基于Workbench狂呼乘人加速度计算及束缚装置选型
2020-06-09 07:23苏晓峰赵九峰丁舟波李雁冰
机械 2020年5期
苏晓峰,赵九峰*,,丁舟波,李雁冰
基于Workbench狂呼乘人加速度计算及束缚装置选型
苏晓峰1,赵九峰*,1,丁舟波2,李雁冰1
(1.河南省特种设备安全检测研究院,河南 郑州 450008;2.中原工学院 机电学院,河南 郑州 450007)
以狂呼为例,给出了乘人加速度理论计算方法;并利用Workbench仿真软件,进行狂呼动力学仿真分析,提取狂呼乘人加速度时间历程曲线。与理论计算分析比较,仿真结果和理论计算结果非常接近,表明仿真计算结果的可靠性和正确性。通过对乘人加速度的计算,确定设计加速度的分区,指导乘人束缚装置的选型。其计算方法和结果可为旋转类游乐设施乘人加速度的计算和束缚装置的设计选型提供参考,通过束缚装置本体的可靠性来约束和控制游客的不安全行为,提高游乐设施的本质安全。
狂呼游艺机;加速度;束缚装置;动力学;虚拟样机;游乐设施
狂呼是一款大型观览车类游乐设备,乘人乘坐在中心对称的两个自由旋转的座舱上,大臂在360°旋转时,时而失重坠落,时而超重上升,同时座舱依靠离心力自由旋转[1]。
游乐设施的动态设计,主要考虑机构的运动加速度不能超过人体的承受范围。设备在运行过程中只要有加速度就会产生惯性力,加速度越大惯性力越大。乘人本身质量产生的惯性力会直接作用在乘人身上。惯性力超过一定限度就会对人身造成伤害,所以有必要规定加速度的允许值[2]。游乐设施采用的是加速度,与通常概念中的加速度有所不同,而标准中对加速度的分析和校核方法未加详细说明,因而给加速度的分区带来一定的困扰[3]。
