
智能振动碾压机的自抗扰循迹控制方法
2020-06-24 08:52赵龙同阮迪望
天津大学学报(自然科学与工程技术版) 2020年9期
谢 辉,赵龙同,阮迪望
智能振动碾压机的自抗扰循迹控制方法
谢 辉,赵龙同,阮迪望
(天津大学机械工程学院,天津 300072)
循迹控制是实现智能振动碾压机自动化工作的重要环节.为了改善智能振动碾压机在非结构化路面环境下的循迹效果,解决现有控制算法存在的调参工作量大以及鲁棒性低等问题,本文提出了一种基于扰动观测的反步控制方法.首先,建立了振动碾压机的整车运动学模型和一种具有预测功能的误差动态模型.然后,基于一台改装的智能振动碾压机平台研究了外界扰动对车辆的铰接角度、航向角度及位置的影响规律,发现外界扰动对碾压机的铰接角、航向角度的影响需要实时观测估计,而对碾压机轮位置的影响可通过姿态信息修正补偿.最后,在以上研究的基础上设计了扩张状态观测器用于实时估计系统内外总扰动,从而将误差动态模型简化为串联积分型系统,并基于李雅普诺夫函数设计控制器的反馈控制律.Simulink和硬件在环的仿真结果表明:在车辆的铰接角、航向角同时受内部、外界扰动作用的情况下,循迹连续弯道曲线中距离、角度和曲率误差的最大值分别为0.088m、0.118rad和0.042m-1.说明基于扰动观测的反步控制方法展现了良好的控制精度和鲁棒性.
振动碾压机;反步控制;扩张状态观测器;循迹控制
振动碾压机作为一种高效的压实机械被广泛应用于道路、水利大坝的建设中.振动碾压机属于铰接式液压转向车辆的一种,是一个高度非线性的时滞系统,建立其精准模型难度大,给车辆循迹复杂曲线的控制带来巨大挑战.同时,振动碾压机在复杂的非结构化路面环境中工作,要求设计的循迹控制器有较强的鲁棒性.
针对以上挑战,国内外的学者对铰接式液压转向车辆的循迹控制做了许多的研究工作.Bian等[1]对振动碾压机做了运动学建模,并基于李雅普诺夫稳定性理论设计了控制律;Roberts 等[2]首次提出了3个误差标准(距离误差、航向误差和曲率误差),并使用PID算法做圆形轨迹的跟随控制;Nayl等[3-4]在Roberts等工作的基础上建立了考虑轮胎侧偏特性的整车的运动学模型,并运用模型预测控制算法做圆形轨迹的跟随;Mäkelä[5]结合预瞄控制算法的思想设计了循迹复杂曲线的4个偏差变量,针对每个偏差变量调节相应的比例增益值,使系统达到稳定.另外,针对乘用车的曲线循迹方法较多,比较有代表性的是张智刚等[6]基于阿克曼转向几何的纯追踪控制,该方法对循迹曲线具有计算量小的优势;Hoffmann等[7]引入的航向偏差和距离偏差使得乘用车辆可以做复杂曲线的循迹.
