
低信噪比环境下声场重建的正则化方法改进
2021-01-21 12:58肖友洪陈艺凡班海波姜来旭段宇华
哈尔滨工程大学学报 2020年11期
肖友洪, 陈艺凡, 班海波, 姜来旭, 段宇华
(1.哈尔滨工程大学 动力与能源工程学院,黑龙江 哈尔滨 150001; 2.中车大连机车研究所有限公司,辽宁 大连 116021)
近场声全息技术(near-field acoustic holography, NAH)是一种重要的噪声源识别方法,基于空间声场变换[1](spatial transform of sound field, STSF)、边界元[2](boundary element method, BEM)、统计最优[3](statistically optimized near-field acoustical holography, SONAH)、Helmholtz方程最小二乘法[4](Helmholtz equation least squares, HELS)的NAH算法已经在声场重建中得到了广泛应用。基于HELS的NAH将声场近似展开为正交基函数的组合,对重建位置无要求,所需测点数量少,计算效率高,易于实现。利用Tikhonov法[5]或截断奇异值(truncated singular value decomposition, TSVD)法[6]等正则化方法对HELS法声场重建过程中的传递矩阵进行处理,可以改善传递矩阵病态性问题。正则化参数的选取在正则化过程中至关重要,通常采用L-curve法[7],广义交叉验证[8](generalized cross validation, GCV)等。根据不同的研究对象选择不同的正则化参数选取方法,并且信噪比和测量距离等因素对正则化参数的选取均有影响[9]。在实际应用中,Tikhonov法是最常用的正则化方法,但是在低信噪比下,Tikhonov正则化会因正则化参数选取不准确而导致重建失效[10]。
基于固定参数法(manually fixed regularization parameter, Manual)选取正则化参数已在射流噪声的研究中获得了满意的结果[11],本文将其与Tikhonov法结合,建立了正则化参数表达式,在不同信噪比下对双声源辐射声场进行了重建,结合数据外推技术,以数值方法增大测量面[12],并与GCV正则化参数选取方法的声压重建结果进行了对比分析。通过仿真分析和实验研究,验证了Manual法在NAH中应用的准确性和有效性。
1 声场重建基本理论
1.1 HELS法声场重建原理
从振动体辐射到无界流体介质中的声压可以通过独立函数的线性组合来表示[13]:
(1)
式中:ρ和c分别表示介质密度和介质中的声速;Cj为系数向量;Ψj为基函数矩阵。球坐标系下基函数为球面波函数,求解波动方程可得到基函数:
(2)
p(x)=ρcΨC
(3)
解得系数向量C后即可重建任意位置的声压。
1.2 Manual准则
在求解式(3)中的系数向量时,采用Tikhonov正则化并结合奇异值分解可以得到:
(4)
式中:UH、V为单位正交矩阵;Σ为对角矩阵,Σ=diag(σ1,σ2,…,σj),σj为奇异值;J为基函数项数;M为测点数;Fα为正则化矩阵,奇异值按从大到小的顺序排列。Manual法计算正则化参数的原理如下:在计算Σ-1时,设置参考值σref=10-nσ1(-n为最小奇异值的数量级),σ1为最大奇异值,当σj≥σref时,σj=σj;当σj<σref时,σj=σref。
为了在HELS算法中应用Manual法选择正则化参数,提高声场重建精度,本文将Manual法与Tikhonov法进行结合,建立了一种新的正则化参数选取表达式:
(5)
此时正则化矩阵元素为:
(6)
由Manual法选取正则化参数得到的滤波因子不是一个固定不变的值,而是根据奇异值的大小进行判断,若奇异值大于参考值,则不需要进行正则化,正则化参数为0,滤波因子为1;若奇异值小于参考值,则需要进行正则化。相比GCV法对所有的奇异值进行了抑制处理,这种方法的优点是对一些相对较大的奇异值,不进行抑制。小奇异值在逆运算中会对误差进行放大,所以通过设置参考值,将其替换掉,可以获得较高的重建精度;一些相对较大的奇异值,包含了声场传递中的重要特征,不对其进行抑制,可以使重建结果更接近真实值。
另一方面Ψ矩阵的条件数是解对输入数据扰动敏感性的一种量度,矩阵条件数和奇异值有关,通过对一些小的奇异值进行替换,可以降低传递矩阵的条件数。矩阵的条件数定义为:
(7)
式中:σ1是最大奇异值;σn是最小奇异值,Manual法不仅能最大限度地保留有效声场信息,还使传递矩阵的条件数保持在一个较小的数值。
1.3 数据外推
在进行声场重建时,测量点越多,获得的倏逝波信息越丰富,精度越高[14]。但是在实际测试中,只能在有限的孔径上进行测量,为了提高重建精度,需对获得的测量数据进行外推。声源、测量面、外推面和重建面的位置如图1所示。
获得测量声压后由式(4)计算系数向量,代入式(3)中计算外推面声压,把外推面上覆盖测量面部分声压用测量值代替,其余声压不变,继续计算系数向量C进入下一次迭代,迭代过程可示为:
(8)
当2次迭代获得的外推声压变化不大时,终止迭代,将最后一次的外推声压作为式(4)的输入,即可重建复杂声源任意区域的声场。
由于该数据扩展方法通过多次声场重建估计出扩展全息面上的声压,不仅保留了全息面上的原始数据,扩展出的声压仍然满足正交球面波的声辐射模型,且全息孔径边缘处的声压数据连续,重建精度大大提高。避免了传统数据扩展技术,将外围区域声压置为零,使全息面孔径边缘处的声压骤然突变,导致数据不连续,重建精度不高的缺点。

