
基于SURF 算法的MEMS 平面微运动测量
2020-08-28 05:40张瑞峰刘铁根
自动化与仪表 2020年8期
赵 帆,桑 梅,王 双,张瑞峰,刘铁根
(1.天津大学 精密仪器与光电子工程学院,天津300072;2.天津大学 光电信息技术教育部重点实验室,天津300072;3.天津大学 微电子学院,天津300072)
微机电系统MEMS(micro electro mechanical systems)是一种尺寸在微米量级的,涵盖了传感、处理、 执行等一种或多种功能在内的电子机械器件。对于含有机械可动部件的MEMS 传感器、执行器来说,其工作状态下的动态特性可以直接揭示出器件性能的优劣。 因而在MEMS 器件的设计及加工过程中,对器件进行动态特性检测,有助于优化设计,改进工艺,提高器件性能和良品率,对于MEMS 的设计和加工制造具有重要意义[1]。
1 MEMS 器件动态特性检测方法的研究
由于MEMS 器件普遍具有尺寸小和谐振频率高的特点,其动态性能通常采用激光多普勒测振仪LDV(laser doppler vibrometer)进行测量与分析[2],然而该方法成本较高,且只能对MEMS 动件的离面振动特性进行测量,而无法对其面内运动特性进行测量。
针对MEMS 器件的面内运动特性检测,国内外有许多的研究人员开展了工作。 文献[3-4]设计了基于光纤F-P 干涉微位移传感原理的MEMS 面内运动测量系统,但测量的频率范围较低,难以满足高频振动测量的应用场景;文献[5]结合了频闪成像及亚像素模板匹配法测量面内微运动,但图像处理算法时间复杂度较高,难以实现实时测量;文献[6]设计了基于光流法的MEMS 面内测量算法,但当测量物体亮度出现变化时会产生较大的测量误差;文献[7]设计了基于视觉算法的图像边缘特征提取法,该算法运行速度快但精度较低;文献[8]设计了基于同态滤波的微运动测量算法,但是当图像尺寸较大时算法对计算机算力的要求较高。
针对上述问题,在此提出一种基于特征点检测的面内微位移测量方法。 通过对MEMS 器件的频闪图像进行特征点检测与匹配,利用特征点对的统计规律对MEMS 的面内位移进行表征;搭建了一套频闪微视觉系统,对测量算法进行测试验证。 试验结果证明了该测量方法不仅具有较高的测量精度,还具有较高的稳定性与运行效率,可以快速准确地对MEMS 的面内运动进行测量。
2 MEMS 面内运动的解调方法
2.1 频闪微视觉频闪图像采集
由于MEMS 器件普遍具有自身尺寸小,振动幅度小,振动频率高等特点,用普通的成像方法难以捕捉其清晰的动态图像,因此需要借助频闪微视觉技术来获取其在一个周期内的运动组图[3]。 频闪微视觉系统主要由LED 频闪光源、金相显微镜、图像采集模块构成,如图1 所示。
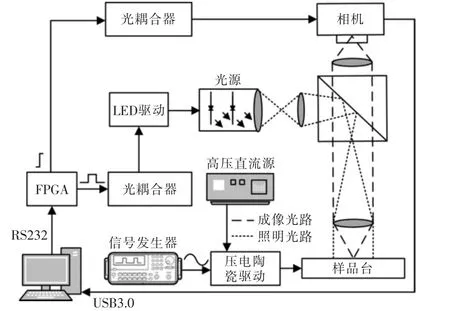