振动碾压机工作在复杂的地面环境,控制算法需要考虑外界扰动及内部扰动对控制效果的影响.卞永明等[8]针对振动碾压机设计了模糊控制算法来解决扰动影响控制效果的问题;Nayl等[9]针对铰接式小车设计了一种滑模控制器,在有外界扰动的情况下循迹曲线具有较好的效果.韩京清[10]提出的扩张状态观测器能有效观测系统内外的总扰动,通过扰动的前馈补偿可以提高控制系统的快速性和鲁棒性.Yao 等[11]针对振动碾压机提出一种前馈加反馈的控制策略,以适应在不同大小误差下循迹曲线的问题,其中大误差下主要是基于阿克曼转向几何的前馈控制器起主要作用,小误差下设计的具有抗扰特性的ADRC反馈控制器起主要作用.
综合以上国内外研究内容,结合工程建设的需求,总结目前振动碾压机循迹连续复杂曲线控制的主要工作方向为研究振动碾压机在非结构化路面环境工作时,由于系统模型不精确、内外界不确定性扰动等作用于车辆导致车辆产生不期望运动的预测及抑制,同时要求开发的控制算法降低调参工作量及执行器负载.本文基于以上工作方向提出了一种基于扰动补偿循迹复杂曲线的控制方法.首先建立了振动碾压机的运动学模型,并采用批处理最小二乘法完成了参数辨识.在此基础上,设计了一种具有预测功能的误差动态模型(距离、角度、曲率误差),并提出了一种基于扩张状态观测器(extended state observer,ESO)的反步(backstepping)控制算法.最后在一台标定好的振动碾压机模型上验证了控制算法的有效性.
1 面向控制的建模
1.1 振动碾压机的物理建模
振动碾压机主要由前车身、后车身、驾驶室三部分组成.前后车身通过“十字轴”的铰接机构连接;后车身与驾驶室通过弹簧、阻尼连接;前车身通过碾压轮与地面接触;后车身通过轮胎与地面接触.建模的目的是建立一个能够准确反映车辆运动特性的振动碾压机模型,并支持控制算法的开发.因此,做出以下假设:①忽略车辆的垂向运动;②车辆工作在平坦路面无扰动作用;③忽略车辆轮胎及碾压轮的横、纵向滑移;④车辆前车身的质心位于振动碾压轮的中心位置,后车身的质心位于两轮胎转动中心连线的中间位置.
基于上述假设,可以将车辆简化为投影在地面上的刚体,如图1所示.图1中,为笛卡尔平面坐标系,1、2分别代表着车辆铰接中心点与前车身质心1点(1,1)和后车身质心2点(2,2)的距离;1、2分别代表向量1和向量2与轴正向的夹角,定义逆时针转动角度增加;1、2分别代表前、后车身方向的速度,定义前进为正值;为前后车身的相对转角,命名为铰接角,并定义2、、1点在同一条直线上时的铰接角为0,前车身相对后车身逆时针转动时铰接角增加.

