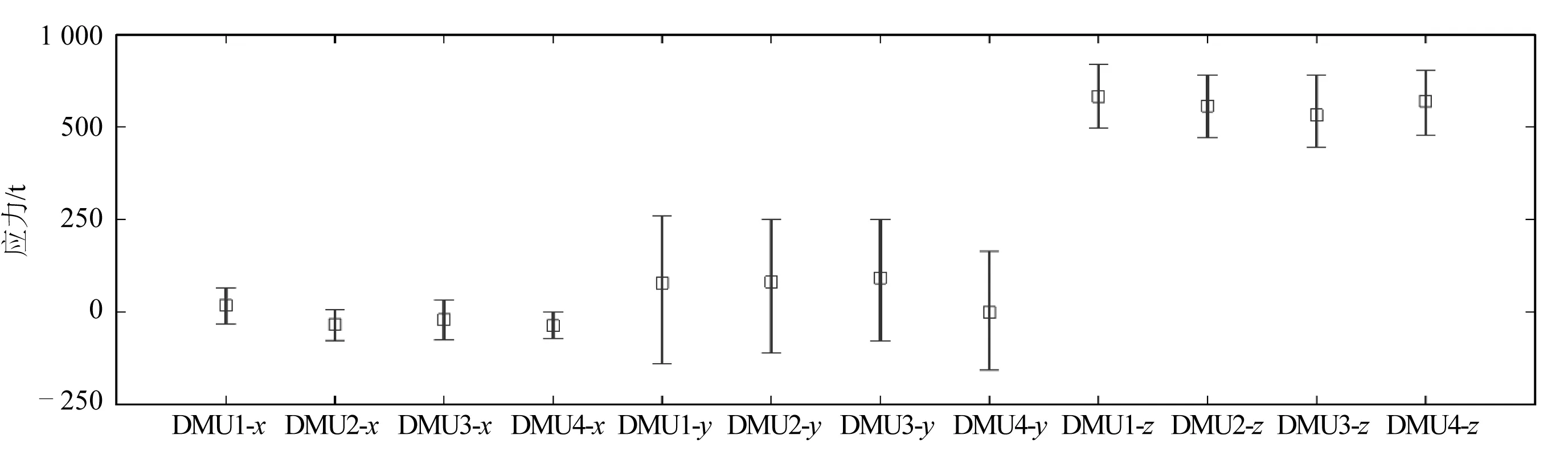
其中,ve表示来自观测器得到的估计速度,N 模型试验中设计了一个装有控制和测量系统的试验平台,该系统主要用于双船起重拆平台试验过程。该试验系统由试验模型、控制系统和测量系统三大部分组成。控制系统和实时测量系统软件采用C++代码实现,包括低通滤波器、速度估计器、卡尔曼滤波器、比例-积分-微分(PID)控制器和推理分配(TA)算法等。试验流程如图3所示。 图3 试验系统流程图Fig. 3 Block diagram of the experimental system 鉴于海洋工程水池的主尺度为50 m×30 m×6 m,模型试验的缩尺比选为37。K级船模长5 m,配备两个艏侧推进器和两个全回转推进器(见图4(a));X级船模长7 m,配备两个艏侧推进器,两个主推进器和两个悬挂式全回转推进器(见图4(b));海洋平台上层建筑钢架模型尺寸为1.5 m×1.5 m×0.4 m,钢架底部设有6个连接件,用于固定甲板对接单元(见图4(c))。 图4 水池试验模型示意Fig. 4 Sketch of wave tank test model 拆平台辅助设备主要包括甲板对接单元(DMU)和桩腿分离单元(LSU)。甲板对接单元由安装在船舶上和平台上的两部分组成:三组甲板对接单元(由水平弹簧和垂直弹簧以及对接锥组成)及其固定支座安装于船舶上。桩腿分离单元由钢质圆筒和弹簧构成,固定在平台连接件上,其作用为限制平台桩腿切割后水平方向上的位移和吸收平台垂直方向上运动产生的能量,如图5所示。这些单元的水平和垂直刚度根据其设计规格进行了测量和校准。 图5 拆平台辅助设备及其组件单元示意Fig. 5 Detailed overview of the decommissioning aid setups and their components DPDECOM是一个多线程C ++应用程序,它是基于图形用户界面Qt 5.5库,线性代数Eigen 3.3库,凸优化求解器MOSEK 7库以及数据库SQLite3而开发出来的。 该程序是根据六自由度采集系统得到的实际数据与目标数据之间的差值,通过PID控制器和推力分配计算出船舶到达目标点所需要的推力大小、角度及作用时间,再将数据指令打包发送至可编译逻辑控制器(PLC),实现对船舶推进器的控制,并实时通过采集和测量系统的反馈进一步调整船舶推进器运作。该程序有三种用于控制每艘船的操作模式,分别是使用操控手柄进行手动控制模式,航向控制模式和动力定位模式。 控制系统由基于二次规划(QP)的推理分配(TA)和PID控制器组成。根据每艘船的推力极限,需要考虑PID控制器的输出极限。因为从六自由度运动采集软件QTM中得到的艏摇角会在±180°之间,所以估计的艏摇角可能会从180°突变到-180°,因此在设计DPDECOM程序时需考虑这样的数据突变问题。 在模型试验中,设备之间的数据传输通过工业无线局域网实现,工业无线局域网(WLAN)包括一个接入点(AP)和三个客户端模块。如图6所示,每艘船都具有一个客户端模块,用于实时接收和发送数据给AP。基于Profinet的工业WLAN能够以更高的优先级进行实时数据传输,且时间延迟小于10 ms。 图6 工业WLAN在模型试验测试过程中工作示意Fig. 6 Sketch of industrial WLAN in the model test 每艘K级船配有2个艏侧推进器和2个全回转推进器。