本文在分析狂呼运行特点和载荷特性的基础上,利用虚拟样机技术建立狂呼整机的动力学模型,进行狂呼动力学仿真分析计算乘人加速度,并与传统力学计算结果比较。通过对乘人加速度的计算,确定设计加速度的分区,并确定如何通过加速度的分区来指导乘人束缚装置的选型。
1 乘人g加速度理论计算
1.1 人体坐标系
加速度是实际加速度与重力加速度的比值,游乐设施中的“实际加速度”和运动学中的加速度的大小和方向不同,运动学中的加速度为速度随时间的变化率,是描述速度变化快慢的物理量,加速度是矢量,方向为速度变化的方向,与合外力方向相同。而游乐设施中的加速度实质上是惯性加速度,与惯性力(包括重力)方向一致,其大小包含重力加速度[3]。
为保证乘人不受伤害,游乐设施乘人的加速度应限制在一定的范围内[4],欧盟、美国、澳大利亚标准中对此进行了详细规定。如欧盟标准给出了加速度的定义,并给出了人体空间坐标系各个方向的加速度及合成加速度的限定范围,且规定乘人束缚装置须根据乘人加速度的分区进行选型[3]。GB 8408-2018《大型游乐设施安全规范》[4]引用欧盟加速度部分的规定。人体坐标系规定人体前后方向为轴,压紧为正,拉开为负;体躯干头脚之间方向为轴,压紧为正,拉开为负。如图1所示。
根据GB 8408-2018中图3~图5,确定向加速度a、向加速度a、组合加速度a/a的许用值,可判定乘人加速度是否符合GB 8408-2018要求。