图1 振动碾压轮模型
前车身质心的速度1在轴、轴的分量为
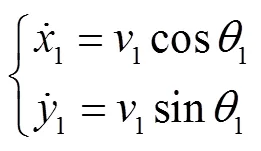
根据振动碾压机的运动几何关系,可得到
由于假设车辆不存在横向滑移,则
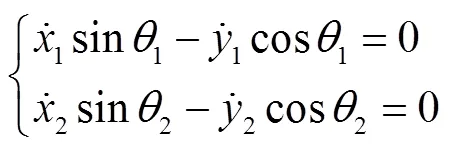
将式(2)对时间求导,并把式(3)代入,可得到前车身航向角的变化率为

综合以上公式,把振动碾压机运动学模型等式写成状态空间方程形式,即

1.2 误差动态模型
误差动态模型根据精准、快速循迹的要求和目标轨迹提供的位置、航向角和曲率等信息来设计.车辆在低速循迹曲线时,以目标轨迹上距离车辆当前位置最近点作为循迹点即可满足循迹精度要求,因此定义距离误差和航向角误差,其中距离误差为车辆前车身质心点1与目标轨迹上距离最小的点1的距离,以d表示,如图2所示,并定义当1点位于1点左侧时距离误差为正;航向角误差为1点航向角与1点航向角的差值,以E1表示.
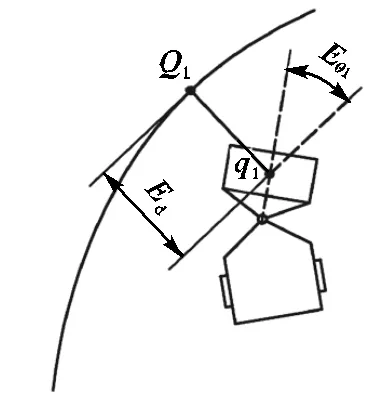
图2 距离误差与航向角误差的定义
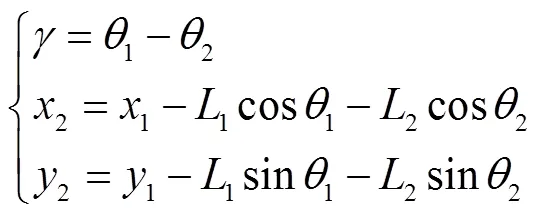
车辆在较高速度循迹曲线时,不仅要求d、E1逐渐趋向于0,还要求根据目标轨迹的变化规律提前计算控制量,因此需要基于1点预瞄一段距离,如图3所示,其中与车辆的速度和线控转向执行器的延迟有关.另外,在距离误差、航向角度误差基础上增加期望角度误差E2和曲率误差c的定义,其中期望角度误差为线1与线1的夹角,为车辆从1点运动到2点的转动中心,为车辆从1点运动到2点的转动中心,并定义车辆逆时针运动时E2为正;曲率误差为期望运动轨迹的曲率-1与实际运动轨迹的曲率-1的差值.在图3中,车辆从1点运动到2点的期望运动轨迹为圆弧12,并定义该圆弧曲率与目标轨迹中1点的曲率相同.
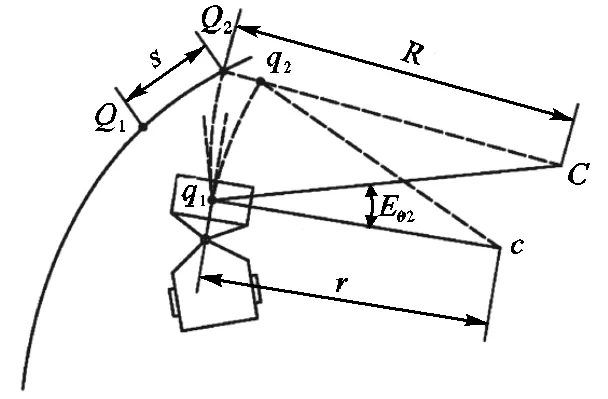
图3 期望角度误差与曲率误差的定义
综上,循迹复杂曲线的3个误差变量为距离误差(d)、角度误差(E)和曲率误差(c).其中角度误差E=E1+E2.
图4显示了以上3个误差变量的几何关系,其中d为车辆从1点运动到2点转过的圆心角,d为车辆从1点运动到2点转过的圆心角.假设d、d非常小,则d=d,dd=Erd,又因为从1点运动到2点的时间段内,E为常数,故对dd=Erd等式两边分别除以d,可得