X级船配有2个艏侧推进器,2个全回转推进器,2个主螺旋桨和方向舵。为简化试验,主螺旋桨和方向舵不包括在TA中。对于每个全回转推进器,是用全回转的旋转速率、螺旋桨的转速及其从零到最大推力的响应速度来计算TA中的旋转速度和方位角的约束。对于每个艏侧推进器,还需考虑从左舷最大推力变到右舷最大推力的响应速度。 每艘船上的执行器由可编译逻辑控制器(PLC)、伺服电机和伺服驱动器、变速箱和螺旋桨组成(见图7)。伺服电机通过基于PLC的伺服驱动器使螺旋桨实现精准的速度和角度位置控制。Profinet是工业以太网中的数据通信协议,它实现了伺服驱动器、PLC和客户端模块之间的数据交换。通过集成的实时自动调谐和机器共振的自动抑制,这样的执行器系统自动优化才可以实现高动态性能和平稳操作。 在每艘船上,6个AC交流伺服电机带动螺旋桨转动并产生推力。其中,四个带有增量式编码器的电机用于首侧推和全回转螺旋桨的速度控制;两个带有绝对式编码器的电机用于全回转螺旋桨的角度控制。 图7 K级船推进器系统主要组成部件Fig. 7 Main components of actuator system on the K-class vessel 图8 双船拆平台作业水池试验示意Fig. 8 Sketch of wave tank test for twin-lift decommissioning operation 模型试验中,测量系统主要分为六自由度运动采集与分析系统、推力测量系统和应力测量系统。 六自由度运动采集系统能以亚毫米级精度实时测量多个运动物体的位置和姿态。运动捕捉相机可以识别固定在每个船体上的4个标记灯球(见图8),通过4个灯球所构成的刚体可得到船模的六自由度运动数据。 DPDECOM程序可以通过TCP / IP接口实时接受从六自由度运动采集与分析系统服务器处理后的实时6DoF运动数据。在模型试验中,运动捕捉系统的采样频率设置为50 Hz。使用动态的均值滤波器来消除原始运动数据中的噪声,从而实现可靠的速度估算。 模型试验中的推力测量系统主要为了获得船模推进器转速与推力之间的关系以及每个推进器的推力系数。从而对其方位推进器进行禁区测试,进一步估算不同转速下的推进器的推力大小。如图9所示,当A平面通过下法兰与船体固定,B平面与连接杆保持固定时,推进器工作对船体产生推力,力传导至下法兰与传感器上,最终可以获得每个推进器不同转速下的推力。 同时,为得到各个推进器的运作情况,开发了伺服电机测量系统,可根据伺服电机的运行状态得到推进器的螺旋桨转速和方位角。该系统是基于工业WLAN实现数据传输,可以实时测量和显示每艘船上伺服电机的运行状态,包括每个伺服电机的功耗、转速或角度以及报警信号。 图9 K级船I的全回转推进器的推力测量(左方位角90°,右方位角0°)Fig. 9 Thrust measurement on the twin azimuth thruster of K-class-I vessel (left azimuth=90°, right azimuth=0°) 应力测量系统由应力采集装置和应力测量装置两部分组成(见图10)。应力采集装置中的工控机(IPC)用于采集和保存甲板对接单元(DMU)中锥头与对接锥之间的作用力,即平台上层建筑与K级船之间的作用力,同时基于TCP/IP通信协议发送数据至应力测量装置。