图1 数据外推布局Fig.1 Data extrapolation layout
2 数值仿真
2.1 不同噪声水平下的重建
为了验证本文建立的正则化参数表达式在HELS法声全息中的正确性和有效性,对双声源辐射声场开展了仿真研究。仿真参数如下:2个脉动球源半径为0.1 m,表面振速为2.5×10-3m/s,中心位置分别为(-0.3,0,0)和(0.1,0,0),网格间距均为0.06 m,测量面大小为0.3 m×0.3 m,距声源0.15 m,含有6×6个测点,外推面为0.9 m×0.9 m,含有16×16个测点,重建面大小与外推面相同,测点数相同,距声源0.1 m,相干声场频率为1 000 Hz。
为了研究不同噪声下2种正则化参数选取方法的重建性能,在测量声压中加入信噪比40、20、10 dB的随机噪声,信噪比计算公式为:
(9)
式中Ps和Pm分别是无噪声时的声压矩阵和加入噪声后的声压矩阵。
定义声场重建均方根误差E和重建点相对误差e:
(10)
(11)

图2是无噪声和信噪比为40、20、10 dB下的测量声压,2种参数选取方法在重建面重建的声压云图如图3、4所示。

图2 不同信噪比下的测量值Fig.2 Measurements at different SNR

图3 基于Manual法声压重建结果Fig.3 Sound pressure reconstruction results based on Manual method