图1 人体坐标系示意图
1.2 狂呼乘人加速度计算
狂呼游艺机如图2所示,为固定式,由底板、立柱、回转臂、座舱等部分组成;回转臂通过机座与立柱连接,回转臂中心是机座,有两组驱动装置,分别由电机、减速器、小齿轮、回转支承进行减速驱动。游客坐在座舱上,设备顶部2台电机驱动使回转臂沿水平面作360°旋转,同时座舱在离心力作用下自由旋转。
座舱组件运动过程中,受到重力加速度和离心加速度的双重作用,由于绕着水平轴旋转,离心加速度方向背离中心水平轴,重力加速度方向始终向下。
座舱运行过程中的加速度如图3所示,有:
式中:为离心加速度,m/s2;为狂呼回转臂的半径,=9.9 m;为回转角速度,当回转臂稳定运行时,=0.73 rad/s。
计算得:=5.3 m/s2
根据夹角公式,有:

可得:
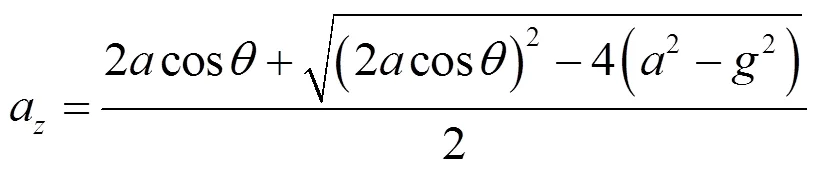
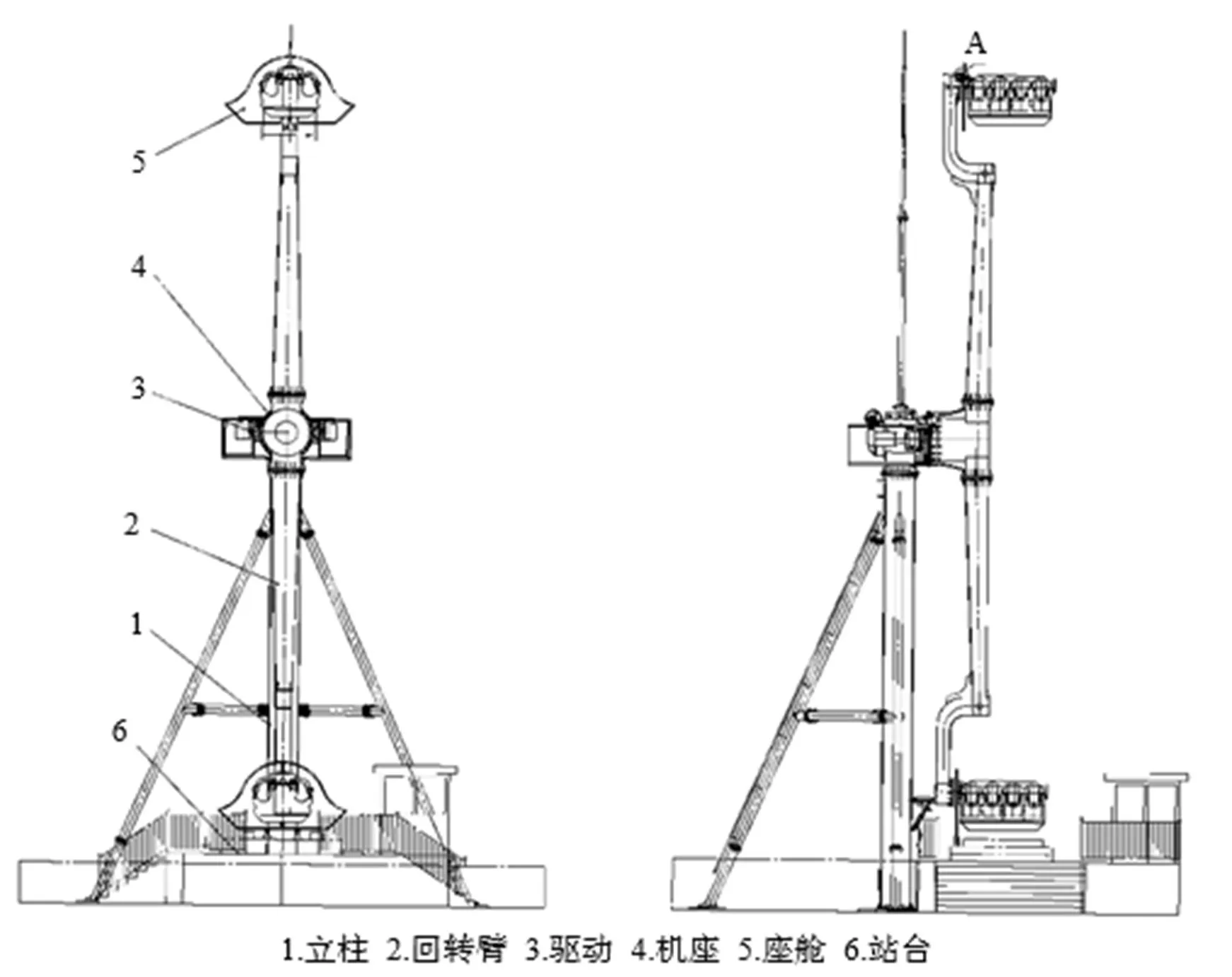
图2 狂呼结构简图
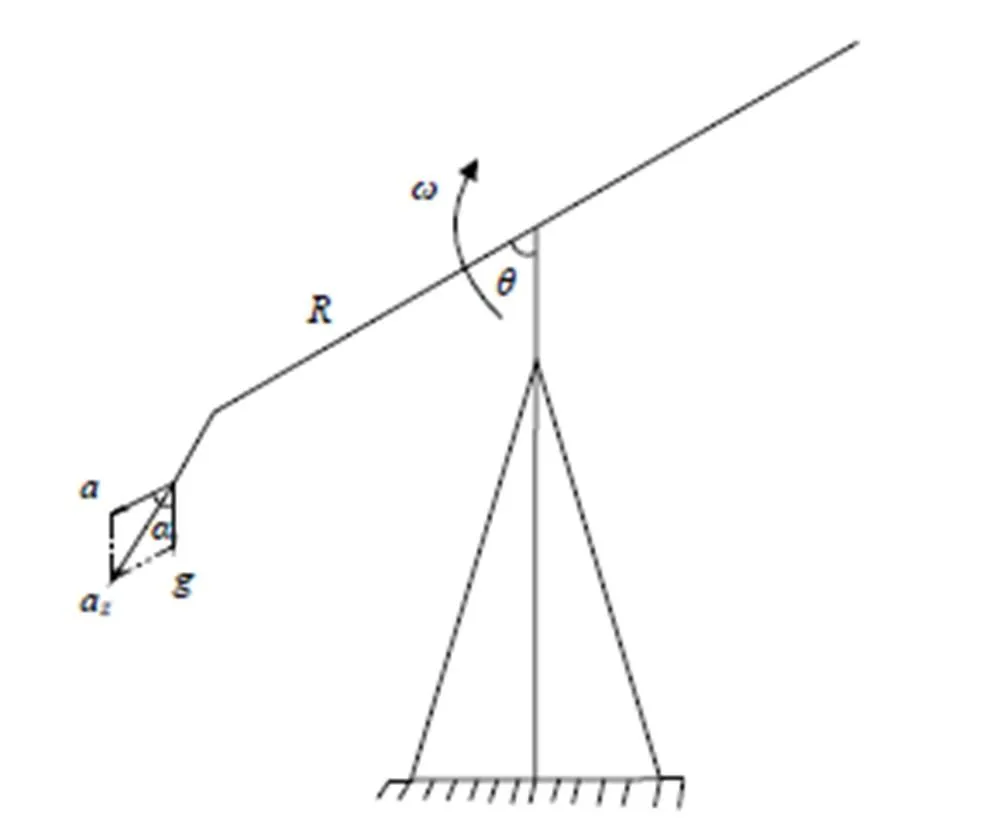
图3 乘人加速度示意图
由式(3)可知,运行到最底部时,=0°,重力势能转化为动能,速度最大,此时的向加速度最大,为:
a=15.1 m/s2=1.54
运行到最顶时,=180°,向加速度最小,为:
a=4.5 m/s2=0.46
故:a=[0.46, 1.54]