应力测量装置可以实时接收和显示各个DMU中x、y、z三个方向上的受力情况。 图10 应力测量系统流程及模型示意Fig. 10 Block diagram of the force measurement system and diagram of model 螺旋桨的推力采用量程为500 N的三分力传感器进行测量,即沿船长(x)方向、沿船宽(y)方向和垂向(z)上进行力的动态测量。对K级船的艏侧推进器和全回转推进器进行了推力测量,试验结果如图11所示。从图11(a)和图11(b)可以得到船模艏侧推进器正转和反转的推力大小与转速成正比,艏侧推进器正转至3 000转速时的推力约为反转时候的2倍。图11(c)表示船模前进时(方位角为0°)推进器转速与推力大小的关系;图11(d)表示船模后退时(方位角为180°)推进器转速与推力大小的关系,其变化趋势满足图中所拟合的二次函数,推力大小与转速成正比,且船模前进时推进器的推力略大于后退时的推力。图11(e)和图11(f)表示的是左推进器方位角为90°,右推进器方位角为0°时,即船模向右运动时推进器转速与沿x和y方向上推力大小的关系。 图11 K级船推进器转速与推力之间的函数变化关系Fig. 11 Variation of thrust as a function of rotational speed of K-class vessel 由图可知两个方向上的推力大小随转速的变化基本一致。除了以上几组数据,试验还分别得到了左右推进器方位角为45°和135°时转速与推力大小之间的函数关系。 通过推力测量试验,可得到每个推进器转速和推力之间的函数关系,以及相同转速下推进器处于不同方位角时对船模x和y方向的推力大小的函数关系,这证明了螺旋桨—船体相互作用引起的推力损失效应可以忽略不计。因此,在DPDECOM程序中可以使用恒定的推进器系数来估算每个螺旋桨的推力。 为了测试双船的协同性和DP系统的性能,在海洋工程水池中同时模拟不规则波浪(Jonswap)和恒定风速场,并让两艘K级船沿着规定路线同步进行低速运动,测试两艘船在位置和姿态一直处在动态变化时两者之间的同步性。 图12 K级船I和K级船II船的运动轨迹Fig. 12 Trajectory of K-class-I vessel and K-class-II vessel 接着进行两艘K级船托举平台上层建筑沿矩形轨迹低速运动的测试,即模拟双船运输上层建筑至x级船的过程,并在该过程中对甲板对接单元的受力进行实时测量,通过试验效果和测量结果来反映该过程中双船的协同性和DP系统的稳定性。工况参数为上层建筑载荷为50%,Jonswap波浪谱参数为Hs=0.75 m,Tp=6 s,θ=135°,恒定风速为VW=1.35 m/s,θ=135°时的双船托举平台上层建筑沿矩形轨迹低速运动的试验结果如图12和图13所示。 双船托举平台上层建筑沿矩形轨迹低速运动的轨迹如图12所示,虚线表示K级船I的运动轨迹,实线表示K级船Ⅱ的运动轨迹,点线表示试验的目标轨迹,艏摇角为45°,且在运动过程中船艏角度始终保持不变。由图可知运动轨迹误差较小,DP控制精度符合试验要求,稳定性良好。 图13(a)为双船托举平台上层建筑沿矩形轨迹低速运动过程中K级船I的运动响应,分别是船模纵荡、横荡和艏摇的时历曲线。由K级船I的艏摇时历曲线可以看到在实时低通滤波之后船模艏摇曲线的数值大致稳定在45°,即表示在运动过程中船头朝向始终为45°。