图1 频闪微视觉系统框图Fig.1 Block diagram of stroboscopic micro-vision system
频闪光源由FPGA、LED 驱动电路和一个波长为480 nm 的大功率LED 等3 个部分组成。 FPGA输出一路具有相位延迟的频闪种子脉冲信号和一路控制相机曝光的触发信号。 其中,频闪种子脉冲经过驱动电路放大后,驱动LED 发出具有相位延迟的频闪光脉冲。 金相显微镜配备平场消色差物镜,放大倍数为20 倍。 图像采集使用2000 万像素高分辨率CMOS 工业相机,将图像信号实时发送到计算机,使用特征点算法进行面内位移分析。
在黑暗环境当中,使用频闪光源发出一束脉宽远小于MEMS 振动周期的窄脉冲光,对MEMS 表面照明,此时将在相机感光片上呈现清晰的MEMS 图像。 当MEMS 振动频率足够快时,闪光脉冲将变得非常窄, 此时单次闪光无法达到清晰成像的条件。因此在已知MEMS 振动频率的情况下,使用频闪光源对放置于黑暗环境下的MEMS 进行周期性频闪补光, 控制频闪周期与MEMS 运动周期严格相等,这样可以使MEMS 在每次受到照明时都处于相同的振动相位,即将MEMS 的振动“冻结”在当前相位,如图2 所示。

图2 控制信号时序图Fig.2 Control signal timing diagram
经过一系列的频闪补光,工业相机就可以捕捉到清晰的MEMS 图像,而后使频闪脉冲做ΔΦ 的相位延迟,可以捕捉到下一相位的运动图像。 重复此过程, 直至捕捉到一个周期的振动瞬间图像序列,从而将高频振动的MEMS 振动转换为一组静态的运动组图,以便于使用位移检测算法进行位移解调。
2.2 基于特征点匹配的面内位移解调算法
特征点检测法包括SIFT[9]、SURF[10]和ORB[11]等。其中,SIFT 算法特征点定位精度最高,但运算耗时最长;ORB 算法运算耗时最少,但其特征点对微小位移不敏感,定位精度难以达到位移测量的要求;SURF 算法在保证精度的情况下,运算速度较SIFT提升10 倍。 故在此采用基于SURF 的特征匹配方法,对MEMS 的面内运动做到快速、精准的测量。
在面内位移的过程中,选取观察范围使得运动部件在图像内的部件做整体移动,在均匀的光照条件下, 使图像中各个像素产生的位移应当是相同的。在此采用基于SURF 的特征点检测算法,对运动图像序列中相邻的2 幅图进行特征点求解与匹配,然后使用RANSAC[12]模型去除匹配中可能存在的误匹配点, 计算出各特征点在相邻图片中的位移,进而得出运动目标整体位移的统计结果。 面内位移测量算法的流程如图3 所示。
由于这里的若干对匹配点都是对同一段位移的表征,因此可以将他们视为对同一段位移的若干次测量,所以各自得出的位移应当遵守正态分布规律。 为进一步减小结果的误差,在此依据3σ 法则,将位移残差超过3 倍标准差的位移匹配结果,视为粗大误差予以去除,然后重新计算标准差,继续依据3σ 检测粗大误差,……,循环该过程进行迭代,直至结果中不包含粗大误差,再计算其均值,以此作为最终的位移测量结果进行输出。