由文献[4]图4可知竖直向下[a]=6(1-10%)=5.4。竖直向下相对加速度,由载荷特性分析:a=1.54﹤[a]=5.4,表明竖直方向加速度满足设计要求。
狂呼旋转过程中,座舱处于旋转状态,由式(2)可知,当回转臂转动到水平位置时,离心加速度与重力加速度夹角最大,此时座舱与竖直方向的夹角为:

由于座舱为背靠背状态,乘人加速度对称,故:
a=[-0.48, 0.48]
由文献[4]可知,+方向的最大加速度不超过6,-方向的最大加速度不超过3.5[4]。表明乘人前后方向的加速度满足设计要求。
由于乘人向(侧向)无运动,则对应的侧向+加速度a=0。
综上:a=[-0.48, 0.48],a=0,a=[0.46, 1.54]。
2 狂呼的动力学分析
Rigid Dynamics是ANSYS Structural产品的一个附加模块软件,它集成于Workbench环境下,在Structural所具有的柔性体动力学(瞬态动力学)分析功能的基础上,基于全新的模型处理方法和求解算法,专用于模拟由运动副和弹簧连接起来的刚性组件的动力学响应[5]。
Rigid Dynamics提供了完整的运动副类型来自动定义构件的运动关系,并提供了丰富的载荷库,以此来创建完全参数化的机械系统动力学计算模型。在求解算法上,Rigid Dynamics采用了无需迭代计算和收敛检查的显式积分技术,并提供了自动时间步功能,来快速求解复杂系统的动力学特性,输出位移、速度、加速度和反作用力等历程曲线[5]。
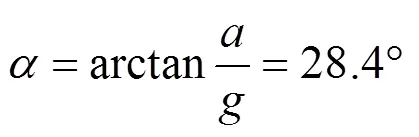