图13(b)为双船托举平台上层建筑沿矩形轨迹低速运动过程中K级船Ⅱ的运动响应,可见其运动曲线变化趋势与K级船I基本一致。由图中数据可知该工况下双船间的相互干扰小,在研究分析所有角度工况下双船间的干扰性后,得到90°情况下双船之间的干扰最大,但仍然能够保证平台拆除工作稳定进行,满足安全施工要求。 图14为双船托举平台上层建筑沿矩形轨迹低速运动过程中DMU应力测量统计结果,试验过程中共采集了位于四角的四个DMU的应力数据,如图10所示。图14中的线段长度为试验过程中DMU应力变化的范围,小方框所在的数值点为这一过程中的应力均值。在该工况下,四个DMU在x和y方向上的应力均值稳定在0左右,并未出现某一点应力过大或者过小的现象,说明整个双船托举平台上层建筑沿矩形轨迹低速运动过程中平台与船之间受力均匀且稳定,而单个DMU在z向可承受最大载荷为815.248 t,则整个系统对于垂向载荷最大可承受值为4 891.488 t。因此,通过轨迹图、运动响应时历曲线和DMU应力测量结果,可以验证试验在完成既定轨迹的前提下,得到双船同步性能和DP系统稳定性良好的结论。 图13 K级船的平面运动响应的时历曲线(黑线表示实时低通滤波之后的数据)Fig. 13 Time variation of planar motion response of K-class vessel (black line indicates low-pass filtered data) 图14 矩形轨迹运动试验中的DMU应力测量统计Fig. 14 Statistics of DMU load during the 4-corner maneuver test 针对一种新型双船拆除平台方案,开展了试验研究。采用PID控制器和基于二次规划的推力分配算法,使得单船、双船协同都能够实现动力定位和低速航行能力,同时也实现了双船托举平台上层建筑沿规定轨迹低速运动的能力,验证了双船拆除平台方案中双船运输这一关键环节的可行性和安全性。同时开发了试验测量系统,以确保水池波浪试验和未来实际运行的高效性和安全性。DP控制主要是克服船体的二阶波浪力、风力和流力,而试验中的风采用了定常风,使得DP控制难度降低,但实际中非定常风对拆平台操作的影响巨大,还有待进一步试验研究。2 试验概述

3 试验模型
3.1 船舶几何模型

3.2 拆平台辅助设备
4 控制系统
4.1 软件构架
4.2 数据通信系统
4.3 执行系统

5 测量系统
5.1 六自由度运动采集与分析系统
5.2 推力测量系统
5.3 应力测量系统

6 试验结果与分析
6.1 推力测量试验


6.2 动力定位试验—矩形轨迹运动演示
7 结 语
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2021年12期)2021-03-29
航空发动机(2020年3期)2020-07-24
水利规划与设计(2020年1期)2020-05-25
民用飞机设计与研究(2019年2期)2019-08-05
当代陕西(2018年12期)2018-08-04
电子制作(2017年20期)2017-04-26
舰船科学技术(2016年1期)2016-02-27
小学生时代·大嘴英语(2014年6期)2014-11-04
中国船检(2013年10期)2013-08-15