3 试验结果与分析讨论
3.1 模拟试验
基于所提出的面内微位移解调方法,首先采用模拟试验来测试算法的亚像素精度。 先选取1 幅MEMS 薄膜局部结构的图像作为参考图, 分辨率为600×400。 使用三线性插值的方法,将图像的分辨率沿水平方向放大10 倍, 而后将整个图像沿水平方向平移1 个像素,再将平移后的图像沿水平方向缩小到源图像的分辨率,得到将图像沿水平方向平移0.1 个像素的模拟样本。将参考图像沿X 轴以0.1 像素的步长平移100 步,共计移动10 个像素,得到一组位移图像,以此作为测量的模拟样本。

图3 面内位移测量算法Fig.3 Algorithm of in-plane displacement measurement
接下来使用位移测量算法对其进行检测,将每一步的测量结果与之前的测量结果相叠加,得到相对于原图像的位移, 而后将测量结果进行线性拟合,得到拟合结果。 试验数据如图4 所示。

图4 亚像素位移测量结果Fig.4 Sub-pixel displacement measurement results
由试验数据可得,测量结果的均方根误差为0.009 像素,为设定参数的9%;拟合直线的R2为0.99995。
3.2 实际位移测量
试验采用周期信号驱动精密PZT 位移台产生面内位移,通过频闪微视觉显微系统采集MEMS 的位移图像信号进行实际测量,位移台的精度为±10 nm。试验中,首先用标定尺得到40 倍物镜下,每个像素所代表的实际距离为120 nm。 然后, 以歌尔声学MEMS 薄膜结构的一部分为检测对象, 使位移台带动MEMS 按照固定的步长移动10 步, 用工业相机在金相显微镜下采集每步移动后的图像。 采用SURF 匹配算法对采集到的位移图像进行分析,在设定步长分别为15,30,50,100 nm 的距离下,得到相对于初始位置的位移量。 测量结果如图5 所示。
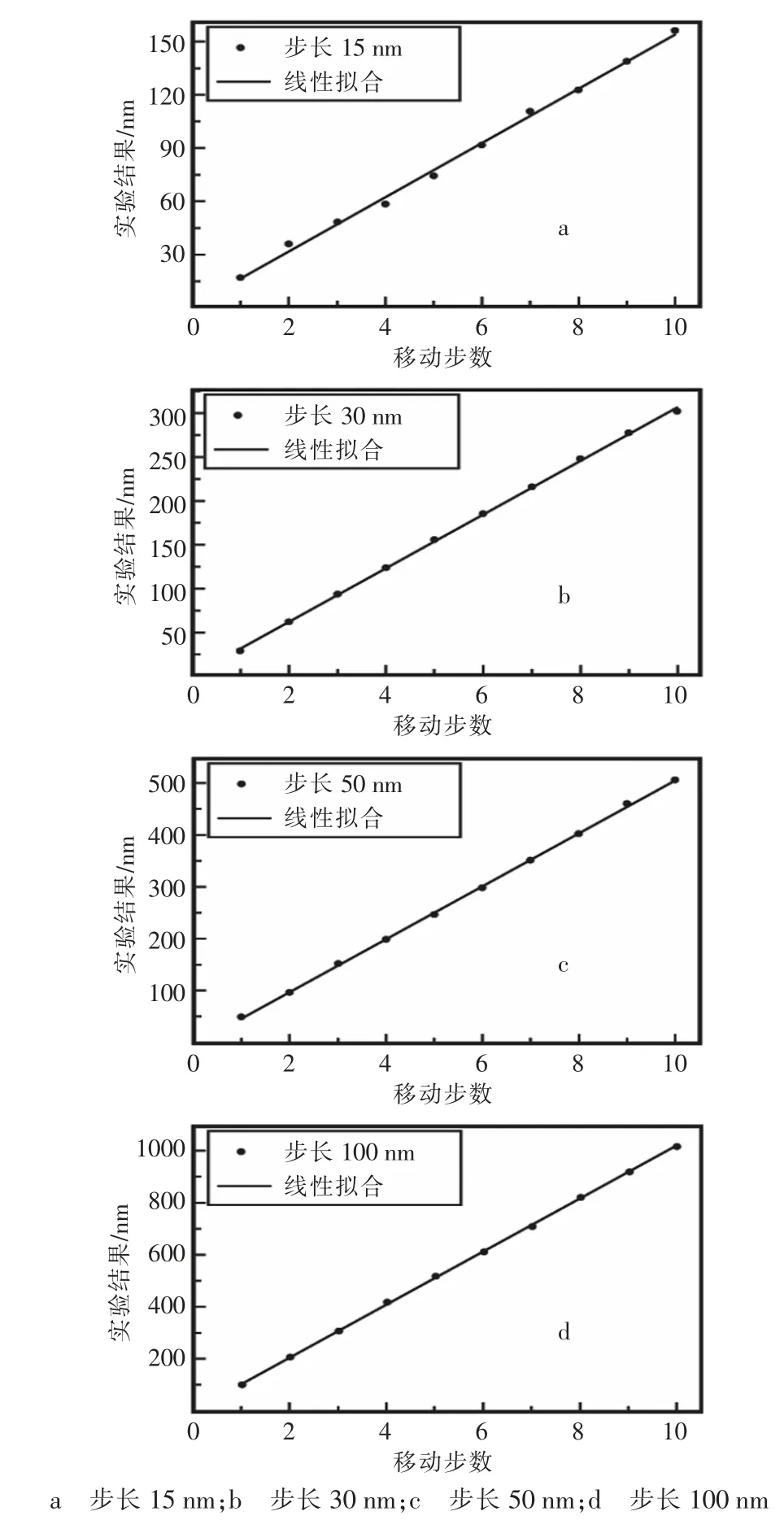
图5 实际位移的测量结果Fig.5 Actual displacement measurement results
测量结果中的平均绝对误差MAE(mean absolute error)和均方根误差RMSE(root mean square error)见表1。
在此以50 nm 的面内位移为例, 理论上对应图像中0.39 像素,分析测量结果中特征点对的残差分布。 采用相机记录位移前后的图像,使用算法进行分析,其结果中所有特征点对的测量结果残差分布如图6 所示。

图6 残差分布的对比Fig.6 Residual distribution contrast