2.1 载荷与约束
首先依据狂呼的总体尺寸,创建狂呼的有限元实体模型,并分别设置质量属性,进行几何样机的装配,建立装配体模型,在此基础上,进行动力学模型的建立[6]。每个乘人质量为72 kg,利用质量单元(Point Mass),附加到座椅的相应位置。
支架部件的底板固定在地面,因此在立柱底板与地面之间,施加固定(Fixed)约束,模拟底板与地面之间的紧固连接;立柱和撑架与机座之间通过法兰螺栓固定连接,施加固定(Fixed)约束;在电机、驱动轮的作用下,回转臂部件绕上部机座中心转动,座舱通过回转支承与回转臂端部连接,在重力和离心力作用下自由旋转,在相对转动的约束部位,施加旋转幅(Revolute)[7]。
运行稳定状态下,回转臂部件绕着中轴线转动的最大角速度为0.73 rad/s。在相对运动的部位,施加驱动载荷(Joint Load),载荷类型为角速度(Rotational Velocity),由于狂呼为单向旋转类型,启动时间15 s,达到最大速度,模拟狂呼在整个运行周期内的各种参数,总驱动时间为45 s。
狂呼在整个运行周期内始终受到地球重力的作用,施加重力加速度为9.8 m/s2,方向为负向。载荷与约束如图4所示。
2.2 结果提取与分析
通过对狂呼动力学仿真分析,可以得到狂呼座舱乘人在运行中的速度、加速度的时间历程[8]。提取加速度参数,得到图5。
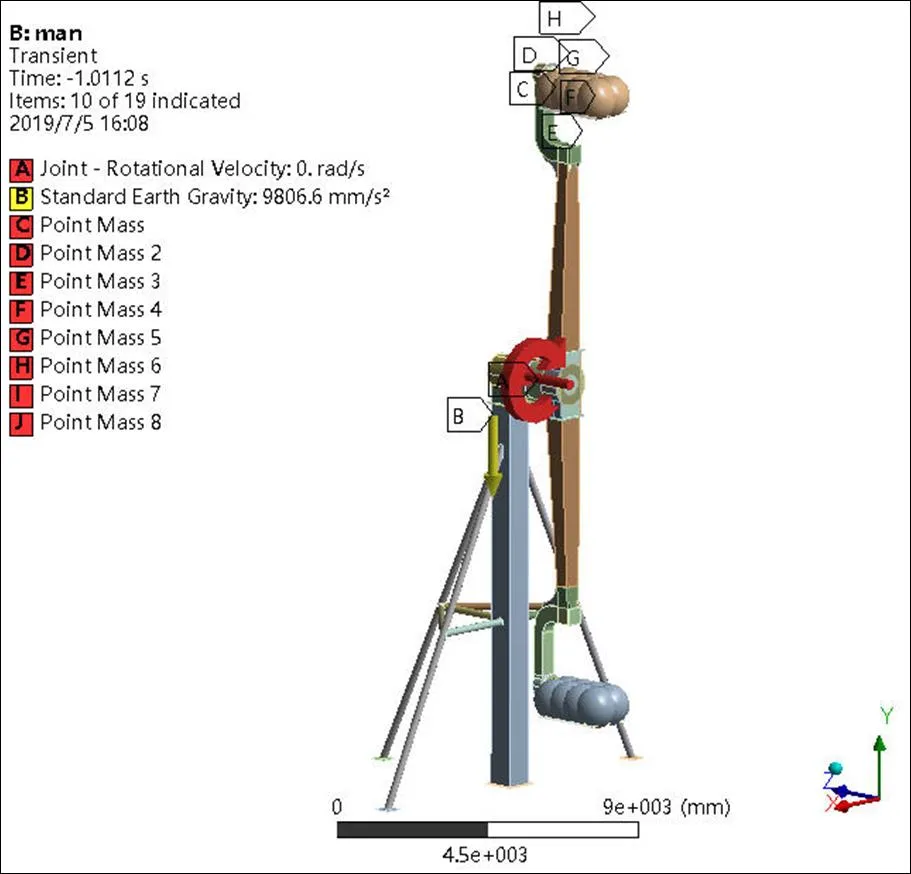
图4 载荷与约束