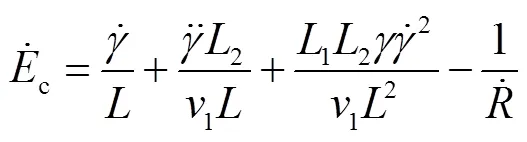
假设车辆前车身质心的速度1为常数,则曲率误差的变化率为




2 控制算法的设计
2.1 扰动分析
在对控制器设计抗扰功能时,首先要通过理论分析及试验测试确定影响车辆的位置、航向角、运动轨迹曲率的外界因素及影响规律,从而有针对性地设计扰动观测器,减少扰动观测器的引入数量.同时,在控制器仿真验证阶段,辅助扰动案例的设计,减少实车测试成本.理论分析得出车辆受扰动的主要因素如下:①车辆自身的振动碾压模式导致车辆产生不期望的滑移和铰接角及航向角的变化;②非结构化的路面导致车辆姿态变化,行驶阻力矩作用于碾压轮导致车辆状态量变化.因为车辆的位置、航向角、速度信息由GPS传感器采集,所以当车辆发生侧倾或俯仰时,GPS定位的点与期望定位点发生偏移;当行驶阻力矩作用碾压轮时,将会直接影响铰接角度发生变化,进而影响车辆的航向角及运动轨迹曲率的变化.由于车辆在循迹复杂曲线时通常不开启振碾模式,因此本文只通过试验分析非结构化路面引起的扰动对车辆状态量的影响.
在一台改装的智能振动碾压机平台,测试车辆在非结构路面运行时,石块、凹坑等外界扰动量对车辆铰接角、航向角等状态量的影响规律,其中车辆参数及安装的主要传感器的特性如表1和表2所示.图5显示了车辆的碾压轮在50~75s的时间段越过地面凸起的石头,在越过石头的时间段内,车辆的侧倾角经历了先增加后急剧减小的过程(见图5(d)),进而导致碾压轮的横向坐标发生同样的变化(见图5(a)).同时,由于碾压轮与地面相互作用的力分布不均匀,产生不期望的转向力矩,从而导致铰接角发生不期望的先减小再增大的变化(见图5(c)),进而引起前后车身航向角的变化.在图5(b)中,后车身较前车身的航向角变化大,因为车辆前进时,前车身转向阻力大于后车身,又由于车辆是铰接式转向,所以后车身的航向角变化大.从图5(f)可知,车辆在60~70s的时间段内发生了较大的俯仰角变化,但是对铰接角和碾压轮的纵向位置几乎没有影响(见图5(e)).
表3统计了扰动作用时间段内碾压轮横向位置、航向角、侧倾角及车辆铰接角的最大变化量.通过多组试验测试,进行数据分析可知:碾压轮横向位置变化量与碾压机侧倾角变化的确定性因果关系简单明确,而铰接角、航向角与侧倾角之间的因果关系复杂,不方便建模.所以,非结构化路面引起的碾压轮横向位置变化可以通过姿态修正,而对车辆铰接角及碾压轮航向角的影响则需要设立实时的扰动观测器进行估计.本文对姿态修正算法不做研究,假设控制器获得的车辆位置信息是通过姿态修正算法处理后得到的.
2.2 扩张状态观测器
式(7)和(10)中,航向角变化率、铰接角加速度不容易通过传感器直接测量,即使可测量也存在测量精度低的问题.因此,可以把不容易测量的量当成扰动量处理,通过状态观测器来实时估计.扩张状态观测器可以把内部、外界扰动归为总扰动处理,即式(7)和(10)可简化为


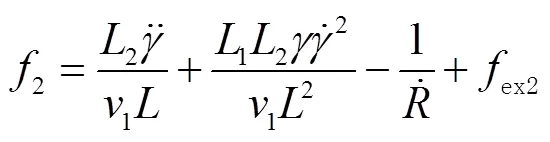
式中:1为角度误差系统中的总扰动;2为曲率误差系统中的总扰动;ex1为角度误差系统中的外界扰动;ex2为曲率误差系统中的外界扰动.
表1 车辆参数

Tab.1 Parameter of vehicles
表2 主要传感器的特性

Tab.2 Characteristics of main sensors

图5 侧倾角、俯仰角对车辆位置、铰接角、航向角的影响(方向盘转角保持恒定值不变)
表3 非结构化路面上的扰动对车辆状态量的影响

Tab.3 Influence of the disturbance on the unstructured road on the state quantity of vehicles
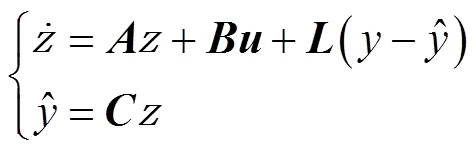
根据式(11)和(12),可用1阶的状态观测器(ESO)实时观测作用于系统的总扰动,式(11)和(12)均可写成如下状态空间形式:
因此,线性扩张状态观测器[12]可设计为



2.3 反步控制器
根据扩张状态观测器化简系统,重新把误差动态模型写成状态空间方程形式,即

式(15)是串联积分型系统,因此可使用目前非常流行的反步算法[13]设计循迹控制器,则基于扰动观测的反步控制器框架如图6所示,图中u为被控对象的输入量,x、y、θ、c为前车身纵向位置、横向位置、航向角、运动轨迹曲率,下标ref代表目标量,下标act代表实际量.
将误差动态模型看成由3个子系统(距离误差子系统、角度误差子系统、曲率误差子系统)组成.针对式(15)中的距离误差子系统,定义Lyapunov预选函数为
将1对时间求导,可得
式中d>0.将式(18)带入式(17),可得