图中,最初的测量样本均值为0.396 像素,标准差为0.158 像素。依据3σ 法则将其中残差大于3 倍标准差的数据点去除后, 得到的样本均值为0.391像素,标准差为0.101 像素。由于采取的位移台移动误差为±10 nm,理论上可以确定该系统的精度可以达到100 nm 量级。 可以看出,去除粗大误差使得测量结果更贴近设定的参数,测量的结果分布更加集中,进一步减小了测量误差。
3.3 MEMS 面内运动解调
使用振动陀螺仪进行面内振动解调的测试。 其陀螺仪的的振动频率为3.16 kHz,振幅6 μm,工作在正弦运动模式, 使用频闪微视觉系统采集MEMS薄膜在1 个周期内的运动图像。 陀螺仪的局部图像如图7 所示。

图7 MEMS 陀螺仪局部图像Fig.7 Local image of a MEMS gyroscope
在1 个周期内等相位间隔地采集100 幅频闪图像,然后使用面内测量算法对图像序列的位移进行解调,得出其1 个周期内的运动参数,并且绘制出每个相位特征点分布的误差带。 其中,对图片序列进行分析得到MEMS 的速度测量结果和拟合参数,然后标出特征点检测的误差限。 位移测量结果如图8 所示。

图8 位移测量结果Fig.8 Displacement measurement results
可以看出, 由于外界环境振动引入的噪声,使得采集的图像中含有一定的误差。 当器件的运动速度较快时,测量结果的均方根误差也会较大,这是由于速度较快时采集的图像边缘会产生一定的模糊导致的。 由拟合结果可见,测量结果与待测目标的面内运动参数有较高的一致性。
4 结语
针对高精度MEMS 面内运动检测的需求,结合MEMS 面内振动以及频闪微视觉系统的特点, 提出了基于特征点匹配的面内振动检测方法,搭建了频闪微视觉系统, 完成了MEMS 器件的面内运动测量。 通过模拟试验及实地测量,特征点匹配算法对MEMS 面内运动测量精度可以达到亚像素级别,整体系统的位移分辨能力可以达到100 nm,测量结果具有较高的可信度, 与理论值具有良好的一致性,可以满足高精度面内运动检测的要求,为MEMS 器件的设计、加工、出厂检测提供重要参考。 该方法可应用于其他以一维运动为主要特征的MEMS 器件,是一种简单有效的MEMS 器件面内运动测量方法。
猜你喜欢
大电机技术(2022年5期)2022-11-17
小哥白尼(军事科学)(2022年2期)2022-05-25
天天爱科学(2020年6期)2020-09-10
疯狂英语·新读写(2020年3期)2020-06-06
红领巾·萌芽(2019年8期)2019-08-27
CHIP新电脑(2016年3期)2016-03-10
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
船海工程(2015年4期)2016-01-05
中国舰船研究(2015年2期)2015-02-10
航天返回与遥感(2014年4期)2014-07-31