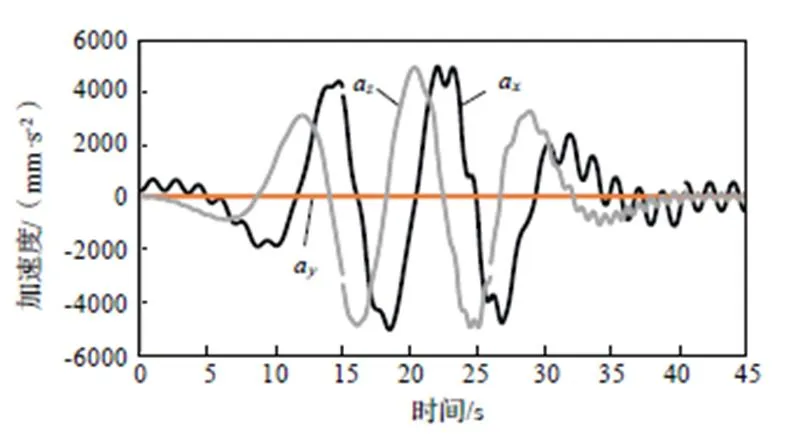
图5 局部坐标系下乘人加速度
由图5可知,乘人的最大水平加速度为:
a=5.02 m/s2=0.51
乘人的最大侧向加速度为:
a=0
乘人的最大竖直加速度为:
a=±5.11 m/s2=±0.52
由于竖直加速度需考虑惯性加速度,因此:
a=±0.52+1=[0.48, 1.52]
通过以上分析可以看出,仿真结果和理论计算结果非常接近,说明所建立的仿真模型合理,也说明基于虚拟样机的刚体动力学分析方法和结果的正确性和可靠性。
3 束缚装置的选型
当游乐设施运行时,乘人有可能在乘坐物内被移动、碰撞或者将被甩出、滑出时,必须设有乘人束缚装置。束缚装置包括安全带、安全压杠、挡杆等[9]。乘人通过束缚装置的约束与游乐设施产生一致的运动。安全是游乐设施的根本,与运动加速度相适应的束缚装置的选型是游乐设施的核心技术之一,过多的束缚是一种浪费,过少的约束又是危险的[10]。
由文献[4]可知,乘人设计加速度的区域划分如图6所示,需依据加速度区域划分进行束缚装置选型。由图6可知大型游乐设施人体坐标系下的、、方向的设计加速度,当加速度a<0(向前)或a<0时(向上),存在将乘人与座舱分离的力,需要安全可靠的乘人束缚装置。随着加速度区域由低向5级递增,危险性不断增大,应逐渐采取强化措施,提高乘人束缚装置的安全性和可靠性。
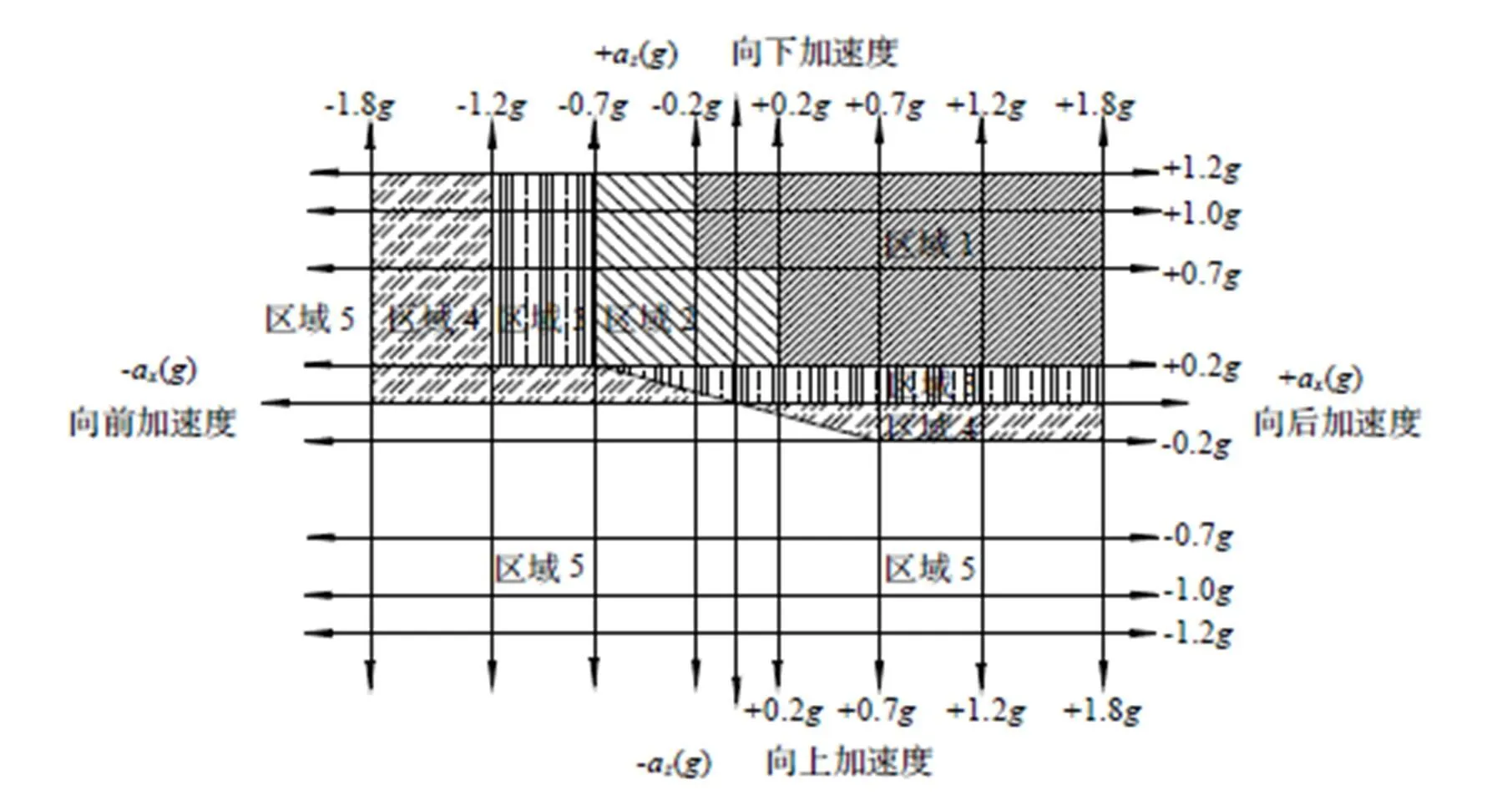
图6 设计加速度的5个区域