定义角度误差子系统的Lyapunov预选函数为
将2对时间求导,可得


其中k>0.将式(23)代入式(22),可得

定义曲率误差子系统的Lyapunov预选函数为

将3对时间求导,可得

令
其中c>0.将式(28)代入式(27),可得

因此式(12)全局指数稳定.把式(11)、(12)、(18)、(20)、(23)代入式(28)中,可得控制率为


3 控制算法仿真与验证
3.1 车辆运动学模型的标定与验证
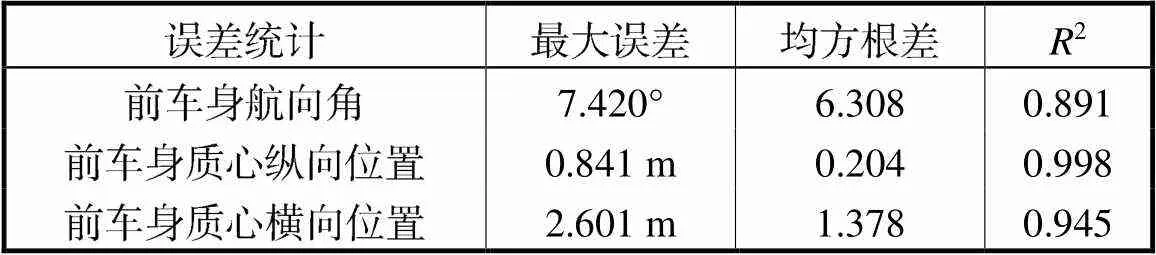
为了验证控制算法的有效性,对振动碾压机的运动学模型进行了标定和验证.在一台改装的智能振动碾压机平台上采集车辆的位置、速度、航向、方向盘角度等信息,采集车辆实际运行的7500个工况数据,其中标定采用70%数据,验证采用30%数据.基于标定数据集,采用批处理最小二乘法对第1.1节中的运动学模型进行修正、标定,主要修正传感器的安装位置误差及标定1和2.修正、标定完成后的模型计算结果与实际车辆采集数据的比较如图7所示.然后用验证数据集对模型进行验证,主要参数的验证结果见表4,验证数据表明实际车辆运动与模型计算的横向、纵向位置和航向角的2分别为0.945、0.998和0.891.因此,该运动学模型的精度满足了对控制算法的验证要求.
3.2 仿真结果
循迹控制算法的性能测试首先在Simulink仿真环境下进行,之后借助DSPACE仿真平台和本课题组开发的单片机联合测试算法的性能.
3.2.1 Simulink仿真


图7 振动碾压机的运动模型标定结果
表4 模型验证结果
Tab.4 Accuracy results of model
根据第2.1节的扰动分析,设计以下4个案例验证控制器的性能,其Simulink仿真结果见图8.
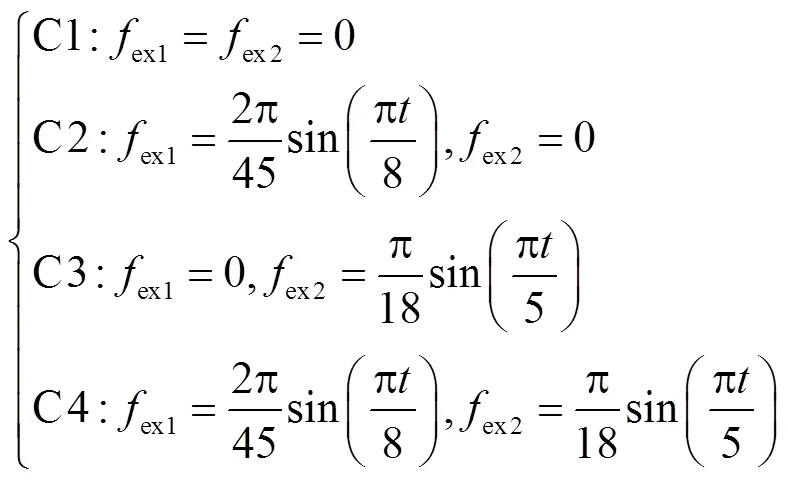