图4 基于GCV法声压重建结果Fig.4 Sound pressure reconstruction results based on GCV method
2.2 结果与讨论
4种情况下2种方法的重建误差如表1所示。
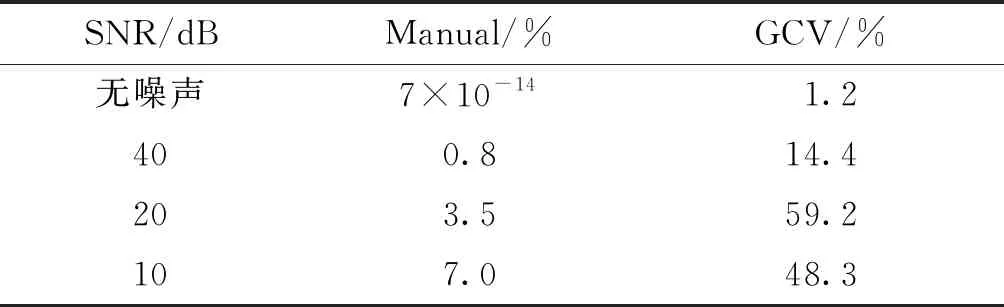
表1 不同信噪比下的重建误差Table 1 Reconstruction errors at different SNR
在无噪声环境下,从图3(a)和图4(a)可以看出,基于Manual法和GCV法都能准确识别出位于(-0.3,0,0)和(0.1,0,0)处的声源,重建点的平均重建误差分别为7×10-14%和1.2%。
在信噪比为40 dB时,从图3(b)和图4(b)可以看出,基于GCV法的重建结果虽然能识别出2个声源,但是在重建面边缘点处的重建声压与理论值出现了偏差,而基于Manual法的重建误差仅为0.8%,声场重建效果较好。
在信噪比为20 dB时,从图3(c)和图4(c)可以看出基于Manual法的重建效果和信噪比为40 dB时基本一致,准确地识别出2个声源。图4(c)中基于GCV法的声场重建结果仅能识别出右侧声源,重建误差已经达到了59.2%。
在信噪比为10 dB时,基于GCV法不能识别出声源,在一些边缘处的重建点的重建误差超过200%,严重偏离真实值。采用Manual法的识别精度虽然有所下降,但是在重建点处的最大重建误差不超过45%,平均重建误差在10%以下。从图3(d)的声场重建结果可以看出2个声源的位置,在边缘点处的重建效果较好,克服了在边界处的不连续问题,Manual法重建性能稳定,重建结果与信噪比为40、20 dB时保持一致,表明Manual法抗噪能力较GCV法强。
在信噪比10~60 dB的范围内,基于Manual法和GCV法的声场重建误差如图5所示。从图5中可以看出,随着信噪比的降低,基于GCV法的重建误差从10%以下上升到90%,而基于Manual法的重建误差波动范围小,一直在10%以下,这表明Manual法在低信噪比时仍然可以达到满意的重建效果,能有效抑制噪声。