由第1.2节可知,狂呼乘人前后方向、竖直方向的加速度均满足设计要求。
综上,狂呼乘人对应设计加速度在图6区域2。由文献[4]知,区域2对应2级束缚装置。根据文献[4]对束缚装置的具体要求,设计一套狂呼的束缚装置,如图7所示。
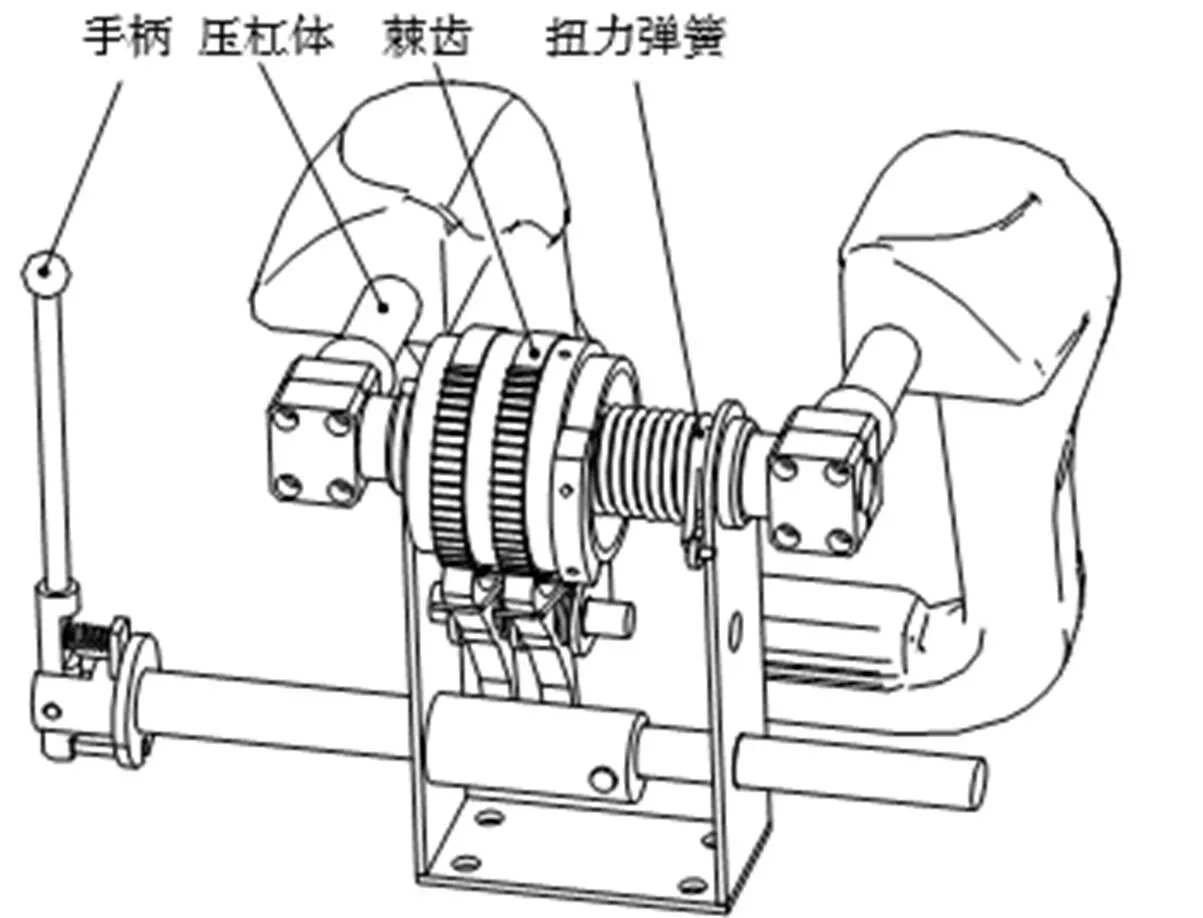
图7 狂呼束缚装置
狂呼每个座舱有一套压杠体装置和安全带;锁紧装置为棘齿啮合锁紧,可以根据乘人体型进行调节,依靠棘齿内弹簧实现自动锁紧;棘齿锁紧后,仅能通过操作人员对拉开手柄、打开锁紧装置;一套压杠体锁紧两排棘齿,相互独立。
4 结论
游乐设施乘人束缚装置的可靠有效与否,直接决定着乘人的人身安全,而乘人加速度的分区,是乘人束缚装置设计选型的依据[11]。
(1) 通过乘人与束缚装置的相互作用来确定加速度,并通过实例进行计算,提供了狂呼乘人加速度理论计算方法;
(2)利用Workbench中建立狂呼的动力学模型并进行仿真分析,获得狂呼乘人加速度时间历程曲线,狂呼加速度仿真结果与理论计算误差很小,表明了基于虚拟样机的刚体动力学分析方法和结果的正确性和可靠性[12];
(3)通过对狂呼乘人加速度的理论计算和仿真分析,可以在设计阶段获得乘人所处的加速度区域,为游乐设施束缚装置的设计选型和安全评价提供依据,其计算方法和结果可为旋转类游乐设施乘人加速度的计算和束缚装置的设计选型提供参考[13]。
[1]王进. “狂呼”游艺机振动建模与力学仿真分析[D]. 湘潭:湖南科技大学,2015.