在图8中,由于车辆初始状态与目标轨迹相差较大,所以在=0s的时刻有较大的距离误差、角度误差和曲率误差.从图8(a)、(b)可知,4个案例与目标轨迹几乎一致,距离误差在“0”值附近有微小波动,说明开发的控制算法具有良好的控制精度.从图8(c)、(d)可知,当外界扰动作用于车辆时,ESO观测到外界扰动变化,说明开发的控制算法表现出良好的鲁棒性.对4个案例的距离误差做统计分析,结果见表5.从表5中可知:在航向角和铰接角同时受外界总扰动的作用下,距离误差最大绝对值为0.081m.
3.2.2 HIL仿真
借助DSPACE仿真模拟器和本课题组开发的多核单片机控制器搭建了智能振动碾压机硬件在环仿真平台,硬件仿真平台的架构如图9所示.将第3.1节验证的模型作为硬件仿真平台的被控对象,同时根据第2.1节的扰动试验数据模拟了非结构化路面对车辆状态量的影响.图10展示了车辆在模拟的非结构化路面上运动时车辆状态量的变化,车辆每间隔50s会遇到随机大小的石块、随机深浅的凹坑,并且石块和凹坑作用于碾压轮位置也是随机变化的.对比图10与图5可知:当相似大小的石块或凹坑作用于车辆碾压轮同侧位置时,车辆的侧倾角、铰接角、航向角发生相同规律性的变化.因此可用设计的非结构化路面案例模拟车辆真实的运行环境,进而评价开发的循迹控制算法的性能.
表5 Simulink测试的误差统计

Tab.5 Error statistics in Simulink test
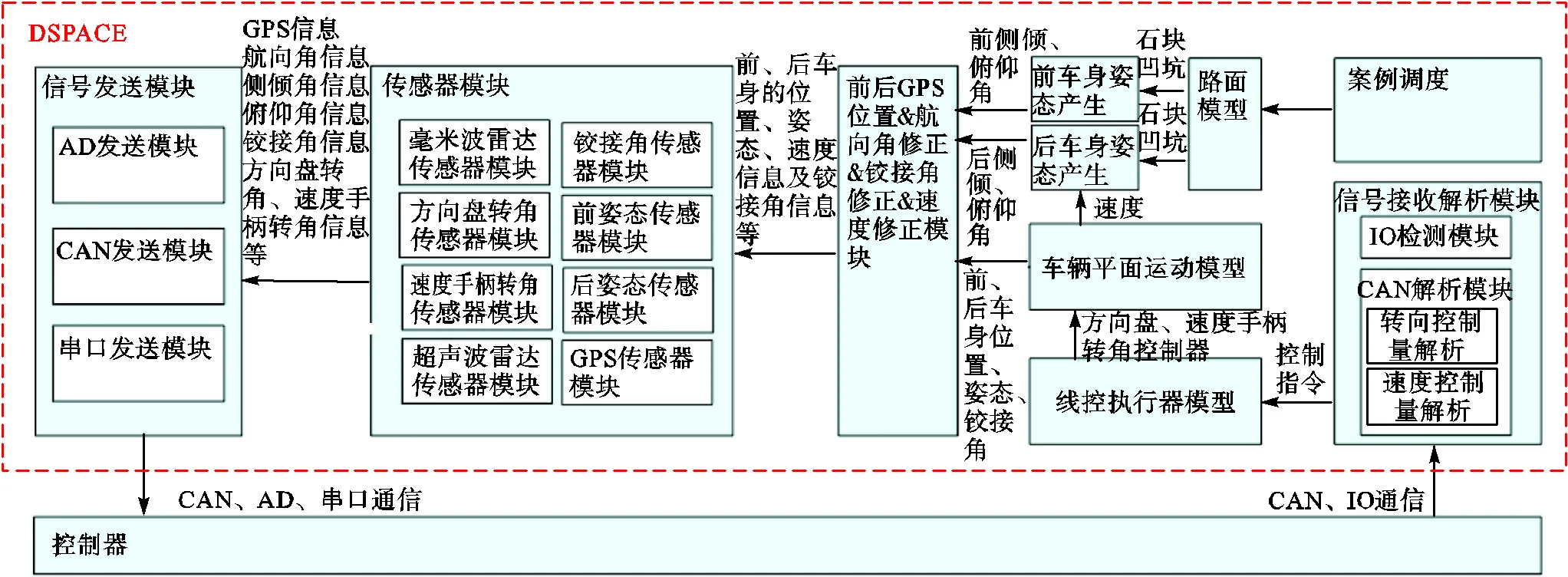
图9 硬件在环仿真平台框架