图5 不同信噪比下的重建误差Fig.5 Reconstruction errors under different SNR
出现上述现象的原因是在噪声影响不大时,GCV函数寻找最小值时不会出现波动,如图6(a)所示,而当噪声影响较大时,GCV法在获取GCV函数最小值时如图6(b)所示,函数值在最小值附近波动较大,得到的最小值容易出现偏差。
而Manual法对奇异值进行处理前先通过预设的参考值进行判断,大于该参考值的不进行抑制,小于该参考值再进行处理,这样不仅能有效去除噪声,也能最大限度保留声场有效信息。
GCV法在选取正则化参数时出现的不稳定性,使传递矩阵Ψ的条件数急剧增大。如信噪比为10 dB时,由式(7)计算得到基于GCV法的Ψ矩阵的条件数为1 584,而Manual法的Ψ矩阵条件数为1.1,因此Manual法能获得与实际声场接近的重建结果。
3 实验验证
为了验证Manual法选择正则化参数在HELS法声全息中的正确性,在消声室中对间距0.4 m的双声源开展实验研究,实验布置如图7所示。
2个音响中心位置分别为(-0.3,0,0),(0.1,0,0),产生频率为1 000 Hz的相干声场,36个麦克风以0.06 m的间距均匀分布,全息距离为0.15 m,外推面大小为0.9 m×0.9 m,网格间距和位置与全息面相同,重建面位置0.1 m,大小与外推面相同。
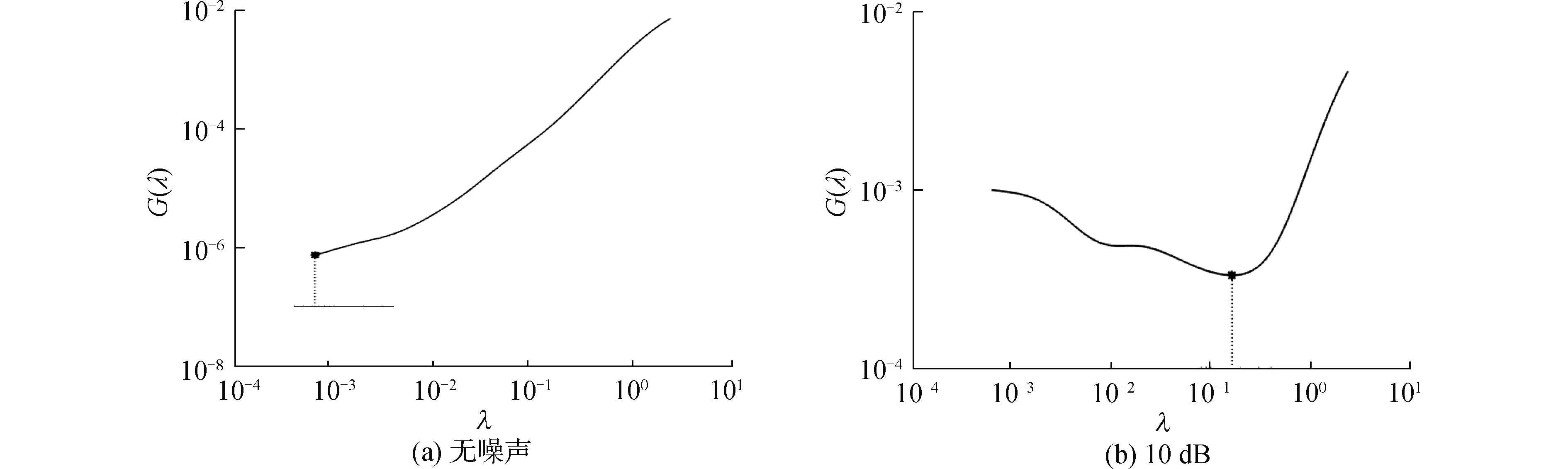
图6 GCV函数曲线Fig.6 GCV function curves

图7 双音箱实验布置Fig.7 Experimental setup of the two loudspeakers
重建结果如图8和图9所示,从图8(a)中可以看出,GCV法只能识别出一个声源,图9(a)显示Manual法不仅可以识别出全息面覆盖的声源,对处于全息面之外的声源也能准确识别。
进一步比较2种方法的数值误差,由测量得到的数据重建全息面位置的声场,取测量位置处的重建声压与测量值比较,GCV法重建误差如图8(b)所示,最大误差为20.3%,平均误差为4.3%,Manual法重建误差如图9(b)所示, 最大误差11.0%,平均重建误差为1.2%。

图8 基于GCV法声压重建结果Fig.8 Reconstruction results based on GCV method

图9 基于Manual法重建结果Fig.9 reconstruction results based on Manual method
实验结果表明Manual法在HELS法声全息中能提高重建精度。
4 结论
1)低信噪比环境下,利用Manual法选取的正则化参数在HELS法声全息中能准确识别双声源的位置,重建精度高。
2)数据外推技术能在少测点的情况下,等效扩大全息面,增加测量数据,实现了更大区域的重建,提高了声场重建精度,能有效的克服测量边界处声压的不连续问题。
3)Manual法根据传递矩阵的最小奇异值预设参考值确定正则化参数,可以避免GCV法在正则化参数选取过程中的波动问题。
猜你喜欢
贵州师范大学学报(自然科学版)(2022年5期)2022-11-18
压电与声光(2022年3期)2022-07-16
现代电影技术(2021年11期)2021-12-27
兰州理工大学学报(2021年3期)2021-07-05
兰州理工大学学报(2021年3期)2021-07-05
物理实验(2020年3期)2020-04-18
铁道通信信号(2020年12期)2020-03-29
中国舰船研究(2019年2期)2019-04-20
汽车工程(2018年12期)2019-01-29
家庭影院技术(2018年11期)2019-01-21