[2]赵九峰. 基于ANSYS Workbench大摆锤刚体动力学分析[J]. 机械研究与应用,2019(1):44-47.
[3]梁朝虎,沈勇,鄂立军,等. 游乐设施G加速度分析与判别方法[J]. 中国安全科学学报,2008(11):31-35.
[4]GB 8408-2018,大型游乐设施安全规范[S].
[5]刘笑天,等. ANSYS Workbench结构工程高级应用[M]. 北京:中国水利水电出版社,2015.
[6]朱海荣,陈刚,丁克勤,等. 基于虚拟样机技术的游乐设施安全分析方法探讨[J]. 中国安全科学学报,2004(3):12-15.
[7]梁朝虎,沈勇,秦平彦,等. 滑行车类游乐设施动力学建模与仿真[J]. 中国安全科学学报,2007(9):14-20.
[8]徐永生,邓贵德,张勇. 数字仿真假人在游乐设施行业中的应用前景[J]. 中国特种设备安全,2018(1):18-23.
[9]张新东. 关于游乐设施人体束缚装置的思考[J]. 中国特种设备安全,2017(5):9-13.
[10]刘培广. 游乐设施乘人约束无与加速度的关系[J]. 中国锅炉压力容器安全,2005(2):45-50.
[11]徐锐,项辉宇,张勇. 基于加速度的游乐设施乘人束缚装置应用研究[J]. 中国特种设备安全,2019(10):8-11.
[12]孙颖宏,张晓钟. 基于虚拟样机的发动机曲轴系动力学仿真分析[J]. 机械,2007(8):35-38.
[13]赵九峰. 基于ANSYS Workbench自控飞机回转机构驱动功率的计算及电机选型[J]. 机械,2019(4):30-33.
Acceleration Calculation and Constrained Device Selection of Scream Based on Workbench
SU Xiaofeng1,ZHAO Jiufeng1,DING Zhoubo2,LI Yanbing1
( 1.Special Equipment Safety Inspection and Research Institute of He’nan Province, Zhengzhou 450008, China; 2.School of Mechanical and Electrical Engineering, ZhongyuanUniversity of Technology, Zhengzhou 450007, China )
A theoretical calculation method of acceleration of Scream is given in this paper, and time history curves is extracted on the basis of dynamic simulation analysis by Workbench. Compared with the theoretical calculation results, indicates that the simulation results is reliability and validity. Directs the selection of the passenger constrained device by calculating and dividing into different regions the acceleration of the passenger, which provide the reference for the acceleration calculation and constrained device selection of Rotary type rides, Restrain and control the unsafe behavior of the passengers by the reliability of the constrained device, and improve the intrinsic security of amusement facilities.
scream amusement;g-acceleration;constrained device;dynamics;virtual prototype;amusement facilities
X941
A
10.3969/j.issn.1006-0316.2020.05.003
1006-0316 (2020) 05-0018-06
2019-11-18
苏晓峰(1972-),女,河南长垣人,高级工程师,主要从事特种设备检验技术管理工作。*通讯作者:赵九峰(1981-),男,河南平顶山人,硕士研究生,CAD/CAE工程师、检验师,主要从事游乐设备设计计算、特种设备结构仿真与载荷响应研究工作,E-mail:zjf_2002@163.com。
猜你喜欢
机械管理开发(2022年3期)2022-05-14
小天使·聪聪画刊(2022年2期)2022-03-24
汽车工程师(2021年12期)2022-01-18
当代作家(2021年10期)2021-11-09
孩子(2021年6期)2021-06-15
少儿美术(2021年3期)2021-04-26
作文小学高年级(2020年11期)2020-12-29
汽车零部件(2020年9期)2020-09-28
现代园艺(2018年1期)2018-03-15
中国设备工程(2017年15期)2017-01-20