图10 车辆在模拟的非结构化路面运动时侧倾角、俯仰角对车辆位置、铰接角和航向角的影响

开发的循迹控制算法在有、无外界扰动作用的案例测试中做了误差统计分析,统计结果见表6.从统计结果来看,无外界随机扰动的作用下,距离误差、角度误差、曲率误差的最大值分别为0.072m、0.087rad、0.032m-1,说明开发的控制算法表现出良好的控制精度.在有、无外界扰动作用于车辆的误差均值对比中可知:两种案例下的距离误差均值、角度误差均值、曲率误差均值都相差很小,说明开发的循迹控制算法具有较好的鲁棒性.
表6 非结构化路面上车辆循迹的误差统计

Tab.6 Error statistics of vehicle tracking on unstructured roads

图11 硬件在环仿真平台2种案例的结果
4 结 论
(1) 建立了振动碾压机的运动学模型,并采用批处理最小二乘法离线进行了参数辨识.利用实车数据验证了模型,验证结果表明:车辆前车身的位置、航向状态量的2均大于0.89,符合验证控制器性能的使用要求.
(2) 建立了一种误差动态模型,考虑到车辆在较高速度情况下,循迹目标轨迹需要根据其变化趋势提前计算控制量,因此在距离误差、航向误差的基础上增加了期望航向和曲率误差,使循迹复杂曲线的控制算法具有了预测功能.
(3) 实车试验非结构化路面对车辆位置、铰接角、姿态角的影响.分析数据得出结论:车辆在非结构化的路面循迹目标轨迹时,需要实时观测外界扰动对铰接角、航向角的影响;而对车辆位置的影响与侧倾、俯仰角间确定性因果关系简单明确,可通过采集车辆姿态信息几何修正车辆的位置,因此不需要设计扰动观测器观测扰动对车辆位置的影响.
(4) 提出一种ESO与反步控制相结合的循迹控制算法框架,ESO能有效实时地估计内部和外界总扰动,利用两个ESO将系统改造为串联积分型,改造后的系统适合采用反步控制设计控制律.
(5) 采用HIL平台测试开发的控制算法,测试结果表明:在非结构化路面上,随机外界扰动作用于车辆时,距离、角度和曲率误差的最大值分别为0.088m、0.118rad和0042m-1,说明开发的控制算法有较好的控制精度及鲁棒性.
[1] Bian Yongming,Yang Meng,Fang Xiaojun. Kinematics and path following control of an articulated drum roller[J]. Chinese Journal of Mechanical Engineering,2017,30(4):888-899.
[2] Roberts J M,Duff E S,Corke P I,et al. Autonomous control of underground mining vehicles using reactive navigation[C]//Proceedings 2000ICR. San Francisco,USA,2000:DOI:10. 1109/ROBOT. 2000. 845322.
[3] Nayl T,Nikolakopoulos G,Gustafsson T. A full error dynamics switching modeling and control scheme for an articulated vehicle[J]. International Journal of Control,Automation and Systems,2015,13(5):1221-1232.
[4] Nayl T,Nikolakopoulos G,Gustafsson T. Switching model predictive control for an articulated vehicle under varying slip angle[C]//20th Mediterranean Conference on Control & Automation(MED). Barcelona,Spain,2012:890-895.
[5] Mäkelä H. Overview of LHD navigation without artificial beacons[J]. Robotics and Autonomous Systems,2001,36(1):21-35.
[6] 张智刚,罗锡文,赵祚喜,等. 基于Kalman滤波和纯追踪模型的农业机械导航控制[J]. 农业机械学报,2009,40(增1):6-12.
Zhang Zhigang,Luo Xiwen,Zhao Zuoxi,et al. Trajectory tracking control method based on Kalman filter and pure pursuit model for agricultural vehicle[J]. Transactions of the Chinese Society for Agricultural Machinery,2009,40(Suppl 1):6-12(in Chinese).
[7] Hoffmann G M,Tomlin C J,Montemerlo M,et al. Autonomous automobile trajectory tracking for off-road driving:Controller design,experimental validation and racing[C]//Proceedings of the American Control Conference. New York,USA,2007:DOI:10. 1109/ACC. 2007. 4282788.
[8] 卞永明,方晓骏,杨 濛,等. 基于模糊算法的无人驾驶压路机自动碾压控制[J]. 同济大学学报:自然科学版,2017,45(12):1830-1838.
Bian Yongming,Fang Xiaojun,Yang Meng,et al. Automatic rolling control for unmanned vibratory roller based on fuzzy algorithm[J]. Journal of Tongji University:Natural Science,2017,45(12):1830-1838(in Chinese).
[9] Nayl T,Nikolakopoulos G,Gustafsson T,et al. Design and experimental evaluation of a novel sliding mode controller for an articulated vehicle[J]. Robotics and Autonomous Systems,2018,103:213-221.
[10] 韩京清. 自抗扰控制技术[M]. 北京:国防工业出版社,2016.
Han Jingqing. Active Disturbance Rejection Control Technology[M]. Beijing:National Defense Industry Press,2016(in Chinese).
[11] Yao Dongchun,Xie Hui,Qiang Wei,et al. Accurate trajectory tracking with disturbance-resistant and heading estimation method for self-driving vibratory roller[J]. IFAC-PapersOnLine,2018,51(31):754-758.
[12] Gao Zhiqiang. Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the American Control Conference. New York,USA,2003:4989-4996.
[13] 廖煜雷,万 磊,庄佳园. 欠驱动船路径跟踪的反演自适应动态滑模控制方法[J]. 中南大学学报:自然科学版,2012,43(7):2655-2661.
Liao Yulei,Wan Lei,Zhuang Jiayuan. Backstepping adaptive dynamical sliding mode control method for path following of underactuated surface vessel[J]. Journal of Central South University:Natural Science Edition,2012,43(7):2655-2661(in Chinese).
Path Following Control Method with Active Disturbance Rejection for an Intelligent Vibration Roller
Xie Hui,Zhao Longtong,Ruan Diwang
(School of Mechanical Engineering,Tianjin University,Tianjin 300072,China)
Path following is an important link to realize the automatic operation of intelligent vibration rollers.The existing control algorithms have problems such as large workloads imposed by the adjustment of parameters and low robustness.In order to improve the tracking effect of an intelligent vibrating roller in an unstructured road environment and solve these problems,a backstepping control method based on disturbance observation was designed.First,the kinematics model of the vibration roller and a novel error dynamics model with prediction function were established.Then,the influence of external disturbance on articulation angle,heading angle,and roller position in a modified intelligent vibration roller platform was studied.Real-time observation and estimation are necessary to determine the influence of external disturbance on the articulation angle and heading angle of a roller,and the influence on the roller position can be corrected by attitude information.Finally,based on the above research,an extended state observer was designed to estimate the total disturbances in real time.This observer simplifies the error dynamic model to a series integral system.The feedback control law of the controller was designed based on Lyapunov function.Simulink and hardware-in-the-loop simulation results show that the maximum values of the distance,angle,and curvature errors are 0.088m,0.118rad,and 0.042m-1,respectively,under the condition that both the articulation angle and heading angle of the roller are disturbed by internal and external disturbances.The results show that the backstepping control method based on disturbance observation exhibits good robustness and accuracy.
vibration roller;backstepping contral;extended state observer;path following control
TP242.6
A
0493-2137(2020)09-0900-10
10.11784/tdxbz201909018
2019-09-03;
2019-11-08.
谢 辉(1970— ),男,博士,教授.
谢 辉,xiehui@tju.edu.cn.
天津市科技计划资助项目(17ZXRGGX00140).
Supported by the Science and Technology Plan Project of Tianjin,China(No.17ZXRGGX00140).
(责任编辑:金顺爱)
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
新疆大学学报(自然科学版)(中英文)(2022年3期)2022-06-04
昆明医科大学学报(2022年1期)2022-02-28
计算机测量与控制(2021年6期)2021-06-30
汽车工程(2021年12期)2021-03-08
民用飞机设计与研究(2019年4期)2019-05-21
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
东方教育(2017年19期)2017-12-05
